基于STM32交流接触器触头弹跳跟踪研究*
2018-09-20 06:00:44彭亚涛马乾勋陈东强
福建轻纺 2018年9期
彭亚涛,马乾勋,陈东强
(厦门理工学院,福建 厦门 361024)
引言
交流接触器在投入运行后的稳定性,特别是运动部件的性能对电器设备的正常运行尤为重要[1],通常情况下交流接触器在原塑外壳的保护下无法直接观测触头的弹跳情况,为此本研究通过增加弹跳视窗设计从而实现可视化的交流接触器外壳结构。在保证机械性能和电气性能可靠的情况下,通过杠杆原理放大交流接触器吸合时触头的振动,然后利用传感器和STM32处理变化的电压,最后记录数据。采用应变片传感器与振动传感器测取触头弹跳的线性机械参数与测取电压、电流等非线性间接参数研究相对比,更加的准确与直观。
1 交流接触器触头基本情况
交流接触器属于低压电器中控制电器中的一种[1],能够实现手动或自动开断电器,主要用于不受位置限制的反复操作和控制[2]。在电器的开关过程中触头的弹跳能反映接触器的的相关性能,触头的弹跳参数对其电气性能有直接的影响。交流接触器在合闸过程中动、静触头会进行碰撞和弹跳,电磨损和机械磨损是触头最主要的损耗方式。为了防止损耗严重,一般选用导电性能好的材料和接触电阻小的材料作为触头材料。静触头闭合过程中因为碰撞而产生的触头弹跳会导致触头表面材料磨损及分合时产生的电弧高温能使触头面上的合金材料熔化和喷溅,从而使得动、静触头无法紧密贴合影响电寿命和机器寿命,甚至直接对其造成损坏[3]。本论文通过可视化的外壳采集到触头的弹跳过程,判断接触器的工作性能,通过电气参数测量来判断是否出现由于长时间使用的老化氧化、触头上有异物、烧弧造成的缺陷、运动部分有卡阻现象等一系列问题[4]。
2 实验平台的设计与搭建
2.1 实验平台
本文以最常见的上民CJX2-0910接触器为研究对象,其额定电压为380V/50Hz。利用前置的空气开关实现380V电源的闭合与开断,从而控制触头之间的吸合[5]。在弹跳测试中,同时通过串口观测和屏幕显示来观测触头弹跳情况。屏幕实时显示电压值,而通过串口助手可以看到所有的变化值,方便后续的数据处理。实验平台如下图1。
