
浅谈皮带高效斗提机的几个技术关键点
2018-09-22 08:16李晓红
中国水泥 2018年9期
李晓红
(唐山冀东装备工程股份有限公司装备研发中心,唐山 063030)
斗式提升机是一种应用极为广泛的垂直输送设备,它适合输送散粒状物料,如:熟料、矿渣、生料等。目前在新上2 000t以上生产能力的水泥生产线的窑尾预热器喂料和生料入库提升机,多数使用皮带高效斗提机,皮带高效提升机由于自重较小,需要动力小,工作平稳,运行速度较高,所以可以达到较大的提升高度和较高的输送能力,备受厂家和设计院的关注。料斗的设计结构以及料斗的紧密排列,也是皮带斗提机的优点,它能确保物料几乎连续地提取和卸出。但目前大部分皮带高效斗提机都是进口德国Aumund公司或Beumer公司的产品,国内生产皮带高效斗提机技术比较成熟的厂家并不多,下面我就以我公司的皮带斗式提升机为例,浅谈高效斗提机的几个技术关键点。
1 传送带
传送带是皮带斗式提升机的核心部件之一,必须使用专用的钢丝加强型胶带。传送带的胶面,宜采用耐热胶料,骨架的结构应采用纵向及横向钢丝索交错布置的形式,钢丝索形成坚固的网状结构,确保传送带对料斗的固定螺钉具有极高的抗扯裂强度,在进行强度校核时要充分考虑斗子安装孔对降低牵引力的影响。
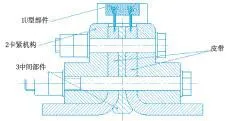
图1 U型部件1
钢丝皮带的搭接是运行高可靠性的关键,传送带的钢丝索两端须用锌铅合金浇铸,两个夹紧接头则采用铝板以减轻重量见图1。首先,用8.8级的六角螺栓将两根皮带拧紧到所需要的扭矩,再用两个螺母背紧。之后将皮带中外露的钢丝插入U型部件1中见图1,然后须将U型部件固定到中间部件3上,再将伸出的钢丝加以清理,并将这些钢丝分成股,U型部件和卡紧机构2之间的缝隙必须密封好,这时便可以浇铸。在出现松孔的情况下,浇注金属须进行局部加热,使之再变成液态。在浇注金属进行结构淬火之后,将伸出来的金属丝磨掉,这样就完成了皮带的搭接。
2 斗 子
传送带上安装斗子的孔必须使用专用工具开凿,每个孔切断钢丝的数量不能大于两根,并且应在制作胶带时打好孔。斗子安装完要进行检查,并且操作运转一段时间之后进行再次拧紧。此外,每隔6个月检查拧紧一次。这些料斗用平板螺钉固定于提升机传送带上。直径为40mm的平板头通过其锻制齿固定在纵向和横向钢丝索中,确保料斗具有较高的抗扯裂强度。在料斗和传送带之间装有软橡皮垫片,以防止当传送带绕过滚筒时物料进人。保证连接螺栓的顶面与皮带面之间的一定的间隙,以保证皮带在与驱动轮接触时螺栓不与驱动滚筒接触。另外,在皮带搭接部位的对面斗子做相应处理以增加重量,作为配重来平衡搭接装置的重量见图2。
3 滚 筒
该机尾部设有自动张紧装置,防止胶带松弛运行和尾部滚筒磨损。底辊为笼形并设有物料导向锥。驱动辊上的耐磨橡胶是拼合的,这样,可在不拆除驱动辊的情况下,很容易更换橡胶块。传送带在底部借助于带棒条滚筒转变方向,该滚筒的水平位置决定了传送带的平直运行。设在张紧配重两端的齿轮确保准确平行导向。这些齿轮与相应齿条的精确啮合,保证了可靠的平行导向。
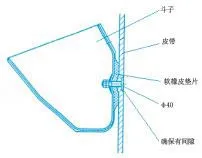
图2 平衡搭接装置图
头部滚筒的卸料方式为甩料式:

