基于KD*P偏振调制和同程异构的图像同步采集时序控制*
2018-10-12 09:46王希群陈宇超柳光乾
天文研究与技术 2018年4期
王希群,陈宇超,柳光乾
(1. 中国科学院云南天文台,云南 昆明 650011;2. 中国科学院大学,北京 100049)
基于KD*P电光调制原理的偏振分析器在太阳磁像仪中观测磁场已有较长的历史,早在20世纪80年代,文[1-4]中的磁场望远镜就采用了KD*P作为磁场分析器和视向速度场分析器。随着图像传感器、电子和计算机技术的发展,以及天文学家对太阳磁场观测数据的质量和时空分辨率的要求提高,需要控制KD*P的调制状态(即方波调制高压)与图像采集相机每帧图像曝光时间之间的严格同步,否则一帧图像将出现不同的偏振状态。文[5]在怀柔太阳观测基地35 cm真空折射太阳磁场望远镜上对数据采集系统进行升级,实现了KD*P工作高压与CCD曝光的同步。
随着我国1 m新真空太阳望远镜(New Vacuum Solar Telescope, NVST)对太阳实现了多波段的高分辨率成像观测,项目组提出了基于同程异构图像统计重建(简称同程异构)技术的高分辨率磁像仪,目前正在研制中。
高分辨率磁像仪的基本原理是在经典磁像仪的基础上增加一个信噪比高的白光通道,以同步于磁场通道采集大量短曝光(约10 ms)斑点图实施高分辨率统计重建[6-7]。磁场测量通道中偏振分析器可以是基于KD*P的电光调制,也可以是基于旋转波片式的机械调制,基于KD*P调制速度快,成为1 m太阳望远镜磁像仪的首选[8-9]。因此,除两个通道的斑点图采集必须严格同步之外,数据采集系统还需解决两个高速的短曝光斑点图采集与KD*P调制的高压方波之间的同步问题。
为了快速调制的KD*P偏振分析器能成功应用在基于同程异构技术的高分辨率磁像仪中,本文就其数据采集系统开展了深入的研究工作,并设计了基于KD*P偏振调制和同程异构的高速高精度图像同步采集的时序控制系统。
1 1 m太阳望远镜高分辨率磁像仪及KD*P偏振调制原理
1.1 1 m太阳望远镜高分辨率磁像仪的基本结构
