基于九开关变换器的集成车载充电器的研究
2018-09-20 06:32刘陵顺吕兴贺雷娇李显龙胡光
电气自动化 2018年3期
刘陵顺, 吕兴贺, 雷娇, 李显龙, 胡光
(1.海军航空大学 控制工程系,山东 烟台 264001;2.河海大学 能源与电气学院,江苏 南京 211100)
基金项目:国家自然科学基金(51377168)
0 引 言
随着科技的进步以及人们环保意识的增强,电动汽车的发展越来越引起大家的重视。目前市场上电动汽车的电池充电器主要有快速非车载直流充电器和慢速车载交流充电器两种类型[1]7244。快速非车载直流充电器最大的优势是可以对电池进行快速充电,但是当电池快没电时,驾驶员必须根据充电站的位置来规划行驶路线。慢速车载虽然解决了上述问题,但是其充电速度又非常缓慢。所以三相电源、即插即用、车载的、快速充电的解决方案是电动汽车一个重点研究领域[2]5326,这些解决方案将会为驾驶员带来更灵活便捷的充电,只要有三相电输出即可实现对电动汽车的充电。
目前大多数的电动汽车均采用感应或永磁同步类型的电机作为驱动电机[3]。然而,包括在文献[4-8]中虽然利用了所提类型的电机,但是只有少数的装置能够实现快速充电。此外,大多数的解决方案要求电机在充电过程中机械锁定,因为在充电过程中会在电机中产生一个转矩,这将导致电机效率降低,同时增加了损耗。
