四国联合体的优势技术和成果
——俄罗斯无人移动科学与技术公司(RCL)篇
2018-09-27 08:49冯石柱
机器人技术与应用 2018年4期
冯石柱
(中国北方车辆研究所,北京,100072)
1 公司简介
俄罗斯无人移动科学与技术公司(Russian Innovate Science&Technology Rover Company Ltd,简称RCL)是全俄车辆研究所参股公司,成立于1992年,由俄罗斯移动机器人和空间机器人领域的15位著名科学家和设计师牵头组建。
RCL是俄罗斯宇航联合会的团体成员单位,也是俄罗斯开发空间和地面机器人移动系统的单位。RCL在星球车以及轻小型特种作业机器人总体设计、构型设计、轻小型机构设计、集成轻量化设计、特殊环境下的部件密封润滑技术、多轮协调控制技术、驱动控制技术、远程通信技术、遥操作技术、移动系统性能评估等方面积累了丰富的经验,有一套标准的设计规范与知识库,能够根据用户需求,进行快速开发与工程实现。
RCL目前拥有100多项智能移动技术专利和多款实物产品,曾作为主要研发方参与俄罗斯登月计划、俄罗斯军用无人平台计划、无人系统技术标准及体系架构制定,为前苏联月球车-1、月球车-2、火星漫步者-M71/M94 /M96、火卫1-86、切尔诺贝利清污机器人等开发行走系统。进入21世纪后,随着月球以及火星探测的不断升温,该公司为欧洲航天局以及法国、芬兰、印度等国设计了多款月球车和火星车,如极地漫游者、赛艇机器人、球形机器人、Jrovers,IARES、LRMC、工作伙伴平台和机械手、RoSA-2 漫游者、ExoMaDeR漫游者等。RCL主要设计的项目见图1。

图1 RCL参与的项目
2 RCL优势技术及成果
2.1 设计队伍
图2是创办RCL的3位著名科学家,居中的是RCL总经理亚历山大·基穆尔丹(Alexander Kemurdjian)教授,他不仅是俄罗斯宇航科学院院士,还是苏联首台无人驾驶月面自动车底盘的首席设计师。其他两位是俄罗斯移动机器人和空间机器人领域著名科学家和设计师。
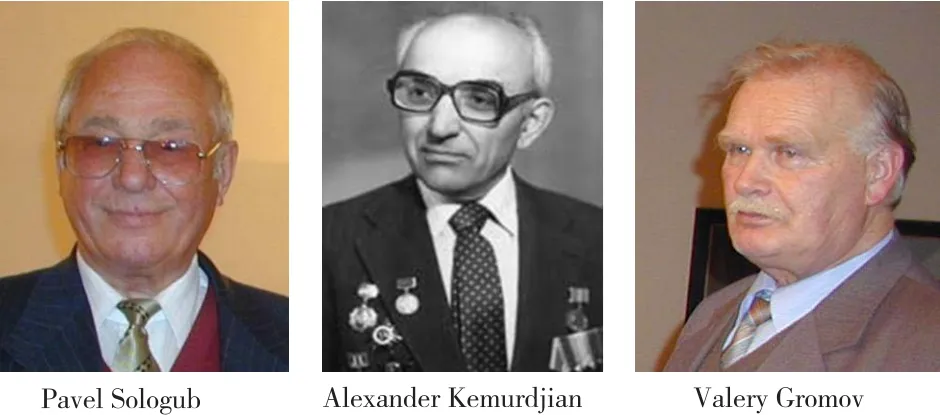