1 m太阳望远镜高分辨率磁像仪工作的中心波长为532.419 nm,其中滤光器带宽为0.01 nm,因此窄带(0.01 nm)偏振图像所含光子数极少(仅为正常光球图像的1/500),信噪比非常低,难以应用1 m太阳望远镜在多波段成像系统中发展的观测方法和高分辨率图像统计重建技术获得亚角秒级的高分辨率太阳偏振图像。为了解决这一难题,提出了基于同程异构图像统计重建技术的高分辨率磁像仪,这一技术简称同程异构技术。基本结构如图1,在经典磁场测量中增加一个信噪比高的白光通道,通过严格的同步采集两个通道的大量短曝光斑点图,从有足够信噪比的太阳光球连续谱图像中解算出重建窄带偏振图像所需的统计信息,并用这些信息实现对窄带偏振图像的统计重建[10]。
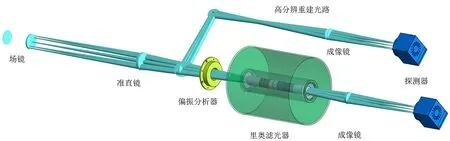
图1 1 m太阳望远镜高分辨率磁像仪的基本结构
Fig.1 Basic structure of NVST high resolution magnetograph
1.2 KD*P偏振调制工作原理
太阳磁场的测量首先要在某条稳定的磁敏谱线上获得 窄带偏振图像,然后才能通过一系列的定标和磁场反演得到太阳磁图,偏振分析器正是这一核心部件。1 m太阳望远镜高分辨率磁像仪的偏振分析器参考怀柔太阳磁场偏振分析器,采用基于KD*P的电光调制原理的偏振分析器,结构如图2,优点是调制速度快,缺点是KD*P需要上千伏的工作高压。
图2偏振分析器对斯托克斯参数(I,Q,U,V)调制的基本公式为
S=0.5I+0.5Q(cosδcos22θ-sinδsin2θ)+
(1)

图2 基于KD*P的偏振分析器
Fig.2 Polarmetric based on KD*P
其中,θ为1/4波片轴的方位角;KD*P轴的方位角为45°;偏振片P的轴方位角为0°;δ为KD*P的相位延迟量。偏振分析器测量斯托克斯参数(I,Q,U,V)的调制方法如下。
(1)测量V时,将1/4波片移出,在KD*P上加交变的方波电压,使得正半周期电压时,KD*P的相位延迟量为π/2,负半周期电压时,KD*P的相位延迟量为-π/2, 相机接收到的信号分别为S+=0.5I- 0.5V和S-=0.5I+ 0.5V,则V=S--S+。
(2)测量U时,将1/4波片移入,轴方位角θ旋转到0°,在KD*P上加交变的方波电压,使得正半周期电压时,KD*P的相位延迟量为π/2,负半周期电压时,KD*P的相位延迟量为-π/2,相机接收到的信号分别为S+=0.5I+ 0.5U和S-=0.5I- 0.5U,则U=S+-S-。
(3)测量Q时,将1/4波片移入,轴方位角θ旋转到45°,在KD*P上加交变的方波电压,使得正半周期电压时,KD*P的相位延迟量为π/2,负半周期电压时,KD*P的相位延迟量为-π/2,相机接收到的信号分别为S+=0.5I- 0.5Q和S-=0.5I+ 0.5Q,则Q=S--S+。