需要注意的是,在充电过程中电机一般都是闲置的。因此,如果将电机集成到充电过程,那将大大降低生产成本,同时降低了汽车的质量,节省了空间[1]7244。由于非对称六相电机具有低成本、低相电压和相电流、可消除高次谐波的附加转矩等特点[9],同时采用九开关变换器(Nine-Switch Converter,NSC)可减少充电器的体积和质量[2]5328,因此,文中提出了一种将九开关变换器和非对称六相电机集成到充电过程的新拓扑结构,进而实现充电驱动一体化。
1 充电器的模型及其工作原理
文中提出一体化充电机的拓扑结构,如图1所示。此拓扑结构可以工作在驱动和充电两种模式中,其中,在驱动模式中开关S1~S4是闭合的,六相电机有两个独立的中性点,电源被隔离开。在充电模式中需要开关S1~S4全部打开,NSC的中间开关SM1、SM2和SM3是持续导通的[2]5328(相当于导线),需要注意的是,通过相位移原理,六相电机的上面三相连接方式为a到a,b到b,c到c;而下面三相的连接方式为a到d,b到f,c到e。连接方式如图1所示。文中只讨论充电过程,驱动过程先不予以讨论。
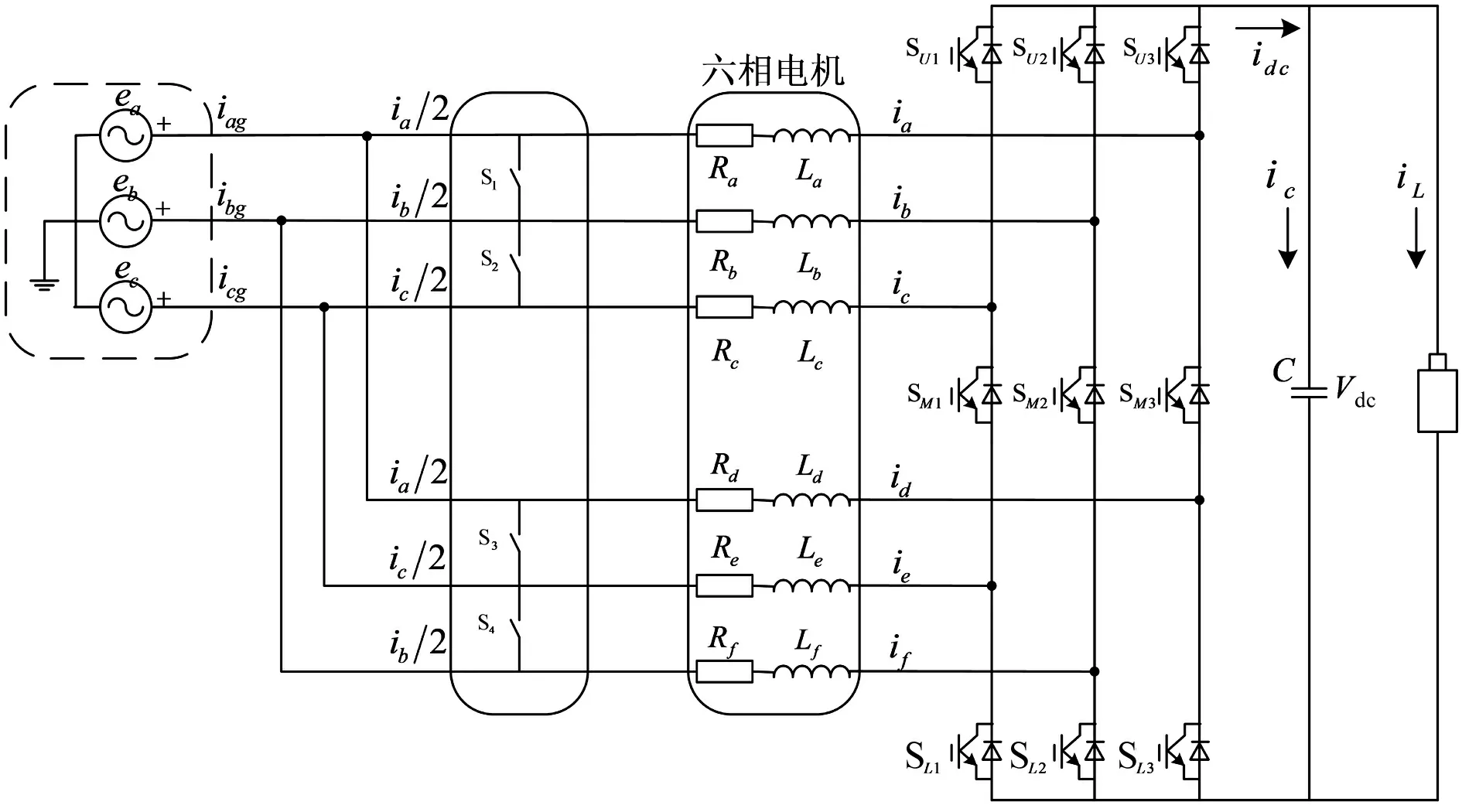
图1 一体化充电机拓扑结构图
众所周知,当三相电流通过电机绕组时会产生旋转磁场,而按照上述的连接方式,上下两个三相绕组产生的旋转磁场大小相等且旋转方向相反,使得旋转磁场相互抵消,从而不能够产生转矩,因此使得电机保持静止状态,其原理如图2所示。同时电机的定子绕组相当于滤波电感,避免了外加滤波装置,因此降低了电动汽车的质量和成本。

图2 两套绕组装置的旋转磁场
上述理论分析的公式推导证明如下。非对称电机变换矩阵为:
(1)
此非对称六相电机具有两个独立的中性点,两个三相绕组之间的相位差为θ=30°,它们可以构成三个相互正交的子空间,即αβ子空间:V1=spaneα,eβ;xy子空间:V2=spanex,ey;o1o2子空间:V3=spaneo1,eo2。因为电机在充电模式的运行情况可以通过非对称六相电机系统的二维空间向量进行评估[10],所以零序输入向量全部控制为零。因此电压、电流等变量可以表示为:
(2)
其中
a=expjθ=cosθ+jsinθ,θ=30°
(3)