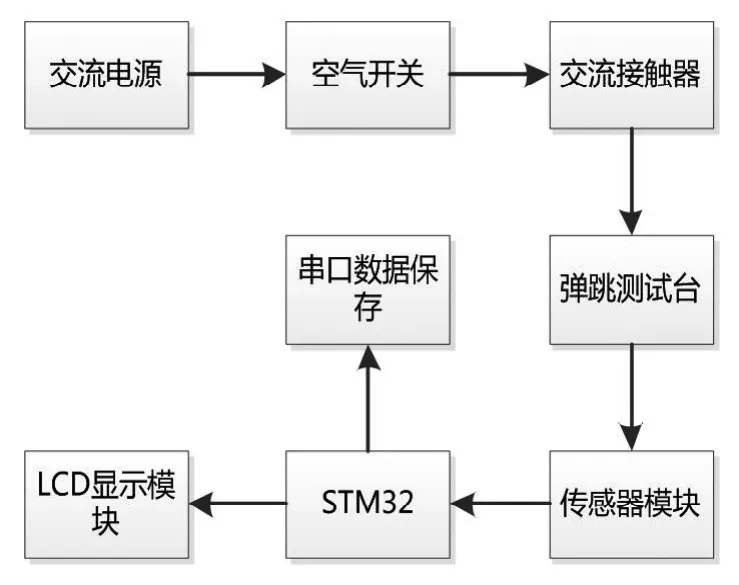
图1 实验平台
2.2 特殊接触器外壳的选取
使用CAD绘制同等比例的特殊接触器外壳,通过3D打印和亚克力板切割的2种原材料制作特殊交流接触器外壳,分别使用了纯3D打印、亚克力板结合3D打印、原注塑外壳结合亚克力板这3种方案,优缺点如表1。

表1 3种方案优缺点对比
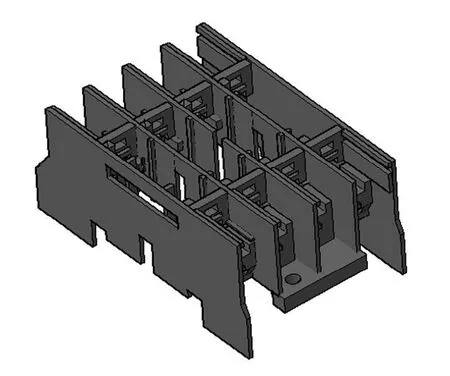
图2 特殊接触器外壳
2.3 振动传感器原理及测试
在振动传感器中,需要输入5V的直流电压,输出的信号有LED指示。可选择TTL电平输出或是模拟信号输出。当有振动时,TTL输出的信号为高电平,而模拟信号中输出的电压越高说明振动的幅度越大。振动传感器的灵敏度可以通过电位器调节,低灵敏度时,需要手用力敲击才有输出;高灵敏度时,有轻微振动即有输出。
2.4 应变片弯曲传感器原理及测试
应变片是用于测量机械结构变化的元件。通过应变片的机械形变,转化为电阻变化量,从而改变输出电压值。通过输出电压值的变化来判定应变片的形变程度。常用的应变片为电阻式应变片。通常金属丝原始电阻为

其中R为电阻,电阻率为ρ,长度为l,截面积为s。当金属丝收到拉力后,长度、电阻率、电阻值的变化分别为△l、△ρ、△R。应变片的效应表达式为

其中k0为金属丝的灵敏系数,ε为金属丝的轴向应变。应变片的电阻变化很微小,必须有放大电路检测其微小的变化。将应变片紧密贴合在弹跳放大杠杆上,选择应变片电阻的变化能对电路起到控制作用的电路,如惠斯通电桥。此电桥由4个电阻组成电桥,当其中一个电阻发生变化后,电压会输出不平衡电压,然后对此电压进行适当的放大处理,就可测出接触器的弹跳量。在传感器的选取上,若灵敏度的选取过小,则获取不到弹跳信息;若灵敏度过大则,则获取的弹跳信息会杂乱,包含许多干扰信息。在进行多次预实验后,选取波形清晰的灵敏度。
2.5 STM32设计
STM32具有完善的底层函数库,可以使用相关函数非常方便地调用所需功能。通用异步收发器UART,用于串口通信;模数转换器ADC,可以将模拟量转化成数字量。通过开发板外接传感器模块,传感器的电压变化通过I/O口输入后处理。