1.3 1 m太阳望远镜高分辨率磁像仪对数据采集的要求
1 m太阳望远镜高分辨率磁像仪对数据采 集的总体要求是在尽量短的时间内,磁场通道和白光通道需要同步采集大量的短曝光斑点图,KD*P调制状态变化对图像采集的影响最小,且能辨识对应的图像帧(无效帧)。详细的时间参数要求如表1。表中时间分辨率指完成一次斯托克斯参数(I,Q,U,V)测量的时间,是对偏振分析器调制速度和图像采集速度的要求;单帧曝光时间是指两个相机每帧短曝光斑点图的曝光时间;每秒采集帧数是斑点图的采集帧率(采集速度);异构图同步采集精度是指白光通道和磁场通道斑点图曝光时间的同步精度。
表11m太阳望远镜磁像仪对数据采集系统的基本要求
Table1BasicrequirementsofNVSTmagnetographfordataacquisitionsystem
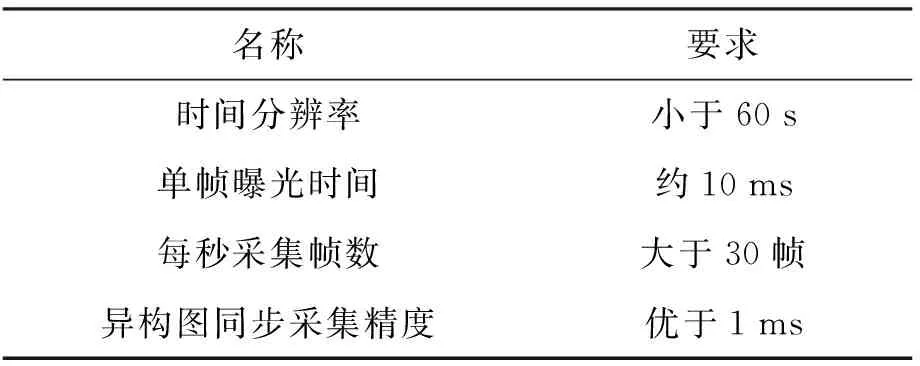
名称要求时间分辨率小于60s单帧曝光时间约10ms每秒采集帧数大于30帧异构图同步采集精度优于1ms
从KD*P偏振调制工作原理看出,对斯托克斯参数中的Q,U,V进行测量时,KD*P的相位延迟量需要在π/2和-π/2之间交替变化,即KD*P两端需要加1 000 V左右的方波电压,KD*P在π/2和-π/2每个稳定状态时,两通道的相机需要采集足够(400帧)的斑点图进行高分辨率统计重建,而且KD*P在π/2和-π/2之间跳变时,由于状态不稳定,必须丢弃对应帧的斑点图,这就要求两个同步工作的相机应与KD*P的调制状态保持严格的同步,即与其工作的高压方波保持同步。
因此,要满足1 m太阳望远镜高分辨率磁像仪对数据采集的要求,需要严格控制两台相机之间,以及相机与KD*P调制状态之间的同步。
2 时序控制系统总体设计
2.1 时序控制系统的总体设计及工作流程
为了满足同程异构对斑点图采集速度的要求,1 m太阳望远镜高分辨率磁像仪选用科学级的sCMOS相机,在Rolling曝光模式下,最高速度可以达到100帧/s。sCMOS相机提供多种触发工作模式,为了实现1 m太阳望远镜高分辨率磁像仪中两台sCMOS相机的每帧图像能精确同步曝光,并且能连续、高速采集短曝光斑点图,相机工作在Rolling模式,采用外触发启动,需要采集图像总帧数和每帧图像的曝光时间由采集程序事先设定。