电网电流公式给出如下:

(4)
根据图1电机绕组和电网相电流的关系,可以得出:
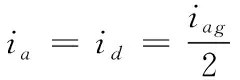
(5)
把式(4)和式(5)代入式(2),可得到如下公式:
(6)
(7)
从式(6)可以看出,α分量与β分量的比值为α/β=0.966/0.259≈3.73,所以α分量约为β分量的3.73倍。因此这两个分量是成比例的,也就是说有一部分励磁从转矩产生的平面转移到了非转矩产生的平面,因此励磁在转矩产生的平面(αβ)是脉动的,所以在电机中不产生转矩,进而电机保持静止状态。所以前面的理论分析成立。
2 充电模式的控制算法
通过图1可以看出,相同电流流过的两个电机绕组相当于并联关系,而充电过程九开关变换器中间开关一直处于导通状态,所以充电过程的拓扑结构可以等效为图3所示的电路图。
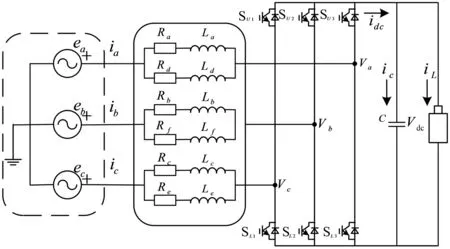
图3 充电模式等效图
从图3所示的等效充电电路图可以进一步等效,如图4所示。对充电器的控制相当于对一个标准的三相电压源整流器(VSR)的控制。因此可以采用典型的电压外环和电流内环的双闭环的电压定向控制[11-12],电压外环实现对三相VSR直流侧电压的控制,电流内环根据电压外环输出的电流指令实现对电流的控制。控制算法如图5所示。