图2 创办RCL的3位著名科学家
图3 所示的为RCL机器人专家,其中,乌拉基米尔·库切连科(Vladimir Kucherenko)教授在轻小型特种作业机器人车辆总体设计、构型设计、轻小型机构结构设计、集成轻量化设计、驱动控制技术、移动性能试验测试评估等方面积累了丰富经验,已成功开发出多款具有国际影响力的移动构型,特别是星球车移动构型具有良好的通过性和稳定性,在移动装置技术及设计方法上具备国际领先水平。他提出了开发相应行动、驱动、传动、悬挂的相应分析及设计方法,如防沉陷分析与设计方法、功率需求计算方法、稳定性计算与调节方法、通过性与运动失效计算方法等,这些技术和方法可以直接用于作战移动机器人和地面无人平台,并为混合动力车辆和全电站车等新型军事装备所借鉴,可显著提高装备的稳定性和机动能力,适应野外作战环境的苛刻要求。此外,库切连科教授还具备丰富的基于轮壤力学基础的多自由度高适应性行驶机构的运动学及动力学建模方法与经验。
谢尔盖·马特洛索夫( Serguei Matrossov)博士现担任RCL的CEO,主要从事移动机器人及星球探测器研究,师从格罗莫夫(Valery Gromov) 教授。谢尔盖·马特洛索夫博士参加了M94/96火星项目俄罗斯火星车、DLR/ESA的MP-1 和MP-2 等众多项目,发表了40多篇学术论文,并获得俄罗斯空间的Korolev勋章、Kemurdjians勋章等多项奖励。
阿利克斯.波盖切夫( Alexei Bogatchev)是RCL的总工程师,他参加了切尔诺贝利机器人、法国国家太空研究中心行星探测器底盘展示样机、火星车底盘概念机、反恐遥操作移动机器人等众多项目的设计,尤其在底盘设计方面很有造诣。

图3 RCL的机器人专家
2.2 设计成果
2.2.1 专用机械臂
在机械臂设计方面,RCL为芬兰阿尔托大学的双臂机器人——WorkPartner、法国的6轮移动机器人设计了专用操作机械臂,也为德国、英国、澳大利亚等国的学术研究机构设计了20多款高性能操作机械臂。其中,有一款机械臂最具特色,其抓取重量和自重比为1。他们设计的用于不同平台的多款机械臂如图4所示。