由于KD*P工作电压是1 000 V左右的高压方波,为了实现高压与相机的同步工作,在设计KD*P的高压电源时,同时从KD*P输出级产生与高压方波频率和相位相同,而电压只有几伏的方波用于反馈控制。
根据系统要求、sCMOS相机特性和工作模式,以及KD*P高压电源结构,1 m太阳望远镜高分辨率磁像仪数据采集的时序控制设计如图3(a)。相机的图像采集与存储、曝光时间、工作模式以及采集总帧数通过图像采集计算机控制。中控计算机负责采集两个相机以及KD*P的工作状态,然后向两个相机发送同步外触发信号。相机、KD*P电源及IO控制卡之间电气特性不同,加入了相应的接口和驱动电路。
整个系统的工作流程如图3(b),中控机设置好KD*P的工作参数(频率和电压),图像采集计算机设置好相机的工作参数后,中控机通过IO口读取KD*P的调制状态和相机工作状态(就绪、曝光、停止),当两个相机都在就绪状态时,开始序列斑点图的采集。
2.2 系统工作时序及参数
KD*P状态切换时对应的斑点图需要根据KD*P频率、相机曝光时间和整个相机的工作模式之间的相互制约关系确定,这是整个系统的时序设计问题。理想情况下,系统的工作时序如图4,图中,T1+,T2+……TN+表示KD*P偏振调制为π/2时的状态,T1-,T2-……TN-表示KD*P偏振调制为-π/2时的状态,TN表示KD*P总的工作周期,N表示KD*P总的工作周期数,n表示一个KD*P调制状态(T+或T-)下序列斑点图的帧数,n不宜过大,10帧以下为好,这是因为n过大,一是导致获得的偏振信号S-和S+之间时间过长带来测量误差,二是KD*P晶体特性不允许长时间工作在直流状态。2Nn表示一次工作采集到的斑点图总帧数。由于KD*P调制状态周期性变化,第n,2n,3n,……,2Nn帧对应于KD*P调制状态切换时采集的图像,是无效帧,数据处理时要将这些帧剔除。
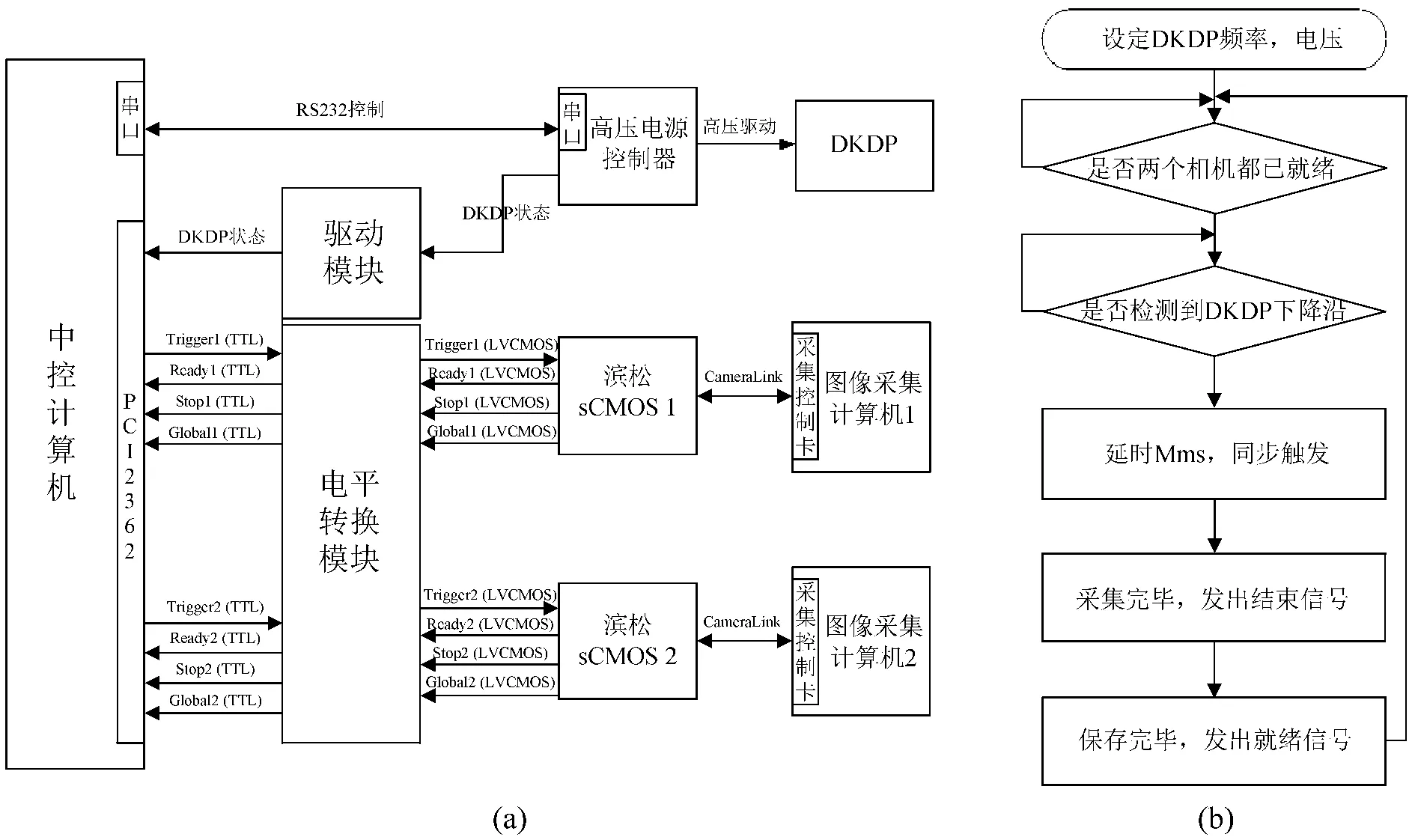
图3 (a) 1 m太阳望远镜高分辨率磁像仪数据采集时序控制系统; (b) 系统工作流程
Fig.3 (a) Data acquisition time sequence control system of NVST high resolution magnetograph; (b) System workflow