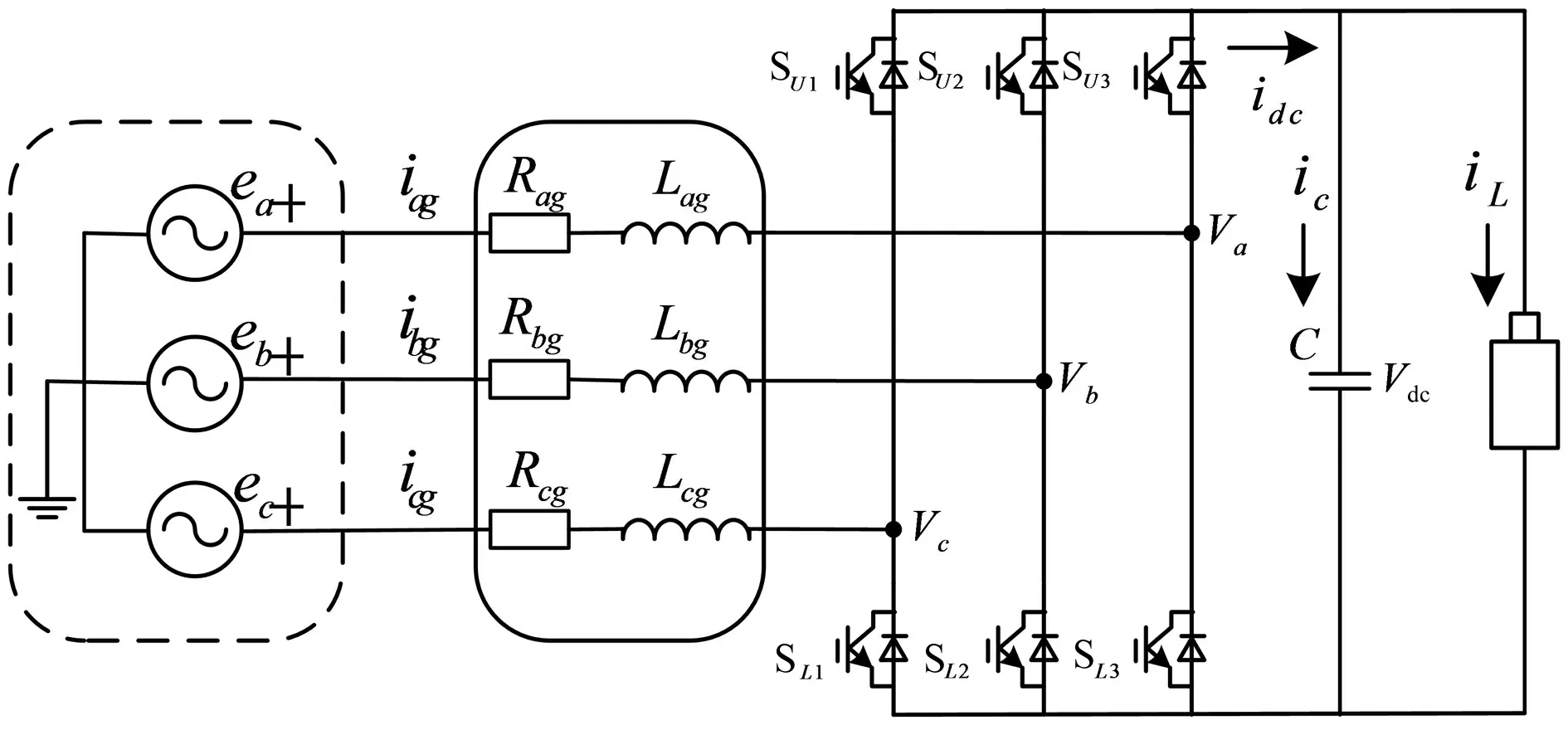
图4 充电模式进一步等效图
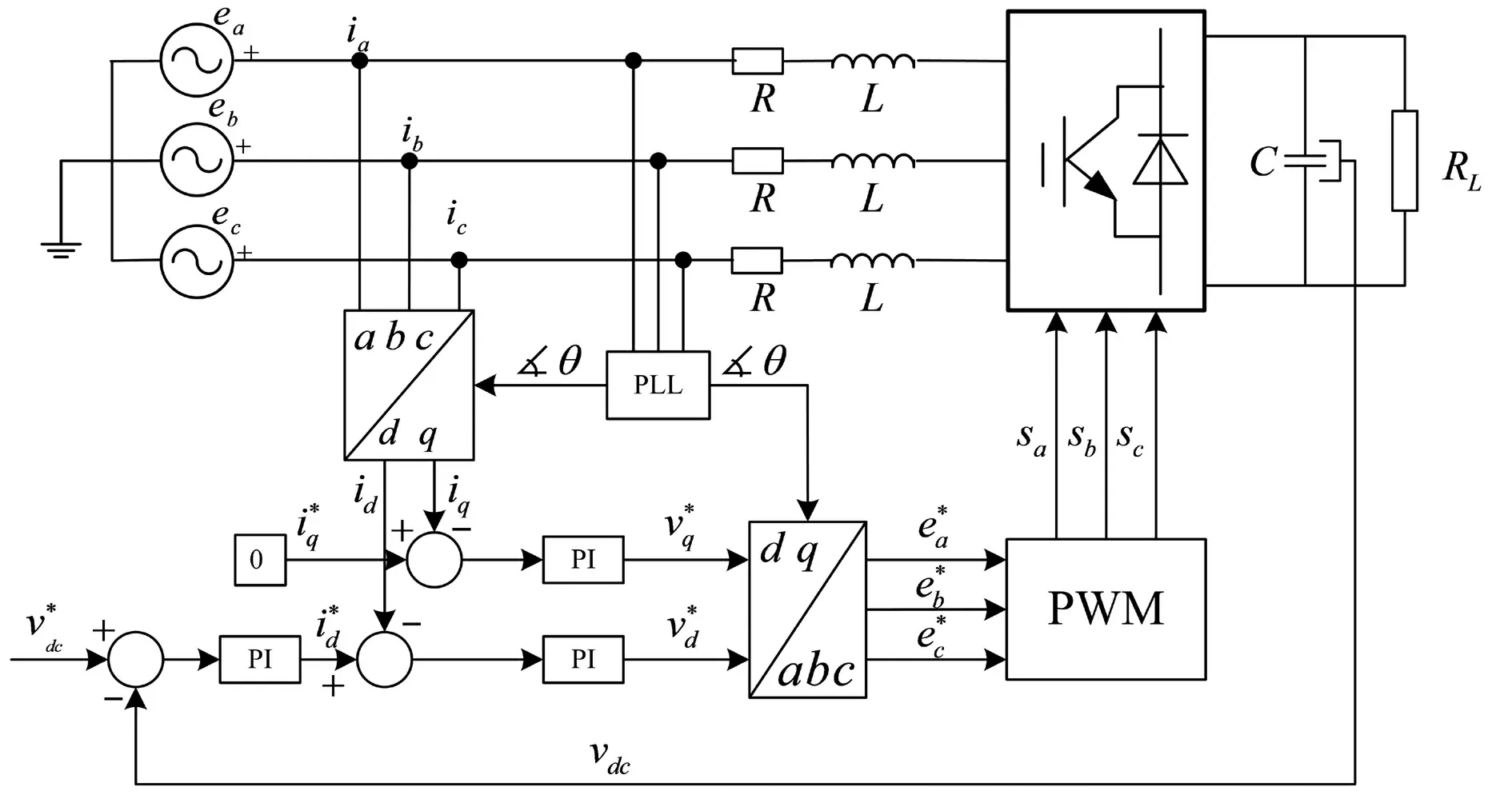
图5 充电模式控制算法

3 仿真分析
所提出的快速充电器的充电操作模式在MATLAB/Simulink环境下的仿真结果在本节给出。由图5可知,控制模块主要包括电压外环控制模块和电流内环控制模块,电压外环和电流内环仿真模块分别示于图6和图7。
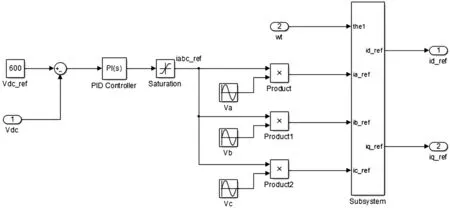
图6 电压外环控制模块
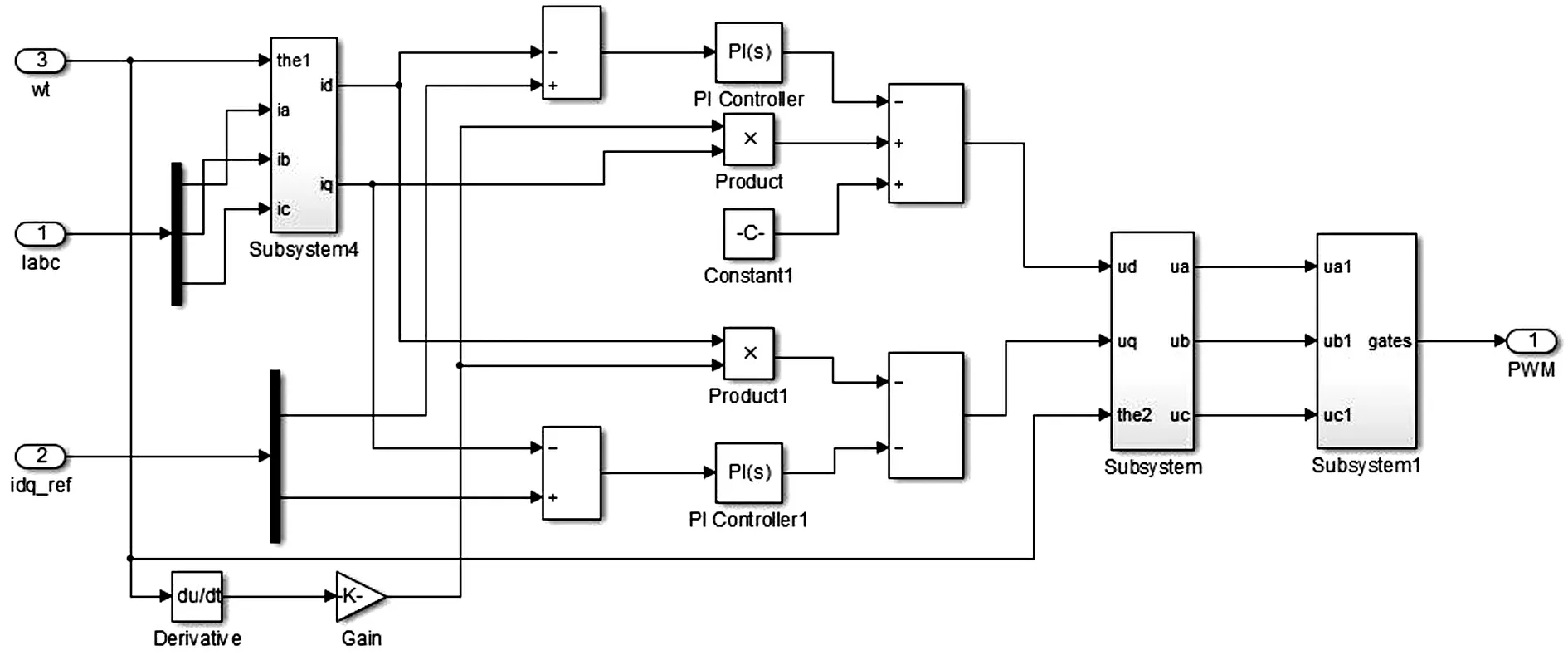
图7 电流内环控制模块
仿真参数给出如下:三相电网是相电压为240 Vrms;频率为50 Hz的正弦曲线;变换器的开关频率为10 kHz;直流母线电容设置为C=5.6×10-4F;直流侧电阻设置为RL=48 Ω;直流母线电压设定为600 V;双三相PMSM参数为R=0.291 Ω,Ld=Lq=4.586 mH,ψf=0.049 6 Wb,np=2,J=0.052 kg·m2。