图4 用于不同平台的机械臂
2.2.2 不同类型机器人
1)双桨船机器人
RCL设计了一款双桨船机器人,每只桨设计有4个自由度的精巧机构,通过计算机控制系统驱动控制,实现系统的划行功能。双桨船机器人实物如图5所示。
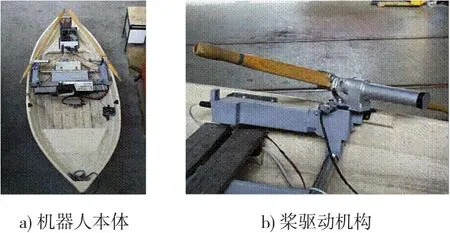
图5 双桨船机器人
2)轮式星球车Jrover
RCL和赫尔辛基技术大学联合研发了2个版本的自适应行走结构轮式星球车Jrover-1和Jrover-2,采用交接车身、锥形轮行走结构构型,并在第2版设计中增加了行走功能。图6所示为JRover-2外形结构。
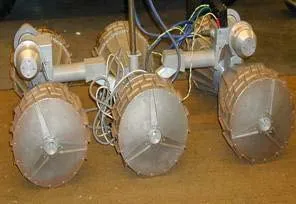
图6 轮式星球车Jrover-2
3)履带式微型火星车 RoSA-2
履带式微型火星车机器人RoSA-2由RCL设计研发,主要用于在火星钻探和采样等。该项目由赫尔辛基技术大学承研,是欧洲航天局的“机器人科学应用2”研发项目(Micro-robots for Scientific Application 2)的一部分。机器人构型如图7所示。
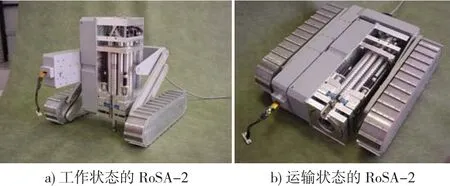
图7 履带式微型火星车RoSA-2
4)铰接底盘Hybtor
为了满足WorkPartner机器人在森林、公园等场所工作的要求,RCL设计了Hybtor高通过型铰接行走底盘,如图8所示。Hybtor适用于非结构化环境行驶,可以在沙滩、沼泽、积雪、碎石路面行走。

图8 Hybtor高通过型行走底盘
5)月球车和火星车M94/96
RCL为前苏联设计了多款月球车、火星车等,具体如图9所示。
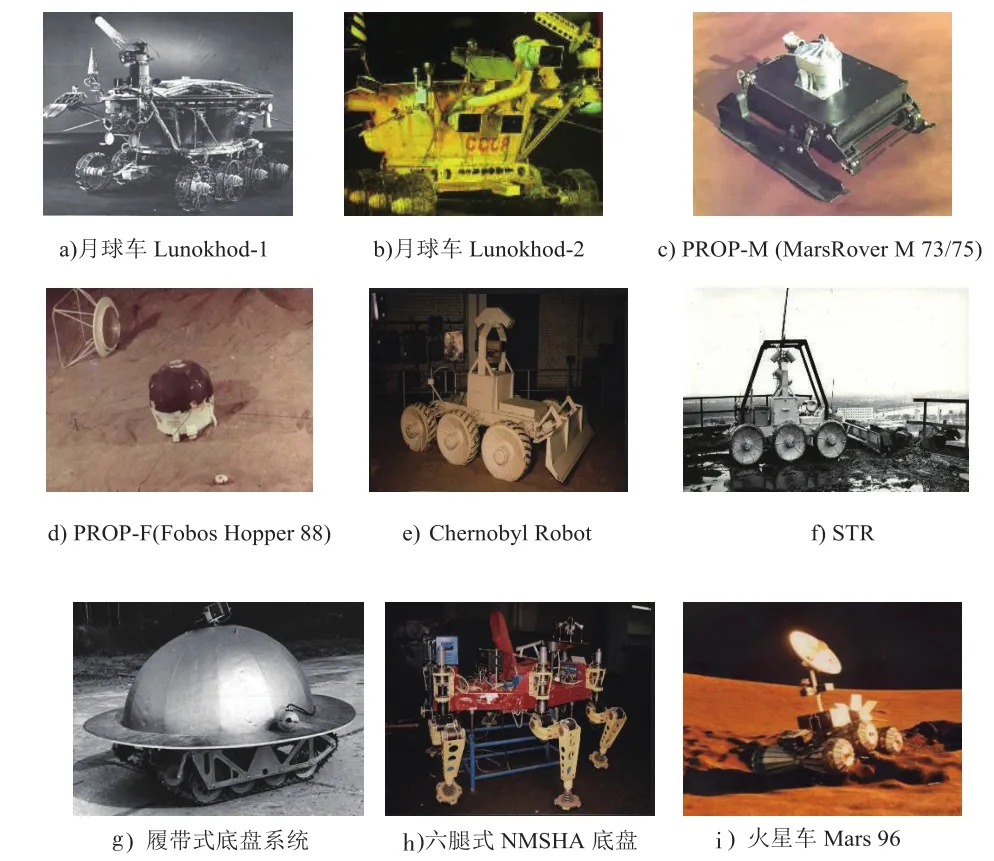
图9 多款月球车和火星车
2.2.3 机器人轮胎
星球车的特殊应用环境对轮胎提出了特殊要求,RCL为各国提供了多种星球车轮的设计构型。如图10所示。
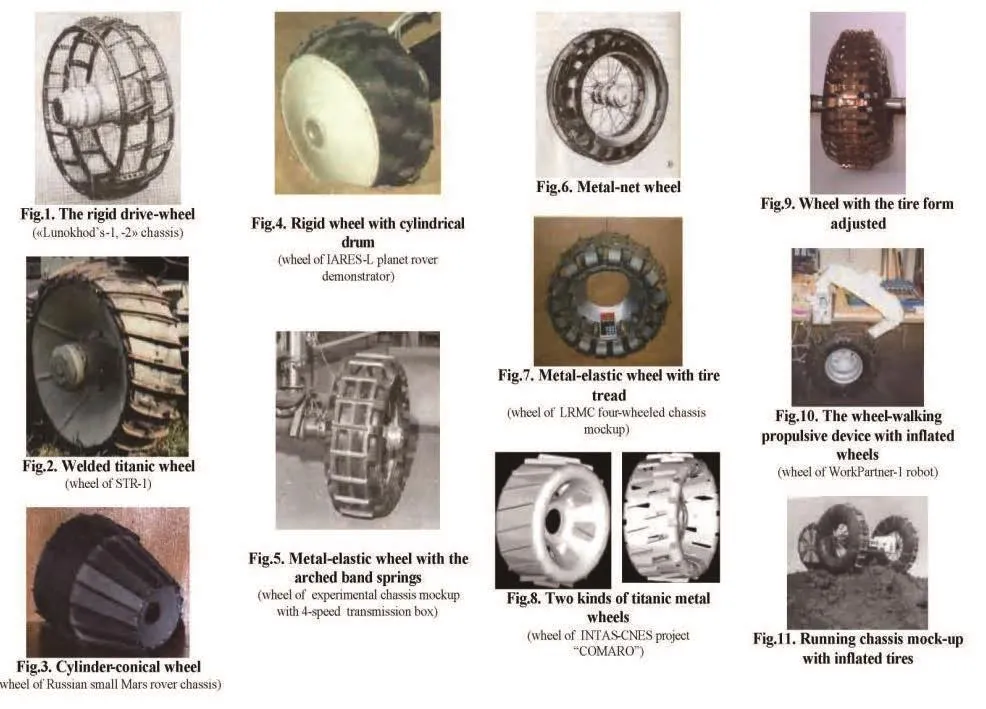
图10 各种星球车轮胎设计
2.2.4 机器人底盘
