
低成本实时动态载波相位差分GPS的定位精度研究
2018-09-15 07:52潘冉冉蒋浩张洪方慧冯雷何勇
浙江大学学报(农业与生命科学版) 2018年4期
潘冉冉,蒋浩 ,张洪,方慧,冯雷 ,何勇*1
(1.浙江大学生物系统工程与食品科学学院,杭州310058;2.农业农村部光谱检测重点实验室,杭州310058;3.浙江金淳信息技术有限公司,杭州310051)
精细农业是我国未来农业发展的方向,而自动导航技术是精细农业的基础。目前,在现代农业生产中应用比较广泛的自动导航技术是全球定位系统(global positioning system,GPS)和机器视觉的融合[1],因而卫星定位技术在农业生产中发挥着不可替代的作用。传统的GPS定位技术以测距码为量测信号,但因测距码的码元宽度较大,故而测量精度不高[2],无法满足精细农业对高精度的要求。而实时动态载波相位差分(real time kinematic,RTK)技术的使用显著提高了定位精度,理论上可以达到厘米级[3],满足了农业机械设备智能化控制对定位精度的要求,目前已经应用在农业领域中。
CARIOU等[4]采用RTK-GPS作为农用车辆导航的唯一传感器,对农用车辆进行非线性速度控制,发现以单一的RTK作为农用车辆导航系统是可行的;GAN-MOR等[5]测试了搭载三点悬挂装置的拖拉机RTK-GPS自动导向系统,发现在平坦路面,拖拉机三点悬挂装置的横向误差为2~3 cm;罗锡文等[6]将RTK-GPS安装在东方红X-804拖拉机上,开发了农田自动导航控制系统,且当拖拉机以0.8 m/s的速度行驶时,直线跟踪的最大误差小于0.15 m,平均跟踪误差小于0.03 m;张美娜等[7]将RTK-DGPS与惯性传感器融合来计算车辆航向偏差的结果表明,该系统平均补偿了0.08 m的横向偏差。目前,在国内农业领域中使用的RTK定位系统大多引进于国外,实际传输距离达到5 km以上的系统价格动辄几十万元人民币,而国内外低成本的RTK系统至少也要几万元人民币,而且还存在定位精度差、传输距离短等缺点。由于RTK定位技术在国内农业车辆导航中的应用还处于起步阶段,因此,对低成本、高精度的RTK技术在农业领域的应用还需要进一步探究。
本文使用的Piksi RTK系统成本不到1万元人民币,精度可以达到厘米级,且外形小,便于安装。本研究通过坐标系统转换,采用均方根误差(root mean square error,RMSE)、2倍均方根误差(root mean square error by two folds,2DRMSE)和圆概率误差(circular error probable,CEP)等精度评价指标对Piksi RTK系统静态精度进行分析;通过设计直线和圆周运动模拟试验,并通过拟合的方法对Piksi RTK系统动态精度进行评估。