仿真结果见图8。图8(a)给出了交流侧三相电源的电流波形,图8(b)给出了交流侧a相的电压和电流波形,图8(c)给出了交流侧电流的dq分量。

图8 交流侧电压电流仿真波形
从图8(b)和图8(c)可以看出,网侧电流与网侧电压同相,而且从电流的dq分量可以看出iq=0。这说明所有的能量转换都是通过d轴来完成的,也就意味着充电在单位功率因数运行。
图9给出了a相电流的傅立叶分析图,对a相电流从t=0.1 s开始的3个周期内的仿真波形进行了傅立叶分析(FFT analysis)。
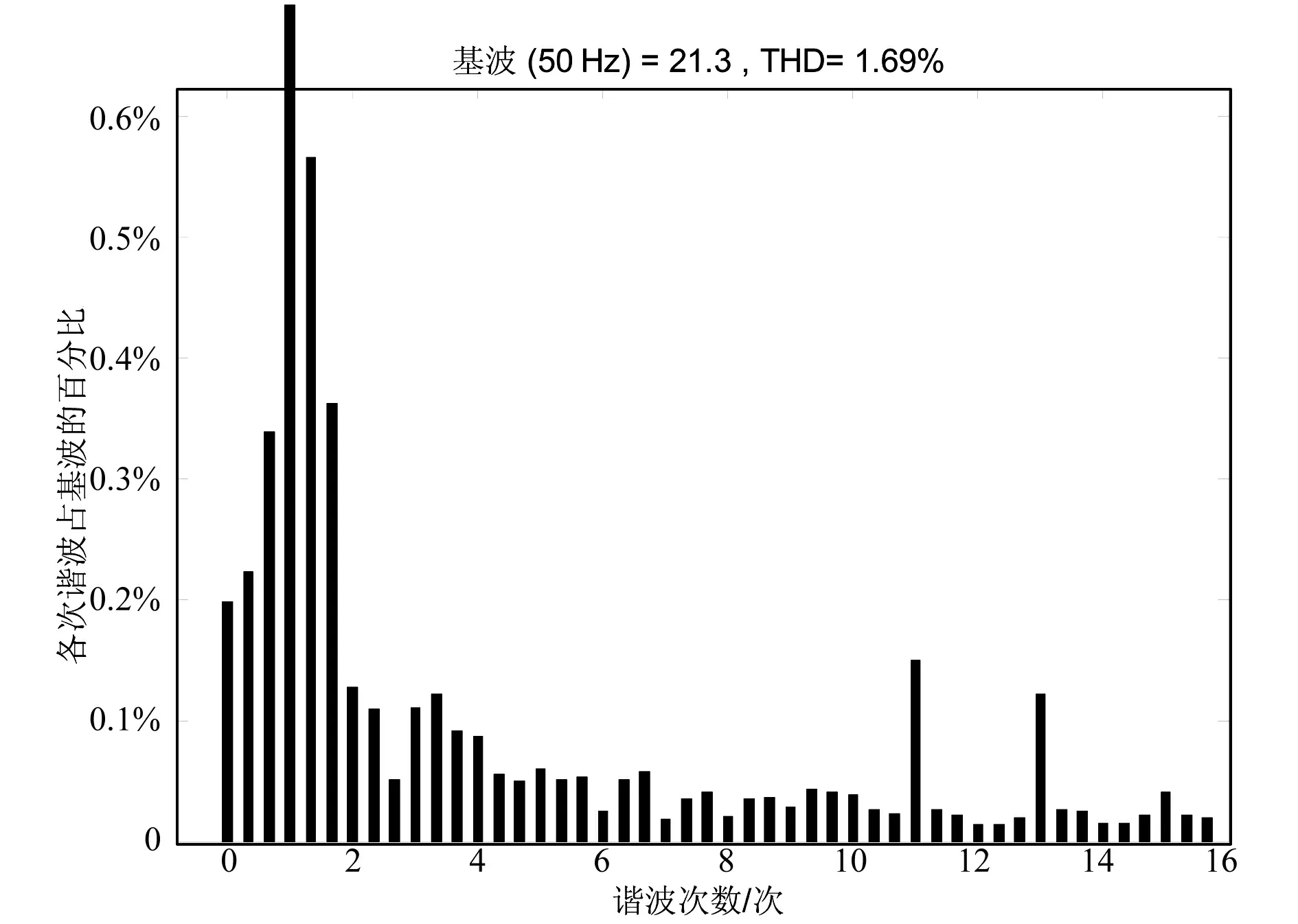
图9 a相电流的傅立叶分析
决定整流系统的整流效果好坏的主要性能指标是直流侧的电压波形。多数文献中[13-15],都是将电机用电阻和电感代替的。为了验证电机在此系统的可行性,用电阻和电感代替的整流系统的直流侧的电压波形和电机整流充电系统的直流侧的电压波形分别见图10和图11。
