路面和开关磁阻电机作用下电动汽车振动分析
2018-10-09 06:08李杰高雄王培德张振伟
湖南大学学报·自然科学版 2018年8期
李杰 高雄 王培德 张振伟

摘 要:为了分析开关磁电机驱动电动汽车振动性能,基于前轮和后轮路面激励的时间相关性,应用滤波白噪声法描述前轮和后轮路面激励,基于线性模型描述开关磁阻电机垂向激励,采用六自由度汽车振动平面系统描述轮毂电机驱动电动汽车振动.在城市行驶工况的B级路面和车速范围内,对路面和开关磁阻电机作用下电动汽车振动性能进行了研究.研究结果表明,在前轮和后轮电机存在同向偏心的情况下,低速对车轮加速度和车轮动载荷影响大,高速对座椅加速度和悬架动挠度影响大.
关键词:电动汽车;振动;路面;开关磁阻电机;汽车振动平面系统
中图分类号:U469.72 文献标志码:A
Abstract:To analyze vibration performance of electric vehicle with switched reluctance motor, a filter white noise method was used to describe the road excitations of front wheel and rear wheel based on time correlation between front wheel and rear wheel. A linear model was applied to describe the vertical excitation of switched reluctance motor, and inwheel motor electric vehicle vibration was determined by a six degree of freedom plane system of vehicle. In the urban driving situation of B grade road and speed range, electric vehicle vibration was studied by simulation analysis under the action of road and switched reluctance motor. The results show that low speed has a big influence on the wheel accelerations and wheel dynamic load, while high speed has a great influence on seat accelerations and suspension dynamic deflections under the presence of the same directional motor eccentricity condition of the front wheel and rear wheel.
Key words:electric vehicles;vibration;road;switched reluctance motor;automotive vibration plane system
作為电动汽车的一种形式,轮毂电机驱动电动汽车将电机嵌入到轮毂内[1-3],是结构布置最简单和传动效率最高的电动汽车,受到广泛关注[4-7].
目前,在轮毂电机驱动电动汽车应用的轮毂电
机中,开关磁阻电机具有成本低、调速范围宽的优点,适合应用在电动汽车上.但是,与其他轮毂电机相比,开关磁阻电机的缺点是存在转矩波动引起振动和噪声较大的问题[8-10].
当将开关磁阻电机嵌入到轮毂内时,电机产生的激励将直接作用在车轮上,引起电动汽车振动,从而影响电动汽车的舒适性和安全性.因此,研究开关磁阻电机激励,能够促进其在电动汽车上的广泛应用.
以往研究多从电机设计及其控制方面考虑开关磁阻电机振动问题[11],仅有少量研究从电机应用方面开展开关磁阻电机激励及其对电动汽车振动影响的分析[12-14],这些研究具有基础性.但是,这些研究仅考虑了电机单相转子多相过程的电机激励,没有考虑电机多相转子多相过程的电机激励;仅考虑了静止不动时电机对汽车振动的影响,没有考虑行驶时路面和电机作为联合激励对电动汽车振动的影响,具有局限性.
为解决上述问题,在前人研究工作基础上,本文应用滤波白噪声描述前轮和后轮路面激励,使用线性模型描述开关磁阻电机激励,采用六自由度汽车振动平面系统描述轮毂电机驱动电动汽车振动,确定对应的振动性能指标,以路面和电机作为联合激励分析它们对电动汽车振动的影响,为开关磁阻电机驱动电动汽车振动性能的改善、优化和控制研究奠定基础.
1 前轮和后轮路面激励描述
1.1 路面激励功率谱密度表示
2 开关磁阻电机垂向激励描述
2.1 电机组成和作用过程
典型开关磁阻电机为四相8/6极的结构,由定子、转子、绕组和开关电路等组成,如图1所示,其中仅画出一组开关电路.
定子外圆均布8个凸极,每个凸极上安装有单极绕组,相对的定子两个单极绕组串联,称为单相绕组;转子内圆均布6个凸极,每个凸极称为单相转子.
单机作用的完整过程为:
1)当单相转子向单相绕组靠近时,电流通过单相绕组,沿着磁阻最小的路径磁通闭合,转子与定子产生电磁作用的过程,称为单相转子单相过程;
2)单相转子与所有单相绕组电磁作用的过程,称为单相转子多相过程;
3)所有单相转子与所有单相绕组电磁作用的过程,称为多相转子多相过程.