图4 数据采集系统理想工作时序
Fig.4 Ideal working sequence of data acquisition system
但是,两个相机的曝光模式、曝光时间长度、KD*P电压频率、高低电平的占空比、高压调制方波与低压反馈方波的一致性,以及外触发信号的稳定性、系统中各延时环节的时间稳定性、一次采集总图像帧数2Nn都影响系统的正常工作,致使废弃帧不规则出现,导致无法辨识无效帧。因此,实际工作时序要综合考虑以上因素,相比理想工作的时序要复杂得多,如图5。图中,t1表示KD*P工作高压与计算机采集的同步反馈低压时刻之间的时间延迟,这是由KD*P高压电源硬件系统以及软件的不实时造成的;t2为计算机采集KD*P同步反馈低压时刻到相机触发信号发出时刻的时间延迟;t3为触发信号发出到相机第1帧开始曝光时刻的时间延迟。t1,t2,t3的稳定性影响每次序列斑点图开始采集时的稳定性,即每次采集时,是否是第n帧对应KD*P第1次(T1+到T1-)调制状态的变化。相机的曝光时间te、KD*P的频率和占空比(即T+和T-)以及总曝光帧数2Nn决定后面图像的稳定性,也就是第2n,3n,……,2Nn是否为无效帧。
当相机工作在Rolling模式时,曝光从相机中心向两边逐行进行,如图6。
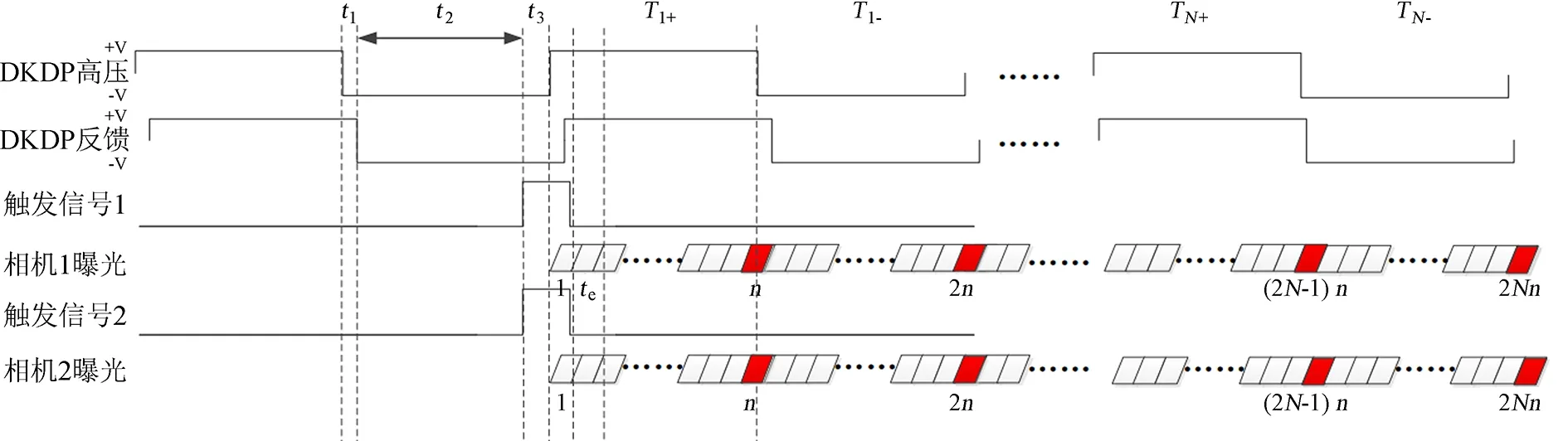
图5 数据采集系统实际工作时序
Fig.5 Actual working sequence of data acquisition system
对于数据采集系统采用的滨松C11440-22CU型sCMOS相机,像元2 K × 2 K,Rolling曝光模式下,后一行相对前一行延迟约10.0 μs,对于选用的2 K × 2 K相机,最后曝光的一行相对最开始曝光的一行延迟了约10.0 ms。如果曝光时间te小于10.0 ms,则KD*P调制状态变化时影响多帧图像,即无效帧为多帧,如果曝光时间te大于10.0 ms,则一帧图像中所有行都在曝光时间为tg=te-10.0 ms(图6)内,理想情况下,一次采集的序列斑点图中,应把KD*P所有调制状态变化对应在n,2n,3n,……,2Nn的tg时间内,即只影响一帧图像,因此tg越大越好,也就是斑点图的曝光时间te越大越好,但高分辨率图像统计重建中,斑点图曝光时间又最好小于或接近大气冻结时间(典型值为10 ms),因此,控制时序到达最完美的条件是在满足总斑点图帧数2Nn(800帧)的条件下te大于并越接近10.0 ms越好。
