超声波传感器在飞行智能避障中的应用
2018-09-22 04:15罗男生东莞理工学院机械工程学院黄市生曾志彬吴国洪东莞市横沥模具科技产业发展有限公司罗鸿彬东莞市朝茗机电科技有限公司
数码世界 2018年8期
罗男生 东莞理工学院机械工程学院 黄市生 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司 罗鸿彬 东莞市朝茗机电科技有限公司
0 前言
四轴飞行器因其机动性能好、轻便灵活,现在正被广泛应用于多个领域当中,如侦查、桥梁检测以及电力巡线等,然而当飞行器远离人的视野时,如果飞行器不能自动识别障碍物以及自动避开障碍物,飞行器将会由于撞上障碍物而损害,由于飞行器价格并不低廉,因此在四轴飞行器上实现自动避障是很有必要的。调研发现,国内外大多研究者使用视觉避障系统,包括大疆四轴飞行器、Intel四轴飞行器,使用双目视觉可以获取前方一定范围内的三维深度信息,但是一个摄像头只能检测单个方向上的障碍物,当其倒退飞行或侧飞时,避障系统未能识别到障碍物,存在着很大的安全隐患;然而多个摄像头的使用,又会使得成本大大提高,并且视觉避障的效果会受光照度影响。
针对以上问题,本文提出利用多个超声波传感器设计四轴飞行器的自动避障系统,探测周围的环境,实现四轴飞行器多方位防撞的功能。超声波传感器的价格低廉,开发成本低 [2],具有不受光线干扰、测量距离远等优点,在四轴飞行器前后左右四个方向都能实现良好的避障效果。
1 超声波避障四轴飞行器的结构
超声波避障四轴飞行器整体设计为四旋翼样式,具有前后左右四个正方向,机头向北,四个正方向刚好与东南西北吻合,控制方便;机架的中心板(载板)呈正方形,便于对称布置传感器,整个四轴飞行器的重心基本与中心重合;旋翼的大小、电机的转速共同影响四轴飞行器的升力,本设计选用R=125mm的旋翼,电机选用960KV(转速=电压×960 转/分);总设计尺寸385mm×385mm×310mm,主要零件及构造如图1所示。
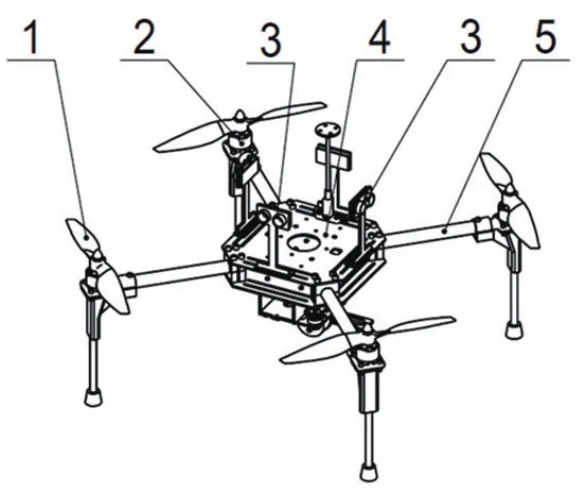
图1 硬件结构设计图
2 四轴飞行器的原理
分析四旋翼四轴飞行器的垂直运动,在图2中,因有两对电机转向相反,可以平衡其对机身的反扭矩,其中电机M1、M3为逆时针旋转;电机M2、M4为顺时针旋转,电机M1、M2所在的方向为机头方向。当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
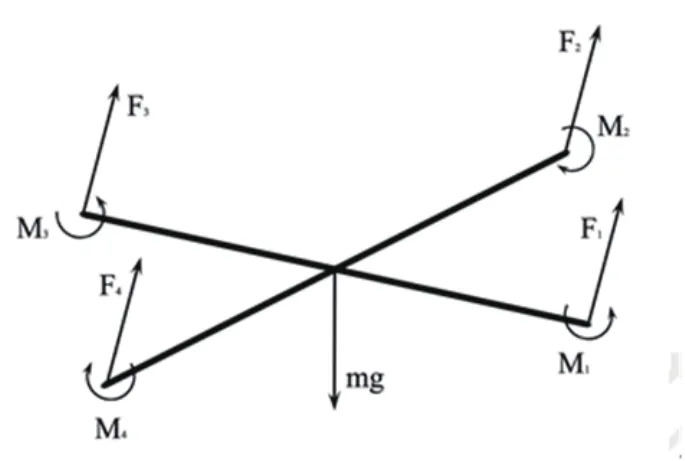
图2 垂直运动示意图
分析四旋翼四轴飞行器的前后运动,要想实现飞行器在水平面内前后、左右的运动,需要在水平面内对飞行器施加一定的力。在图2中,电机M1、M2所在的方向为机头方向,增加电机M3、M4的转速,使拉力增大,保持电机M1、M2转速不变,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。
分析四旋翼四轴飞行器的左右运动,左右运动的原理与前后运动的原理相同,区别在于增大转速的电机对象改变了。
3 自动避障系统设计
为了实现四轴飞行器搭载超声波传感器后可以较精准地检测四周障碍物与自动避开障碍物,需要在机架的前后左右方向各安装一个超声波传感器。飞行器左右的两个超声波传感器对称安装,左右两个超声波传感器相距约为117mm;飞行器前后的两个超声波传感器也是对称安装,相距约为117mm。由于需要连接四个超声波传感器,也就需要8路数字输入输出口,因此选用拥有多路数字输入输出口的Arduino Mega2560单片机收集传感器测距数据,大致样式如图3所示,再由串口与飞行控制器进行通信,控制输出不同的脉冲宽度,控制电机的转速,改变姿态方向飞行。
为实现自动避障功能,需要对障碍物进行距离测量,在飞行器前后左右四个方向上安装超声波传感器,实时检测四个方向上障碍物的距离,当超声波传感器的测距值小于程序中的预设值(50cm),即为检测到障碍物,然后通过串口通讯方式向飞行控制器发送信号,飞行控制器判断是哪个方向的传感器发来的信号,然后做出相对应该方向的避障反应,改变飞行姿态,改变飞行方向,从而实现避开障碍物的功能。实现自动避障的软件流程如图3所示。
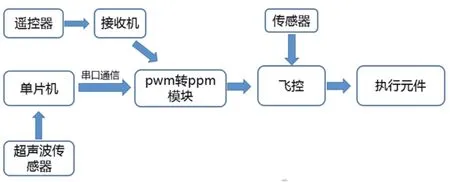
图3 自动避障的软件流程图
4 结语
本文所做的工作总结如下:第一,根据功能的要求对飞行器进行了结构设计;第二,根据功能要求搭建了飞行器自动避障系统。本文利用四个超声波传感器设计四轴飞行器的自动避障系统,探测周围的环境,实现四轴飞行器多方位防撞的功能。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
航空发动机(2020年3期)2020-07-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年9期)2019-05-30
好孩子画报(2019年10期)2019-01-10
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11