2.2 单相转子单相过程电机激励与转子转角的关系
为描述开关磁阻电机的运动过程,引入如下线性假设[12-14]:
1)忽略功率损耗、磁通边缘效应和磁路非线性;
2)相变换瞬时完成;
3)电机恒速运行,电流为常数.
单相转子单相过程中,电机完成一个转子与一个定子的电磁作用过程,产生的电机激励为单相转子单相过程的切向力和径向力.
2.5 多相转子多相过程电机垂向激励与时间的关系
为了分析方便,设基准为水平轴,初始时刻将四相8/6极开关磁阻电机靠近水平轴的定子单级绕组标识为A极,按照逆时针方向将其后3个单极绕组分别标识为B、C和D极,与A、B、C和D极相对的单级绕组分别标识为 A ′、 B ′、 C ′和 D ′极,如图2所示.
初始时刻,设与A极作用的转子为a相.按逆时针方向,其后两个转子分别为b和c相,与a、b、c相相对的转子分别为a′、 b′、c′相.
在确定各定子绕组对应的初相位角后,需要确定各相转子在初始时刻的位置θint .初始时刻,各相转子的初始位置θint 如表2所示.
2.6 偏心情况定子和转子的最小气隙
理想情况是指定子和转子的圆心重合,不存在偏心的问题.实际中,由于加工、制造和装配误差,定子和转子之间会存在一定的偏心,即定子和转子圆心不重合.
由于电机径向力较大,而且垂直方向偏心导致的径向力不平衡力较大[12].因此,为了简化分析,选择最小气隙位置静态不变和垂直径向偏心的情况研究偏心对电机激励的影响.
在式(17)中,如果让e=0,则b=R-r,它为理想情况下定子和转子的最小气隙,是恒定值,由此说明偏心时最小气隙表示的正确性.
将各极定子的初始位置代入式(17),得到电机各极定子和转子的最小气隙.将考虑偏心后的各极定子和转子最小气隙代入式(15)和式(16)中,就得到电机垂向激励.
3 电动汽车振动模型
3.1 六自由度振动平面系统
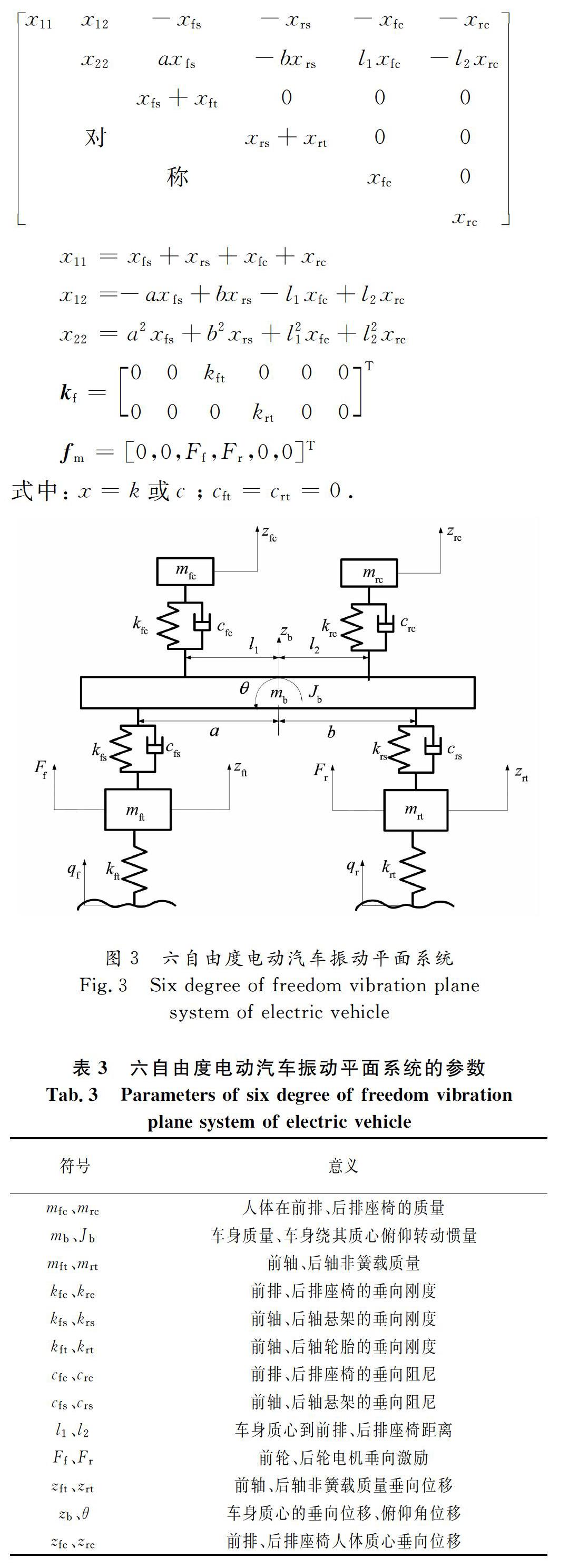
基于汽车左右对称、平面、多刚体、线性、接地点接触和电机刚性安装轮毂上假设,建立六自由度轮毂电机驱动电动汽车振动平面系统,如图3所示.图3中的参数见表3.