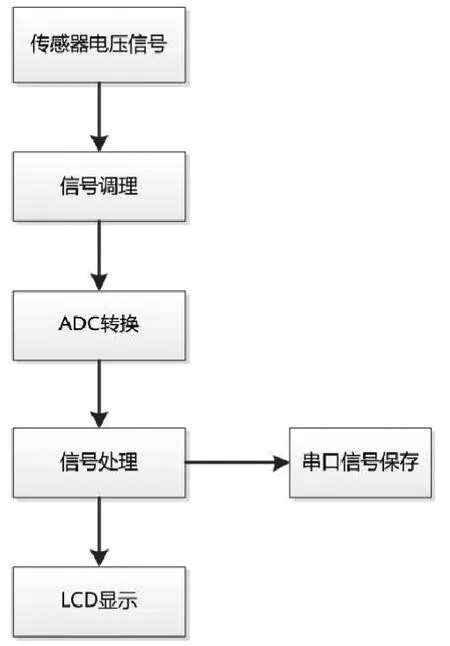
图3 数据处理序流程图
STM32开发板和传感器的配合,可以初步实现对外部振动的物件进行模拟值电压采集,再将采集的值换算成实际电压,并通过串口保存电压变化的数据。可实现振动传感器和应变片传感器对不同程度振动测试的灵敏性的对比,用LCD显示屏的显示电压持续的变化值,为后续的采集和分析数据提供参考。
2.6 弹跳测试台搭建
交流接触器触头弹跳十分微小,肉眼看不出来[6]。为了得到准确的数据,需要对弹跳进行放大。以3维建模设计杠杆臂,用PLA材料打印出杠杆模型。
选择长臂端为传感器接收力端,而短臂端与接触器触头弹跳嵌入,与触头同时振动。考虑到实用性,设计了两种臂长度都为150 mm杠杆,直径为10 mm的旋转轴,短臂与长臂比例为1∶2,为了配合触头和小窗测试,长、短臂的厚度为1.5 mm,宽度为5 mm。支架的高度为150 mm,每隔20 mm设置5个圆孔,使得高度可调。如图4。打印出来后发现比例为1∶4的杠杆由于短臂过于短,弹跳时容易发生脱离触头,最后选用1∶2的杠杆。
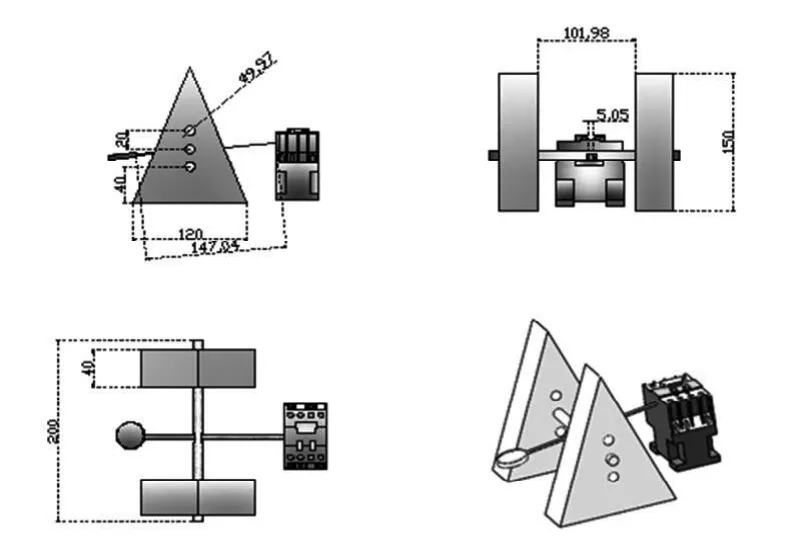
图4 弹跳测试台模型及三视图
3 上电测试与结果分析
3.1 接触器上电开关测试
通过振动传感器对上民CJX2-0910接触器上电进行测试,在不改变灵敏度的情况下进行5次测试。经过排除偏差最大的一条线后得到实际电压折线图如图5-1。由图可得知在正常的接触器中,原始传感器输出电压为0.59 V左右,触头闭合时,电压在0.58~0.66 V之间;触头断开时,电压在0.56~0.78 V之间。
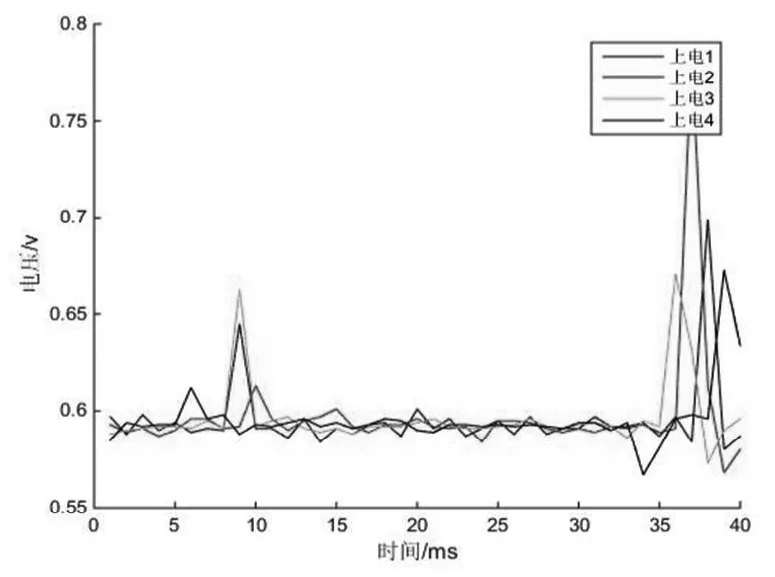
图5-1 振动传感器上电测试触头弹跳