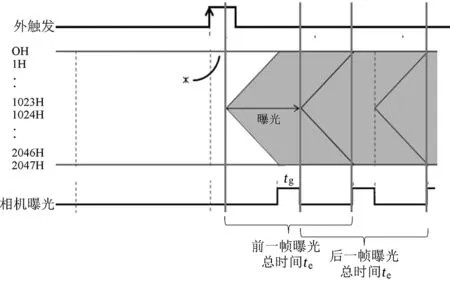
图6 sCMOS相机的外触发Rolling曝光模式
Fig.6 External trigger and Rolling exposure mode of the sCMOS camera
由于两个通道相机型号相同,工作模式相同,曝光能实现严格同步。让两台相机采用Rolling工作模式,单次外触发连续曝光800帧,利用示波器观察相机800帧输出波形,由于800帧同步采集输出信号较为密集,故仅仅贴出800帧中开始曝光与结束曝光的情况,实测结果如图7。因此,重点问题是两个相机与KD*P的偏振分析器的同步工作。

图7 800帧连续曝光两相机同步情况。(a) 开始曝光;(b) 结束曝光
Fig.7 800 frames continuous exposure of two cameras synchronously. (a) exposure start; (b) exposure end
设tdm表示第n,2n,3n,……,2Nn帧中tg时段的中间时刻与KD*P高压切换时刻的时间偏差(可正可负),单位为毫秒(ms)时,整个系统的时间精度需要满足关系式:
t1+t2+t3+
(2)
(3)
TN=mTdTNte=mtdten,mT,mt取正整数,
(4)
3 系统时间参数实测与分析
3.1 系统延时参数波动的实测
系统整体延时主要是从KD*P的调制高压状态变化时刻到相机第1帧曝光时刻的延迟,包括t1,t2,t3,这些参数的波动将影响所有的无效帧(t、2t、3t…… 2t)。
通过系统实验,设定KD*P高压工作电源和相机曝光时间,采用示波器并配合高压探头对t1,t2,t3进行测量,经过多次测量的结果如图8,其中横坐标为测量次数。最大值、最小值、平均值、P-V各参数的统计如表2。

图8 系统整体延时参数稳定性
Fig.8 Stability of the overall delay parameter of the system
通过测量,t1对应的时间波动的P-V值t1为84 μs,t2对应的时间波动的P-V值t2为48.2 μs,t3对应的时间波动的P-V值t3为32.4 μs,t1,t2,t3时间延迟的P-V值总和t1+t2+t3为164.6 μs。
3.2 KD*P时间特性参数实测