需要说明的是,用电阻电感代替的仿真系统的参数为:R=1 Ω、L=5 mH、直流母线电容设置为C=5×10-4F,其他参数与之前设置一样。图10给出了用电阻和电感代替的等效系统的直流侧直流母线电压的波形,可以看出直流电压很快就跟随参考电压,稳定在600 V附近。因此证明了用电阻和电感代替电机的等效充电系统的可行性与正确性。
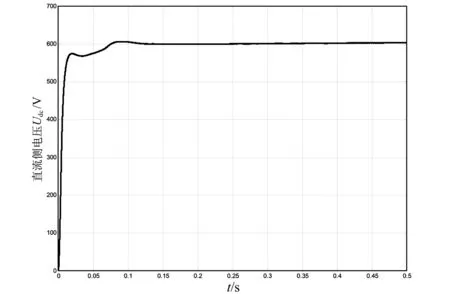
图10 等效系统直流侧电压
图11给出了本文所提系统的(电机接进到充电系统中)直流侧的电压波形。从图11可以很明显地看出,其整流效果不如等效系统的整流效果。但是也可以看出通过很短时间电压也可以实现对给定电压的跟随,在实际的应用中是足够满足要求的,因此所提一体化充电系统是可行的。

图11 所提系统直流侧电压
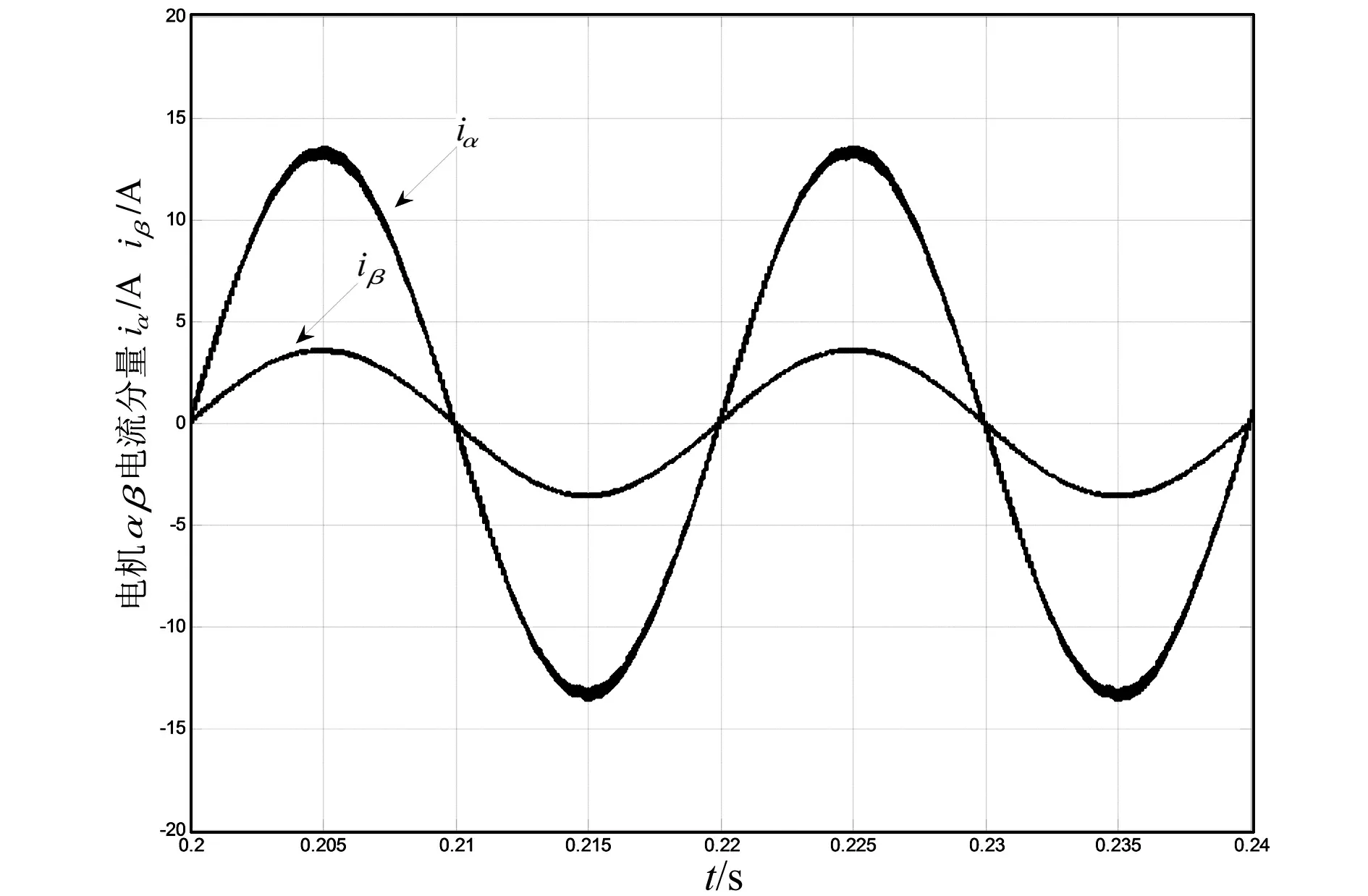
图12 电机电流αβ分量
图12给出了电机电流在αβ坐标系下的分量,从图可以看出αβ分量同相且α分量约为β分量的3.73倍,这与之前的理论推导式(6)是相对应的,因此再一次证明了理论的正确性。所以αβ平面会在电机中产生脉动的磁场,众所周知脉动磁场在电机中不能够产生启动转矩,因此电机在充电过程中保持静止状态。