通过应变片传感器对上民CJX2-0910接触器上电进行测试。进行测试5组,选其中最为靠近的4组。得到实际电压折线图,如图5-2。由于在应变片传感器中,杠杆粘合应变片之中而始终无法完美贴合,整条曲线会往下平移,但并不影响电压变化的观测。由图可知在正常的接触器中,原始传感器输出电压为0.23 ~0.28 V左右;触头闭合时,振幅在0.025~0.047 V之间;触头断开时,振幅0.04~0.06 V之间。
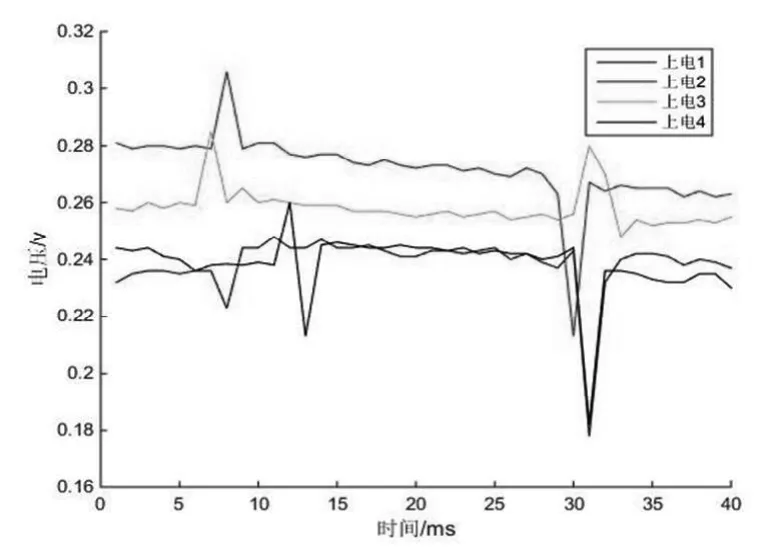
图5-2 应变片传感器上电测试
触头弹跳分析:对上民CJX2-0910型号的接触器动触头的弹跳进行上电测试,通过多次测试可得知正常的交流接触器吸合和断开的时,接触器弹跳都是在一定范围内,后续采用此数据作为标准。当上电测试后,应变片传感器的灵敏度比振动传感器更大,而振动传感器波形类比弹跳效果好。后续使用2种传感器进行测试,振动传感器观测触头弹跳的波形,而应变片传感器观测弹跳的频率。
3.2 接触器上电开关变量测试
3.2.1 接触器触头弹簧
为了减少动、静触头之间的电弧烧蚀断电后弹簧使触点迅速分断,其高度固定,因此弹性形变也是固定的。通过压缩弹簧的长度来改变在线圈断电后使动触头复位动作,分别用振动传感器和应变片传感器对接触器内经过改变的弹簧长度进行测试。在不改变灵敏度的情况下测试5次,排除偏差最大的一条线后得到实际电压折线图,选取合适的4次测试数据如图6-1、图6-2。
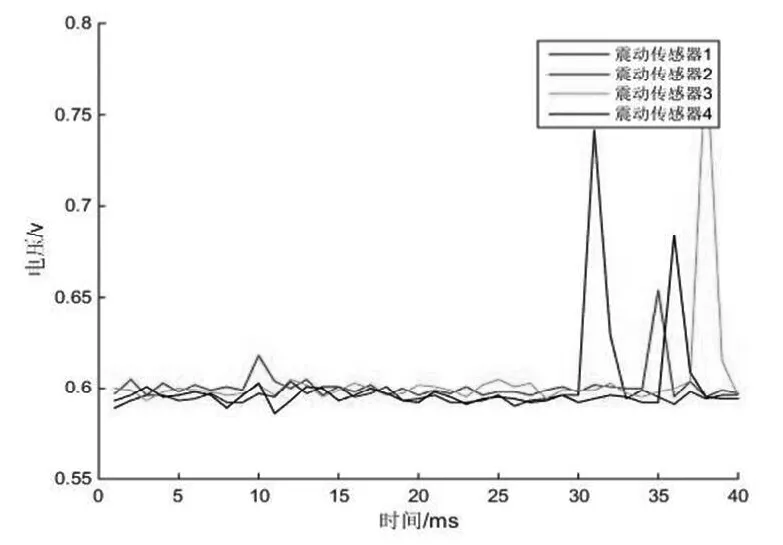
图6-1 振动传感器上电测试(压缩弹簧长度)
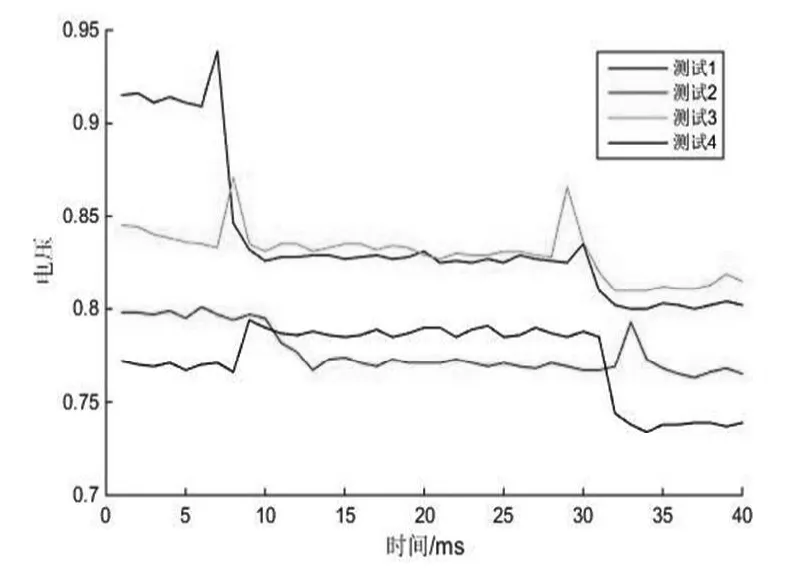
图6-2 应变片传感器上电测试(压缩弹簧长度)
从图6-1可得知在弹簧缩短的接触器中,原始传感器输出电压为0.59 V左右,触头闭合时,电压区间在0.58~0.63 V;触头断开时,电压区间在0.58~0.78 V之间。从图6-2可得知在缩短弹簧的接触器中,触头闭合时,振幅在0.028~0.035 V之间;触头断开时,振幅在0.025~0.046 V之间。
分析:通过对接触器长度改变后,从折线图分析得到,振动传感器测出的电压变化区间变小,应变片传感器测出的幅度也比正常的小很多。弹簧力公式:

K为刚度系数,F0为预压力。