表2系统整体延时参数统计值
Table2Statisticsoftotaldelayparametersofthesystem
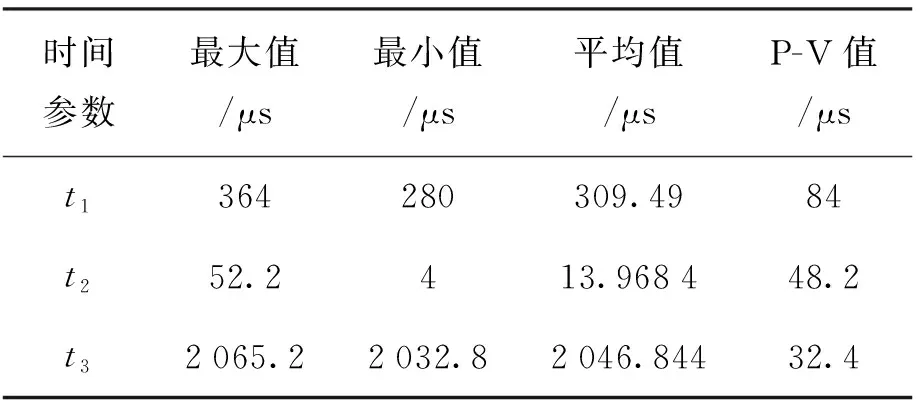
时间参数最大值/μs最小值/μs平均值/μsP-V值/μst1364280309.4984t252.2413.968448.2t32065.22032.82046.84432.4
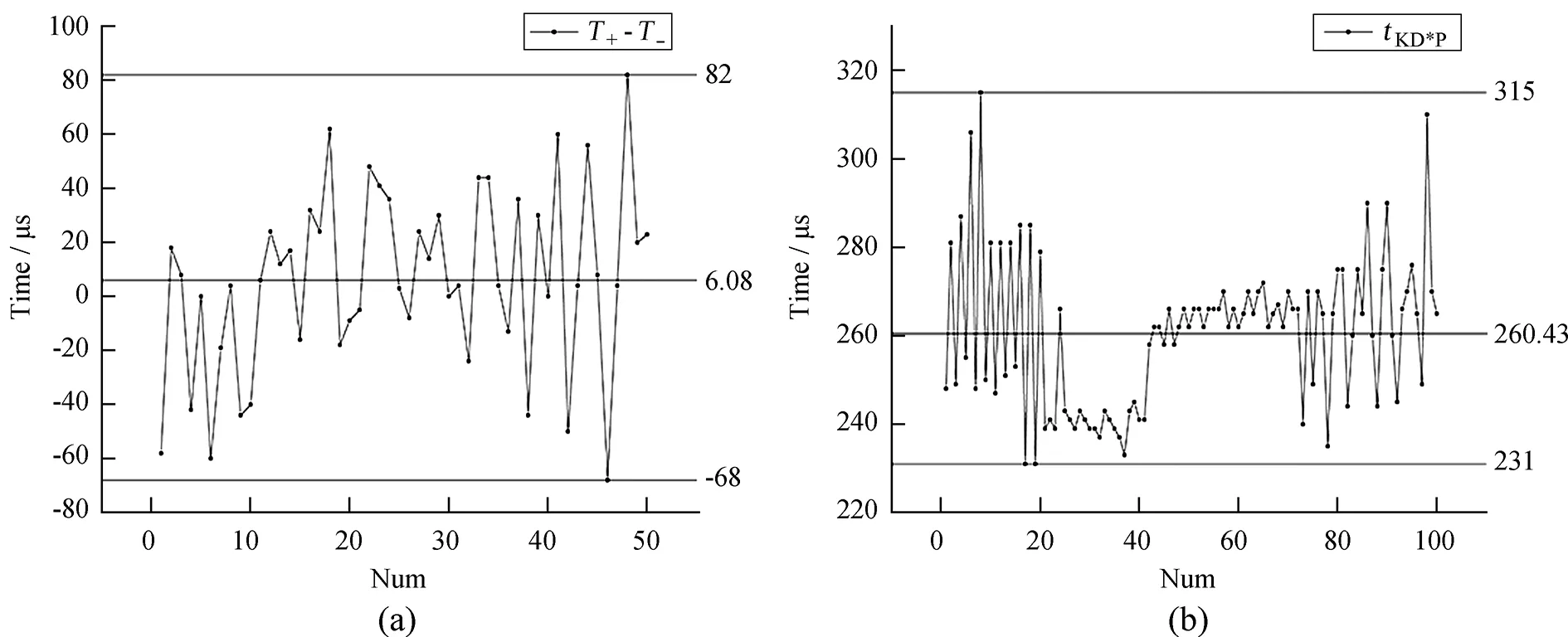
图9 (a) KD*P占空比情况;(b) KD*P高压上升下降时间
Fig.9 (a) Duty cycle of KD*P; (b) Rise and fall time of KD*P high voltage
4 不同参数模式下的时序控制实验
根据系统延迟和KD*P高压电源时间参数的实测值,统一公式量纲为毫秒(ms),代入时序关系(2)、(3)、(4)式得
(5)
N|TN-2×n×te|=0,
(6)
TN=mTdTNte=mtdten,mT,mt取正整数,
(7)
根据图3建立的时序控制系统,在满足时序条件(5)、(6)、(7)式的情况下,开展了不同n,te的相关实验。由于示波器显示800帧相机输出会略显拥挤,以及开始触发后各个周期匹配效果都能够达到磁像仪对数据采集系统的要求,故以上多种工作模式实验结果仅仅展示实验数据的首个KD*P周期与末个KD*P周期,用来表示该工作模式能够很好地实现800帧数据采集。
(1)当n=10时,满足(5)、(6)、(7)式te的最小取值为10.96 ms,TN取值为219.2 ms。实测的时序如图10。
图10n=10,te=10.96 ms时同步采集时序。(a) 首个KD*P周期;(b) 末个kD*P周期
Fig.10 Whenn=10,te=10.96ms, the timing sequence of synchronization acquisition.
(a) the first cycle of KD*P; (b) the last cycle of KD*P
(2)当n=5时,满足(5)、(6)、(7)式te的最小取值为10.96 ms,TN取值为109.6 ms。实测的时序如图11。

图11n=5,te=10.96 ms时同步采集时序。(a) 首个KD*P周期;(b) 末个KD*P周期
