
基于FIRA仿真的足球机器人预判圆弧射门算法设计
2018-10-10 05:12:42林金珠倪天伟
长春工程学院学报(自然科学版) 2018年3期
林金珠,袁 驰,倪天伟
(河海大学文天学院电气信息工程系,安徽 马鞍山 243031)
0 引言
在FIRA仿真足球机器人比赛中,策略的执行、阵型的变换、路径的规划等都是比赛的关键,而射门则是终结比赛的重中之重,在整场比赛中射门动作至关重要,射门能力是决定一支球队实力的关键因素[1-2]。文献[3]引入基于中位线的传球方法,将机器人的足球动作作为机器人的行为来设计,算法结构简单,通俗易懂,但是受足球机器人初始姿态的影响较大。文献[4-5]提出了一种改进的射门算法,机器人先沿直线运动靠近球,然后沿曲线运动去撞球射门,该算法优化了射门路线,实用性强,但机器人在运动到目标点附近时调整左右轮转速,踢球射门,容易被断球或被守门员阻截,不利于提高进攻效率,尤其在点球大战中,射门算法易被对方看破,点球得分率低[6]。为此,本文提出了一种基于FIRA仿真的足球机器人预判圆弧射门算法,该算法利用预测球的运动方向与无干扰情况下实时姿态的相对位置,规划出圆弧射门轨迹,提前到达预定目标点,调整并完成快速射门动作。经仿真实验证明,该算法加快了射门的节奏,有效提高了射门的成功率。
1 预判圆弧射门算法
1.1 算法思想
在FIRA仿真足球机器人比赛中,机器人行驶速度快从而攻防节奏快,使得分机会稍纵即逝,特别是突破后的射门和点球,是比赛中得分的关键。如何提高射门效率是一直以来的研究问题,其中,提高射门速度、精度和可变性是提高射门效率的关键。预判圆弧射门是指利用计算机系统先预判出球下一时刻到达的位置,或到达某一位置所需的时间,再计算出合适的射门点,此时,机器人以平滑的圆弧移动,边行驶边调整位姿,行至目标点时刚好达到可射门状态,立即射门。预判圆弧射门算法可以使机器人动作连贯,快速到达攻击点,既可完成高质量射门,又能利用预判的时间做出细微调整,改变射门角度,达到出其不意的变化效果。其中,弧形的路径规划可让机器人最大限度地保持平稳,无拐点,可减少调整时间,从而保持最大速度,使得射门能量最大化,保证射门的成功率。
1.2 预判的实现
在FIRA仿真平台中,首先需要计算球在正常运动时的加速度α,如式(1)所示,可认为环境中摩擦因数alpha是不变的,所以,此时的α也是恒定的,FIRA仿真平台中数据以60次/s的速度进行交换,可由式(2)得到下一时刻球移动的距离d。
(1)
式中:Δv为速度的变化量;Δt为发生这一变化所用时间。
d=(α*t*t)/2,
(2)
式中t为时间。假定,小球的t1和t2时刻的坐标分别为:(x1,y1),(x2,y2),则计算小球的位移Δx=x1-x2和Δy=y1-y2。
得出小球的偏转角theta,即小球运动方向,如式(3)所示。
theta=(int)(180.0/PI*atan2((double)dy,(double)dx)),
(3)
通过得到的运动方向与距离,可以预判出球在无干扰的情况下下一时刻所达到的位置,通过这些计算出小球到达某点的运动时间,得出周围最佳射门机器人与应到达的射门点,从而做出提前跑位动作和提前调整的技术动作。
2 算法实现
图1为小车圆弧射门模型机器人,小车的运动、转向、旋转都由小车左右轮速控制,当通过小球的速度方向等信息反馈得到范围内最适宜动作的小车后,由于小车的速度在-127~127内,可计算出最佳射门点与位姿,得出射门点到达的时间t,从而有左右轮速使小车按照圆弧轨迹运动,到达射门点时,机器人小车的运动角度与期望射门角度刚好一致,击球完成射门。

图1 机器人小车圆弧射门模型
其中,弧线部分为机器人小车运动轨迹,是以车、球的撞击点为端点,以射门目标方向为切线的圆弧,射门目标轨迹如粗线部分。因为左右轮距已知为D,两轮行驶路径为同心圆弧,两圆弧半径已知为R1、R2,则可由此得到左右轮速差V。算法执行流程如图2所示。
3 仿真结果与分析
文本通过FIRA SimuroSot 5vs5仿真平台进行了仿真实验,该平台中的赛场尺寸为1 130像素×788像素,移动机器人为10像素×10像素的正方形,用高尔夫球作比赛用球,直径为5像素。通过仿真实验模拟球临近大禁区附近时,移动机器人采取适当应对机制,发生射门动作。在正常的进攻中,未采用预判圆弧射门算法的射门动作效果如图3所示,采用预判圆弧射门算法的射门动作效果如图4所示。