3.2 振动性能指标及其确定
六自由度汽车振动平面系统的振动响应量由前座椅加速度fc、后座椅加速度rc、前悬架动挠度ffd、后悬架动挠度frd、前轮动载荷Ffd、后轮动载荷Frd组成.
电机引入轮毂后,会对电机造成一定的影响.分析轮毂电机驱动电动汽车振动时,除了上述振动响应量外,补充前轮加速度ft、后轮加速度rt作为振动响应量.
对式(5)和式(6)采用时域积分方法,可以得到各个时刻的路面激励qf和qr;由式(15)和式(16),可以确定各个时刻的电机垂直激励Ff和Fr;将路面激励和电机垂直激励代入式(18),可以得到右端激励kfq+fm;对式(18)采用时域积分方法,可以得到各个时刻的位移z、速度和加速度;由此可以得到座椅加速度和车轮加速度,再由式(19)和式(20),可以得到悬架动挠度和车轮动载荷.
求得每个振动响应量后,采用每个量的均方根值作为振动性能指标.
4 电动汽车振动性能分析
4.1 分析方案
基于前面的理論分析,采用Matlab/Simulink开发了基于六自由度汽车振动平面系统的开关磁阻电机驱动电动汽车振动性能仿真软件.采用四相8/6级开关磁阻电机的某电动汽车作为研究对象,在定子和转子垂直偏心率10%情况下对轮毂电机驱动汽车振动性能进行仿真.首先,对路面和电机激励进行仿真.然后,对路面和电机联合激励下开关磁阻电机驱动电动汽车的振动性能进行仿真.
4.2 路面和电机激励的仿真
在B级路面和10 m/s车速工况下,前轮和后轮路面激励仿真结果如图4所示.同样工况下,定子和转子无偏心的理想情况和垂直偏心率10%情况下的电机激励如图5所示.
由图5可以看出,在理想情况下,电机的整体垂向激励为零,说明电机的定子和转子无偏心的理想情况电机不产生激励,验证了电机激励模型的正确性;在垂直偏心率为10%的情况下,电机垂向激励呈周期性变化,由于电机垂直向上偏心,因此,电机垂向激励方向为垂直向下.
4.3 前后轮电机同向偏心下的振动仿真
取B级路面,车速以5 km/h的增量从5 km/h变化到80 km/h,再现城市的普通和高架道路行驶工况;考虑电机转子相对定子绕组垂直向上偏心作为前、后轮毂电机的偏心形式,电机偏心率取10%,研究路面和电机联合激励作用下对电动汽车振动性能的影响.