机器人和星球车通常工作在非结构化环境中,为了适应工作场所的要求,它们需要特殊的、高通过性行走底盘。RCL为芬兰、德国、英国、法国、澳大利亚等国的研究机构设计了适合在沙滩、沼泽、积雪、碎石路面行走的底盘系统。如图11所示。

图11 机器人和星球车底盘
2.3 优势技术
采用独立驱动和独立转向方式的高适应性地面无人平台设计技术是RCL的一项优势技术,其具有地形自适应机构,自由度多,并且需要将复杂的地形环境考虑在内、需要综合利用理论、仿真、试验等手段建模。RCL基于多年工作基础,积累了丰富经验,形成了基于设计、仿真、评估的完善设计理论。RCL设计的特殊环境下的轻小型移动系统,具有原创性发明,特别是在车轮/履带—驱动—传动一体化小型装置、紧凑型转向装置和支撑、悬挂装置等结构功能一体化设计方面具有丰富的设计经验。RCL在从运动学和动力学两个方面对驱动、转向、地形适应机构、稳定性调节装置等进行协调控制方面也具有丰富的经验,可以对无人平台的控制方法和动力分配技术方面提供有力的技术支持。
3 总结
RCL以地面无人平台在复杂非结构化环境应用为背景,围绕地面复杂未知环境下无人平台运行的自主决策、自主安全、高机动和稳定性问题,基于车辆地面力学和星球车行走系统基础理论,形成了无人平台系统设计流程及设计规范、地面无人平台行走系统的设计机理研究方法,掌握了地面无人平台行走系统总体设计、构型设计、结构设计、性能测试的完善设计路线。
应用上述技术,未来RCL可以产生创新的无人平台原理构型,并能快速开发和迅速工程实现无人平台产品,为产品工程应用提供基础保证。
猜你喜欢
红领巾·探索(2022年11期)2023-01-06
军民两用技术与产品(2022年1期)2022-06-01
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
百科知识(2019年5期)2019-03-18
北京航空航天大学学报(2017年10期)2017-04-20
太空探索(2016年9期)2016-07-12
中学科技(2015年7期)2015-07-03
航天返回与遥感(2014年4期)2014-07-31