图2 算法执行流程图

图3 传统的射门动作效果
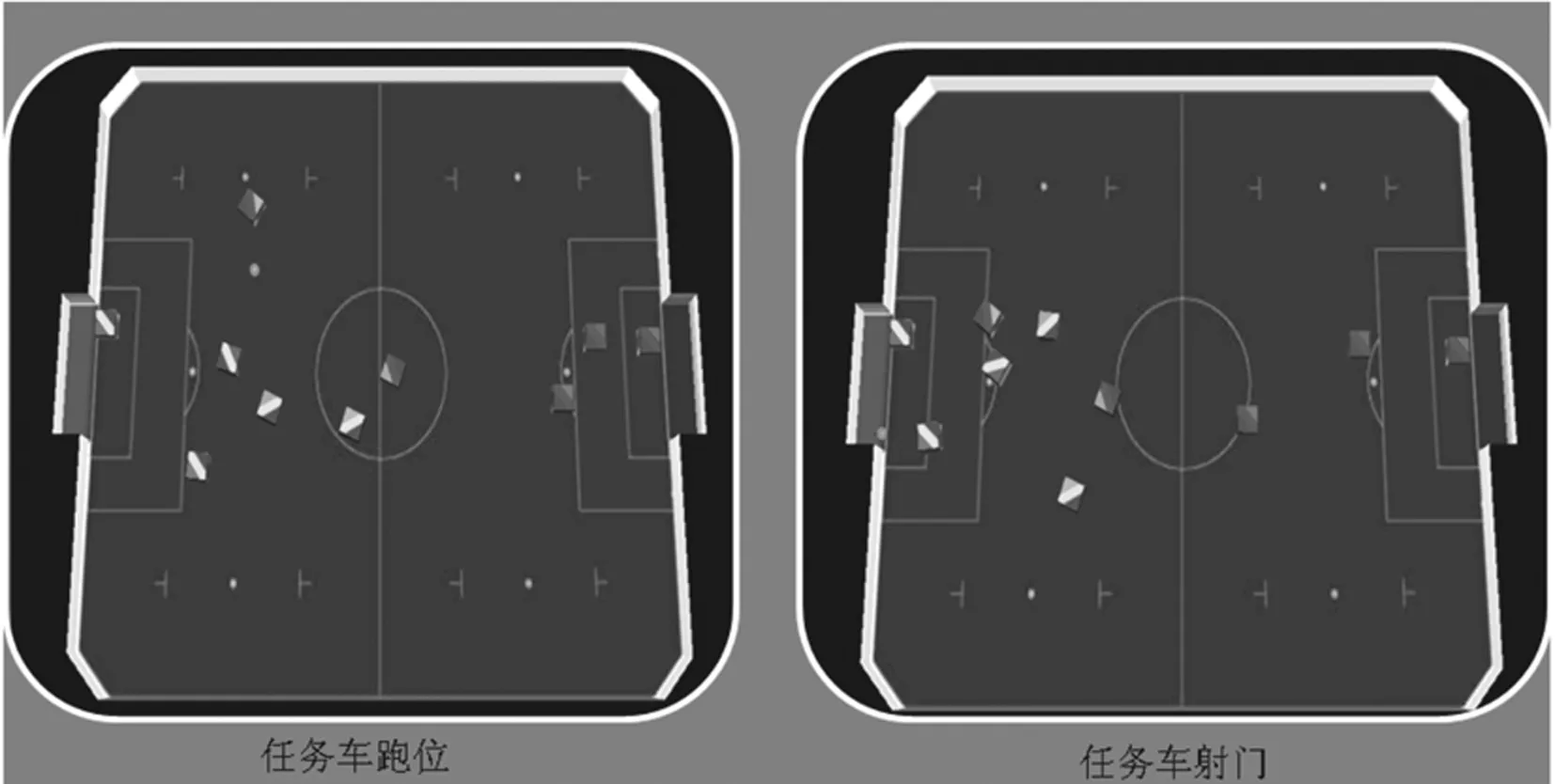
图4 采用预判圆弧射门算法的射门动作效果
两种射门动作从任务车启动至射门的完成时间(s)与进球数对比见表1。在点球动作中,传统点球和轻推小球到达一定角度再应用预判圆弧射门算法,设每种情况踢10次的进球数量与得分率的对比数据见表2。
由此可见,基于FIRA仿真足球机器人的预判圆弧射门算法在一定程度上提高了射门速度,超前于小球进行跑位,从而有更多的时间用于运算和调整位姿,提升了实战中的预判能力,大大提高了射门的成功率。

表1 两种射门算法的完成时间(s)与进球数对比

表2 两种射门算法在点球中进球数量和得分率的对比
4 结语
本文提出了一种基于FIRA仿真足球机器人的预判圆弧射门算法,不仅考虑了机器人的当前状态,也能计算到达目标点的速度和方向,预判下一状态,当机器人运动角度与期望射门角度一致时,机器人立即击球完成射门。该算法能很好地提高进攻端的
进攻效率,适合对已有攻防体系做出优化,提升空间大,本文给出的一些思路和代码适合借鉴,预判思想也适合用在防守和路径规划等方面。
猜你喜欢
数学小灵通(1-2年级)(2023年8期)2023-08-24 06:05:00
校园足球(2022年9期)2022-03-15 02:10:06
进出口经理人(2021年8期)2021-02-12 02:25:52
出版人(2020年5期)2020-11-17 01:45:18
体育风尚(2019年1期)2019-09-10 07:22:44
今日农业(2019年14期)2019-01-04 08:57:40
意林·全彩Color(2018年9期)2018-10-12 01:07:02
小雪花·小学生快乐作文(2016年4期)2016-05-14 10:13:19
中国卫生(2014年3期)2014-11-12 13:18:14
体育科技(2011年4期)2011-01-02 00:59:24