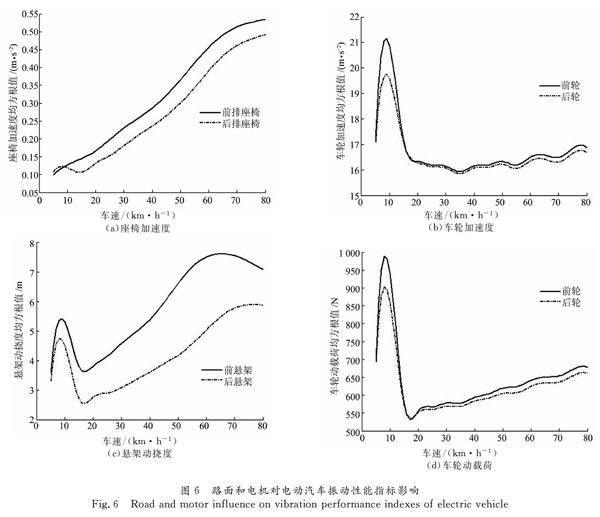
不同车速时前轮和后轮电机同向偏心下各响应量均方根值如图6所示.
由图6可以看出,路面和电机的联合激励作用,对前面振动性能指标的影响要大于对后面振动性能指标的影响;随着车速的增加,座椅加速度增加;随车速的增加,车轮加速度、悬架动挠度和车轮动载荷呈现增加、下降、再增加的变化规律,只是各个量的变化程度不同,而且在10 km/h时共同达到第一个峰值.
路面和电机的联合激励作用下,出现前面振动性能指标大于后面振动性能指标的现象,一方面,所研究的电动汽车为轿车,虽然发动机舱内不再安装发动机,但是安装了动力电池,导致传统汽车和电动汽车前面的质量分布相似;另一方面,在轿车设计时,前面的质量分布大于后面的质量分布,以便后面在行李舱放置物品时,实现前面和后面质量分布平衡.正常行驶时一般不考虑行李舱放置物品,由此导致无论是静止还是行驶的情况下前轴轴荷大于后轴轴荷,进一步造成前面的振动性能指标在一定程度上大于后面的振动性能指标.
电机设计追求的目标是等功率输出,速度低输出就大,反之,速度高输出小.正是由于这一特性,一方面,导致电机激励低速时大,高速时小.另一方面,低速时汽车刚起步,与电机激励相比,路面激励影响相对要小.因此,10 km/h车轮加速度、悬架动挠度和车轮动载荷共同达到第一个峰值.而对于座椅加速度,距离电机存在悬架和座椅两级隔振和减振系统,再加上前轮和后轮的电机激励垂向向上,具有相互抵消的作用,由此受电机激励影响相对较小.
5 结 论
针对开关磁阻电机驱动电动汽车振动问题,建立了前轮和后轮路面激励的滤波白噪声模型、开关磁阻电机垂向激励的线性模型和轮毂电机驱动电动汽车的振动模型,考虑了行驶时路面和电机两种激励,确定了振动性能指标,通过仿真分析了路面和电机对开关磁阻电机驱动电动汽车振动的影响.
研究结果表明,在开关磁阻电机因制造、装配和使用导致的定子和转子偏心的情况下,开关磁阻电机驱动电动汽车会受到路面和电机的联合激励作用;在城市行驶工况的B级路面和车速范围的情况下,座椅加速度、车轮加速度、悬架动挠度和车轮动载荷受车速影响较大;当车速为10 km/h以下时,车轮加速度和车轮动载荷达到最大值,悬架动挠度达到第一个峰值;当车速为60~80 km/h时,座椅加速度和悬架动挠度达到最大值.
参考文献
[1] BICEK M,KUNC R,ZUPAN S.Mechanical impact on inwheel motors performance[J].Journal of Mechanics,2017,33(5):607-618.
[2] OKSUZTEPE E.Inwheel switched reluctance motor design for electric vehicles by using a paretobased multiobjective differential evolution algorithm[J].IEEE Transaction on Vehicular Technology,2017,66(6):4707-4715.
[3] 陈龙,董红亮,李利明.适合轮毂电机驱动的新型悬架系统设计[J].振动与冲击,2015,34(8):174-190.
CHEN L,DONG H L,LI L M.A new type suspension design suitable for an inwheel motor driving system[J].Journal of Vibration and Shock,2015,34(8):174-190.(In Chinese)
[4] 陈长征,王刚,于慎波.含输入时滞的电动汽车悬架系统有限频域振动控制的研究[J].振动与冲击,2016,35(11):130-136.