图13给出了电机的转矩波形,可以看出最开始电机转矩经过短暂的脉动,最终稳定在零,因此转速也为零,证明了之前理论推导的正确性。
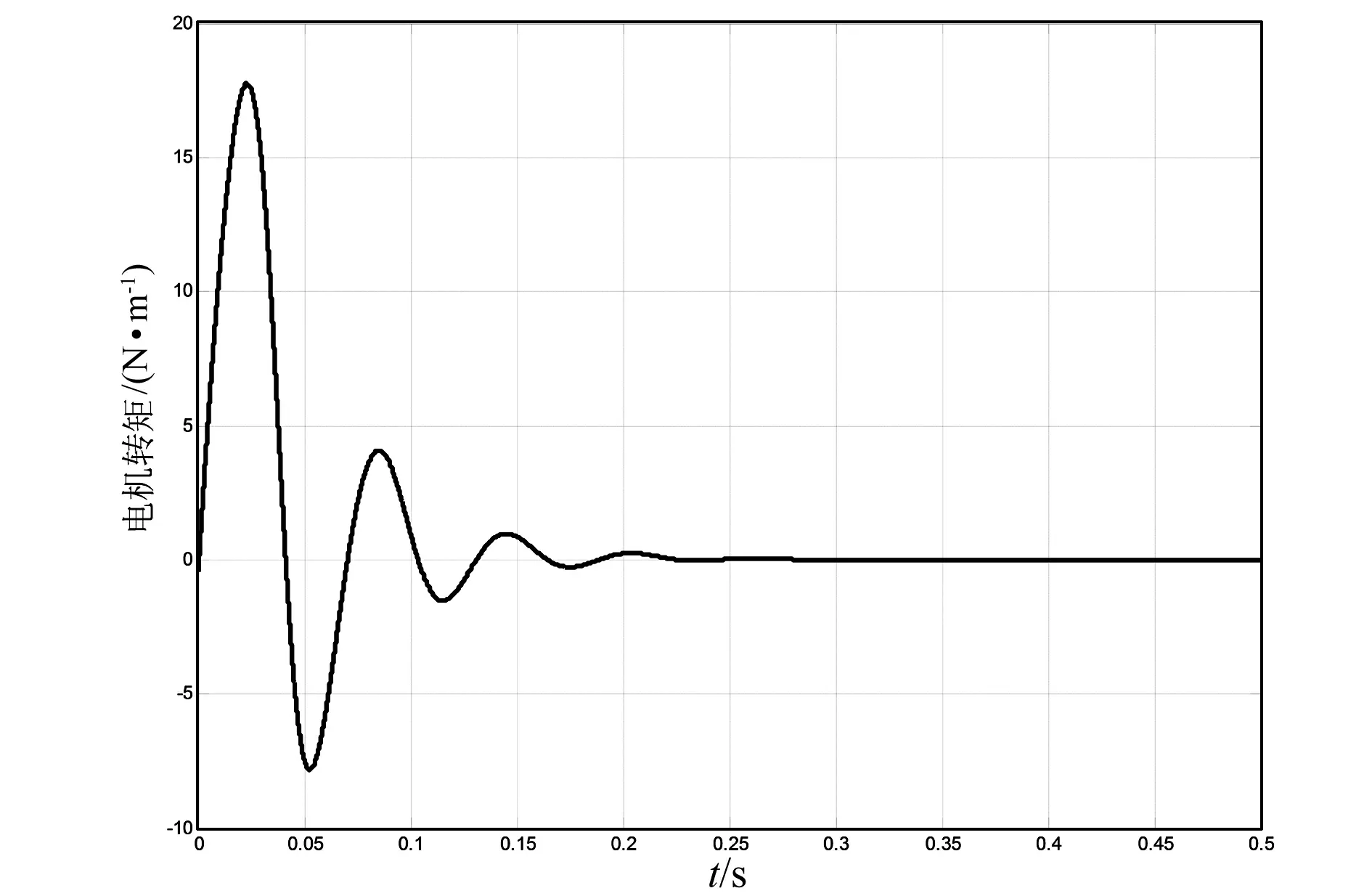
图13 电机转矩
4 结束语
本文提出了一种新的电动汽车的快速充电器,它可以从标准的三相电网进行充电,而且完全集成车载。把九开关变换器和一台双三相PMSM合并到了充电过程中,避免了额外的电力电子元件的花费。并且通过仿真证明了在充电过程中无转矩的产生以及系统的可行性。
猜你喜欢
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
哈尔滨铁道科技(2020年4期)2020-07-22
小学生优秀作文(趣味阅读)(2018年6期)2018-11-29
电子制作(2016年15期)2017-01-15
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年21期)2014-04-04
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
中国质量与标准导报(2014年1期)2014-02-28