由于刚度系数对弹簧力的贡献主要由弹簧变形来实现,弹簧的变形由动触头回弹产生,回弹的高度不大因此弹簧力变化小;预压力直接对弹簧力起主要作用[7]。弹簧压缩时,由于弹簧力的增大,使在触头与接触碰撞时产生弹跳幅度减小。
3.2.2 橡胶衬垫片
交流接触器的衬垫片主要起缓冲作用,减少接触器的振动与弹跳。而在直动式接触器,改变接触器衬垫片厚度可改变铁芯的行程,从而改变触头的超程。当超程过长或者过短时,触头不能可靠接触。可通过改变橡胶衬垫片的厚度,来改变接触器的稳定性与接触超程,从而测试的电压范围也会发生变化。分别用振动传感器和应变片传感器对接触器内变薄的橡胶村垫片的厚度进行测试。测试5次,排除偏差最大的一条线后得到实际电压折线,选取合适的4次测试数据如图7-1、图7-2。
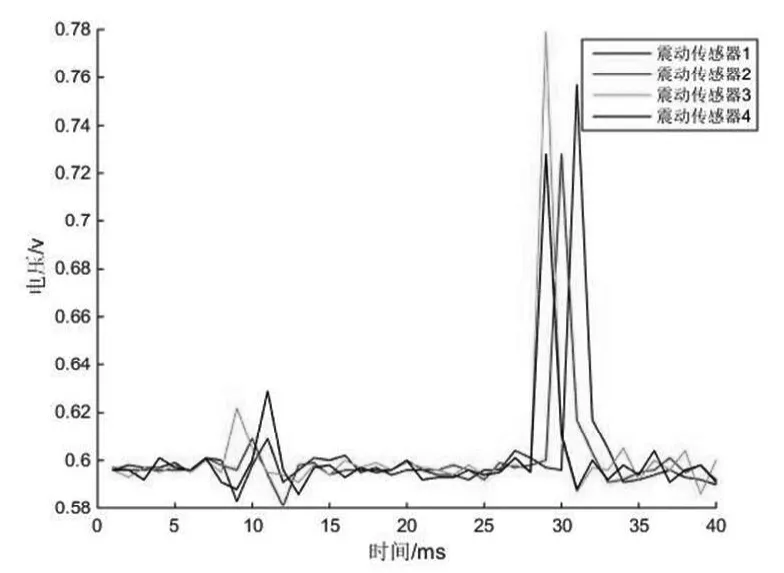
图7-1 振动传感器上电测试(改变衬垫片厚度)
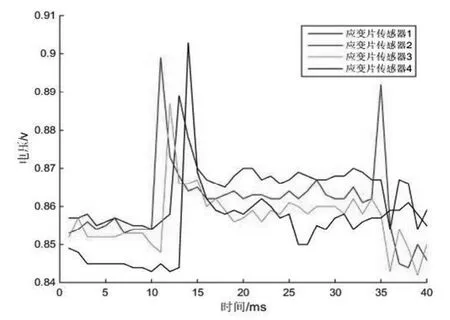
图7-2 应变片传感器上电测试(改变衬垫片厚度)
从图7-1可得知在橡胶垫片过于薄的接触器中,振动传感器原始传感器输出电压为0.59 V左右,触头闭合时,电压区间在0.596~0.618 V之间;触头断开时,电压区间在0.597~0.783 V之间。用应变片传感器测试得到实际电压折线图7-2可得知在橡胶垫片过薄接触器中,触头闭合时,振幅在0.016~0.06 V之间;触头断开时,振幅在0.012~0.05 V之间。
分析:橡胶垫片厚度改变后,从折线图分析可得知振动传感器测出的电压变化区间变小,电压下限上移,区间数值整体往高偏移;应变片传感器测出的幅度也比正常的大很多,闭合时触头振动程度比断开时的振动程度更大。在直动式接触器中,衬垫片会影响触头超程使触头无法可靠吸合、使触头振动加剧,且橡胶垫片厚度变薄时,衬垫片无法起到充分的缓冲作用而使接触器整体产生较大振动。
3.2.3 欠压
在额定电压为380 V的交流接触器中,当电压不足380 V时,最低可靠吸合电压约为额定电压的75%。在没有欠压脱扣器的情况下,无法检测到是否是欠压。下面就欠压情况下开合闸和欠压情况下开合闸临界点250 V进行实验,每组实验做6次,去除离群数据后选取合适的5次数据。