CHEN C Z,WANG G,YU S B.Finite frequency domain vibration control for suspension system of electric vehicle with actuator input delay[J].Journal of Vibration and Shock,2016,35(11):130-136.(In Chinese)
[5] 童炜,侯之超.轮毂驱动电动汽车垂向特性与电机振动分析[J].汽车工程,2014,36(4):398-403,425.
TONG W,HOU Z C.Analyses on the vertical characteristics and motor vibration of an electric vehicle with motorinwheel drive[J].Automotive Engineering,2014,36(4):398-403,425.(In Chinese)
[6] 靳彪,張欣,彭之川,等.四轮轮毂电机驱动电动汽车建模与仿真 [J].中国公路学报,2016,29(4):138-144.
JIN B,ZHANG X,PENG Z C,et al.Four hubmotorin wheels drive electric vehicle modeling and simulation[J].China Journal of Highway and Transport,2016,29(4):138-144.(In Chinese)
[7] 宋传学,肖峰,刘思含,等.基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测[J].吉林大学学报(工学版),2016,46(2):333-339.
SONG C X,XIAO F,LIU S H,et al.State estimation of electric vehicle with inwheel motors based on UKF[J].Journal of Jilin University(Engineering Edition),2016,46(2):333-339.(In Chinese)
[8] GUO X Q,ZHONG R,ZHAO L P,et al.Method for radial vibration modeling in switched reluctance motor[J].IET Electric Power Applications,2016,10(9):834-842.
[9] 钟银辉,李以农,杨超,等.基于主动悬架控制轮边驱动电动车垂向振动研究[J].振动与冲击,2017,36(11):242-247.
ZHONG R H,LI Y N,YANG C,et al.Vertical vibration inwheel motor electric vehicles based on active suspension control[J].Journal of Vibration and Shock,2017,36(11):242-247.(In Chinese)
[10]李勇,徐兴,孙晓东,等.轮毂电机驱动技术研究概况及发展综述[J].电机与控制应用,2017,44(6):1-7.
LI Y,XU X,SUN X D,et al.Review and future development of inwheel motor drive technology[J].Electric Machines & Control Application,2017,44(6):1-7.(In Chinese)
[11]PENIAK A,MAKAROVIC J,RAFAJDUS P,et al.Design and optimization of switched reluctance motor for electric vehicle[J]. Electrical Engineering,2017,99(4):1393-1401.
[12]薛玉春,张义民,贺向东.电动汽车的开关磁阻电动机驱动及其系统激振仿真[J].中国机械工程,2007,18(11):1378-1382.
XUE Y C,ZHANG Y M,HE X D.Simulation research on vibration of SRM driving on electric vehicle[J].China Mechanical Engineering,2007,18(11):1378-1382.(In Chinese)
[13]張义民,薛玉春,贺向东,等.基于开关磁阻电机驱动系统的电动汽车振动研究[J].汽车工程,2007,29(1):46-49.
ZHANG Y M,XUE Y C,HE X D,et al.A research on the vibration of an electric vehicle using switched reluctance motor as drive dystem[J].Automotive Engineering,2007,29(1):46-49.(In Chinese)
[14]薛玉春,张义民,贺向东.电动汽车开关磁阻电机的激振力研究[J].农业机械学报,2008,39(2):25-29,19.
XUE Y C,ZHANG Y M,HE X D.Research on excitation of SR Motor on electric vehicle[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(2):25-29,19.(In Chinese)
[15]赵旗,王维,李杰,等.基于滤波白噪声的汽车平顺性时域建模和仿真[J].科学技术与工程,2016,16(27):283-287.
ZHAO Q,WANG W,LI J,et al.Modeling and simulation of time domain for automotive ride comfort based on a filtered white noise [J].Science Technology and Engineering,2016,16(27):283-287.(In Chinese)
[16]余志生.汽车理论[M].北京:机械工业出版社,2010:207.
YU Z S.Automobile theory[M].Beijing:China Machine Press,2010:207.(In Chinese)
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
西部交通科技(2021年9期)2021-01-11
天天爱科学(2020年6期)2020-09-10
语文世界(小学版)(2017年11期)2018-01-02
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10
爆笑show(2015年5期)2015-07-09
数字家庭(2009年3期)2009-06-23
物理教学探讨(2009年2期)2009-03-30
中学生数理化·高二版(2008年9期)2008-06-17