式中:P0为离心惯性力;W为重力;m为物料质量;w为物料重心的圆周速度;r为回转半径。
物料在头部驱动滚筒卸料处受两个力作用,及物料重力和离心惯性力见图3。

图3 物料所受力的作用图
由图3中三角形mba和mpo相似关系可以得到:

所以:h=gr2302/π2r2n2=895/n2=1.18<r2
因此,极点p位于驱动轮的圆周内,离心惯性力的值将永远大于重力值,料斗内的物料将沿着斗的外壁运动,故物料做离心式卸载。可见,当驱动轮转速(1~2m/s)一定时,极距h就确定了,欲保持物料离心卸载,必须正确选择驱动轮的转速和卸料口的位置,以防料斗回料。
尾部密封为防尘结构,在尾部壳体上开2个1 200×1 294mm的孔,尾轴连同一对轴承及密封装置从这2个孔穿出,另外,有两件密封罩3与壳体用螺栓把死,其间加1.5mm的石棉密封板,图5中张紧拉杆2从密封罩3穿出的位置加10mm的橡胶密封垫,将尾部壳体密封。针对SKF的球面辊子轴承,采用装配式密封和密封端盖,定位盘和轴承座之间留有8mm的间隙作为轴向调整空间见图4。
尾部设有自动张紧装置,张紧轮由齿轮、定位套和配重块焊接而成。如果皮带由于各种原因引起伸长,这套张紧装置就会靠自重做垂直向下的运动,因此必须保证张紧拉杆2始终处于竖直位置。张紧轮在轴向和径向都靠定位块1来定位,轴向留有5mm的调整量,径向在齿轮与定位块之间留有0~1mm的间隙,张紧轮在竖直方向的调整范围为300mm见图5。
4 电气设计

图4 轴向调整空间(mm)

图5 调整范围(mm)
在主驱动装置里设置一慢转驱动机构,主驱与慢驱实行联锁,这样,这两种驱动方式就不能同时处于接通状态。设计时,按照物料流的逆顺序接通斗式提升机的驱动装置,即排料机构—斗式提升机—喂料机构及检控机构。驱动装置的停机按上述相反顺序进行。①运行检测器—速度检测器。在斗提机的喂料箱内安装一脉冲传感器,用以检测尾轴的转速。如果额定转速低于允许转速值,则给料机构和斗式提升机就得处于停机状态。②填充式料位显示器。在提升机的底部加装料位开关来控制填充料位。如果给料槽中的物料超过规定高度,则喂料机构和斗式提升机就会断路。③皮带跑偏控制器。为了避免皮带发生跑偏,在斗提机的头部和尾部两个侧面设有限位开关,如果皮带碰到四个开关中的一个,就会将其推到第一个触发点,这时就会得到一光信号或声响信号。当到达第二个触发点时,给料机构和斗提机的驱动装置就必须立即停车。
所有传感器的信号都进入控制系统的PC中,在PC处理程序中将实际的测定值与最初输入作为极限值的设定值进行比较。一旦发现超出极限值或者偏离正常操作条件,立即做出反应,斗提机的PC还与中控室的DCS系统相连,以便在CCR能清楚地知道传送带的平稳运行、运转速度、工作温度、润滑油液位、空载功率、正常功率和最大功率等,进行统一监测和控制。
猜你喜欢
山东冶金(2022年4期)2022-09-14
中国设备工程(2022年12期)2022-07-11
电子乐园·上旬刊(2022年5期)2022-04-09
中学生数理化·高一版(2021年1期)2021-03-19
中国新技术新产品(2020年18期)2020-12-22
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
世界有色金属(2020年22期)2020-02-25
中国设备工程(2017年19期)2017-10-24
中学教学参考·理科版(2016年11期)2017-06-08
中国高新技术企业(2015年13期)2015-04-30