如图8-1可得知在250 V电压运行下,原始传感器输出电压为0.59 V左右,触头闭合时,电压区间在0.566~0.635V之间;触头断开时,电压区间在0.569~0.776V之间。可得知在250 V电压运行下,原始传感器输出电压为0.59 V左右,触头闭合时,电压区间在0.566~0.635 V之间;触头断开时,电压区间在0.569~0.776 V之间。用应变片传感器测试得到实际电压折线图8-2,可得知在250 V电压下运行,触头闭合时振幅在0.014~0.046 V之间;触头断开时振幅在0.012~0.038 V之间。
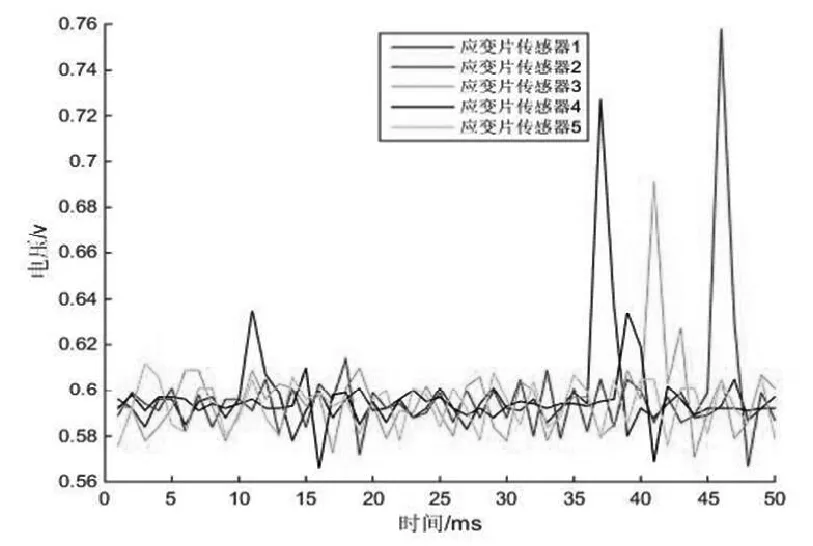
图8-1 振动传感器上电开合闸(欠压)
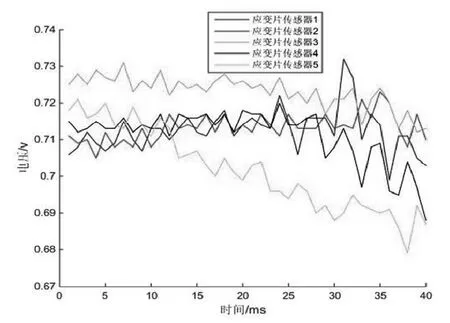
图8-2 应变片传感器上电开合闸(欠压)
分析:从振动传感器和应变片传感器测试得到的数据可知,在欠压状态下无论触头是在断开还是闭合的状态下,整条曲线都有明显的振动,且在断开的瞬间尤其明显。接触器的吸力-反力特性是影响触头闭合的重要参数,由电磁吸力与接触压力关系:

Fi电磁力,Fk反力弹簧斥力,mg为运动部件所受重力。
在250 V临界欠压条件下,线圈的电流值减小,电磁吸力F_i减小。在反力特性的作用下无法使触头可靠闭合,故在临界点产生反复的振动。当曲线全程都不平整而是呈现振动的状态时,说明已经出现了电压不稳定的现象。若使用电压、电流检测单元,在电压短时波动时,瞬时值低于设定的电压则会使脱扣器立即动作。而用此机械检测单元在电压短时低于欠电压,由于机械动能是缓慢消减,瞬时不稳定电压对于整体检测并不会产生过大影响。
4 总结
试验使用的原塑外壳结合可视化亚克力板,并不影响接触器的整体结构,不会对其性能产生影响。在改变接触器内部条件的情况下与原始弹跳波形对比能够以明显的波形变化来反映出接触器内部参数的变化。实验结果表明在不同的参数影响下,触头的弹跳变化范围有所不同,可根据此接触器外壳模块试验每一款CJ型号的接触器弹跳数值是否正常,验证设计的实用性。