Fig.11 Whenn=5,te=10.96ms, the timing sequence of synchronization acquisition. (a) the first cycle of KD*P; (b) the last cycle of KD*P
(3)当n=5时,te非最小,取值为15 ms,TN取值为150 ms。实测的时序如图12。

图12n=5,te=15 ms时同步采集时序。(a) 首个KD*P周期;(b) 末个KD*P周期
Fig.12 Whenn=5,te=15ms, the timing sequence of synchronization acquisition.
(a) the first cycle of KD*P; (b) the last cycle of KD*P
在不同的实验条件下,对工作时序进行了实测,得到如下结论:
(1)同程异构中的磁场通道与同步通道两个相机能同步工作,序列斑点图的曝光时间严格对齐。
(2)两个相机序列斑点图的所有无效帧能严格对应KD*P的状态变化,而且每个状态变化只有一帧无效帧,即KD*P高压切换的过程均对应无效帧的高电平时刻。
(3)时序系统正常工作时,斑点图的最小曝光时间为10.96 ms,满足高分辨率图像统计重建对曝光时间的要求。
5 总 结
根据1 m太阳望远镜高分辨率磁像仪对数据采集系统的需求,根据KD*P偏振调制特性、同程异构以及图像采集相机Rolling曝光和外触发工作的特点,设计了满足数据采集的同步时序控制系统。通过系统各时间参数的详细测试与分析,得到了满足时序系统同步工作的参数设置条件。最后实测了几种模式下系统的工作时序,表明所设计的时序控制系统能满足1 m太阳望远镜高分辨率磁像仪对数据采集系统的需求。
猜你喜欢
新作文·小学低年级版(2022年3期)2022-08-30
智慧少年·故事叮当(2021年5期)2021-08-23
潍坊学院学报(2021年6期)2021-07-22
中国惯性技术学报(2020年2期)2020-07-24
雷达学报(2020年3期)2020-07-13
电子制作(2019年12期)2019-07-16
智能物联技术(2018年3期)2019-01-10
今日农业(2019年15期)2019-01-03
太空探索(2015年8期)2015-07-18
浙江大学学报(工学版)(2015年1期)2015-03-01