⑴ 压缩了接触器内部的触头弹簧,提升了弹簧的初压力,减小接触头在碰撞时产生的弹跳。与原始弹跳波形相比波动幅值减小许多。
⑵ 改变了接触器内部的橡胶衬垫后,使触头的超程参数改变,触头不能得到正常的闭合,产生的振动比正常情况更加频繁。且接触器内部动作无法得到充分缓冲,使整体的振动加剧。通过应变片传感器测试会得到的数据较为明显,吸合与断开时的触头弹跳明显变强,整条曲线的波动明显变大。
⑶ 当在降压供电的情况下,无论接触器是否动作,触头始终都有振动,而动作时相比正常情况下,振动传感器测出电压的上限降低;应变片传感器测出,电压变化范围增大。当接触器吸合时,电压过低导致无法提供足够的电磁吸力,在反力作用下触头处于断开的临界点,此时振动十分频繁且明显。可得当曲线发生持续振动频繁时,欠压为其中的原因。且机械检测单元在电压短时波动时,基本不受影响更具有准确性。
本设计还存在一些可以改进的地方,例如:选用更加轻薄的杠杆弹性材料,减少杠杆对弹跳的影响;选用其他类型传感器如压电薄膜传感器等进行波形对比分析;采用ADAMS仿真弹跳波形对比分析数据误差。
猜你喜欢
国际骨科学杂志(2022年5期)2022-03-15 23:15:22
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
电子制作(2019年7期)2019-04-25 13:17:20
食品工业科技(2019年4期)2019-03-28 11:08:46
电工技术学报(2017年15期)2017-08-31 19:02:23
新高考·高一物理(2016年10期)2017-07-07 12:17:11
水利科技与经济(2016年7期)2016-04-25 13:03:50
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
世界海运(2015年8期)2015-03-11 16:39:05
电测与仪表(2014年15期)2014-04-04 12:05:18