1 材料与方法
1.1 RTK技术定位原理
RTK技术是一种利用GPS载波相位观测值进行实时动态相对定位的技术。与其他差分不同的是,在进行RTK测量时,基准站通过数据通信链实时地把载波相位观测值和已知坐标等信息发送给附近工作的流动用户,流动站接收到数据后利用静态相对测量的处理方法对基线进行求解,然后计算待测点的位置坐标。RTK-GPS系统的基本结构简图如图1所示。
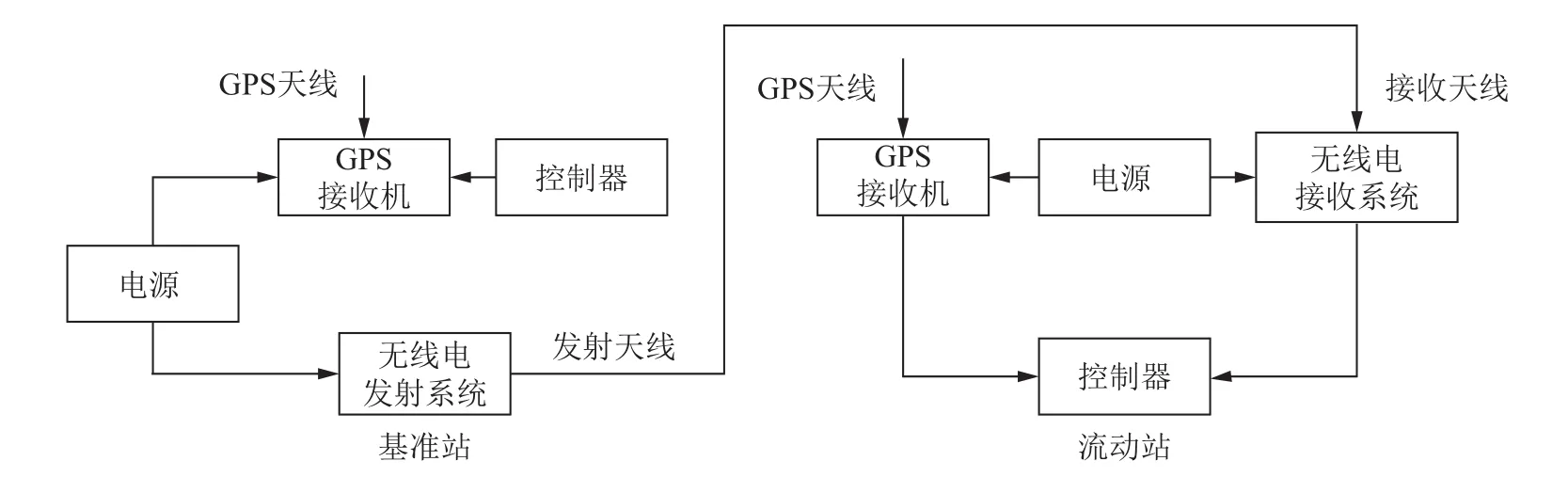
图1 RTK-GPS系统的基本结构简图Fig.1 Basic structurediagram of the RTK-GPSsystem
RTK定位技术难点在于求解相位整周模糊度。目前常用的求解方法主要有三差法、模糊度函数法、快速逼近法等。求解过程主要分为有初始化方法和无初始化方法2大类[8]。有初始化方法需要初始化固定观测一段时间,利用处理软件进行求解整周模糊度,之后的动态测量将此模糊度作为已知进行求解。无初始化方法实际仍然需要初始化,只是初始化的时间很短,为3~5 min,然后利用快速求解整周模糊度算法(ambiguity resolution on the fly,OTF)求解相位整周模糊度。RTK技术最致命的弱点是卫星信号失锁,一旦信号失锁,便需要重新初始化。
1.2 Piksi模块分析
本研究使用的差分GNSS接收机是美国Swift公司的Piksi模块,该模块是一款新型的低成本、高精度的单频RTK接收机,在开阔的周边环境条件下经过RTK固定解得到的动态水平定位精度可以达到2 cm,动态垂直精度4~6 cm,流动站与基准站的距离每增加1 km,水平和垂直精度则分别下降1 mm和3 mm,并且配套软件的用户界面开源,方便用户进行二次开发。表1为几种相似的RTK接收机的基本性能参数对比。表中数据均为官网标称数据,但考虑到农田环境的特殊性,所有RTK产品在实际应用过程中的精度均有待考究。
Piksi要实现厘米级的相对定位精度,达到农田车辆导航的使用需求,整个RTK系统至少需要2个Piksi模块。整个Piksi RTK系统包含:2个GPS天线板;2根USB线;2根陶瓷天线,主要用来接收数据传输电台的信号;2个数据传输电台,频率915 MHz,实现观测值的互相传输;4条备用串口线;2根Linx Technologies公司生产的GPS外置高增益天线;2个Piksi接收器;2根电台线。
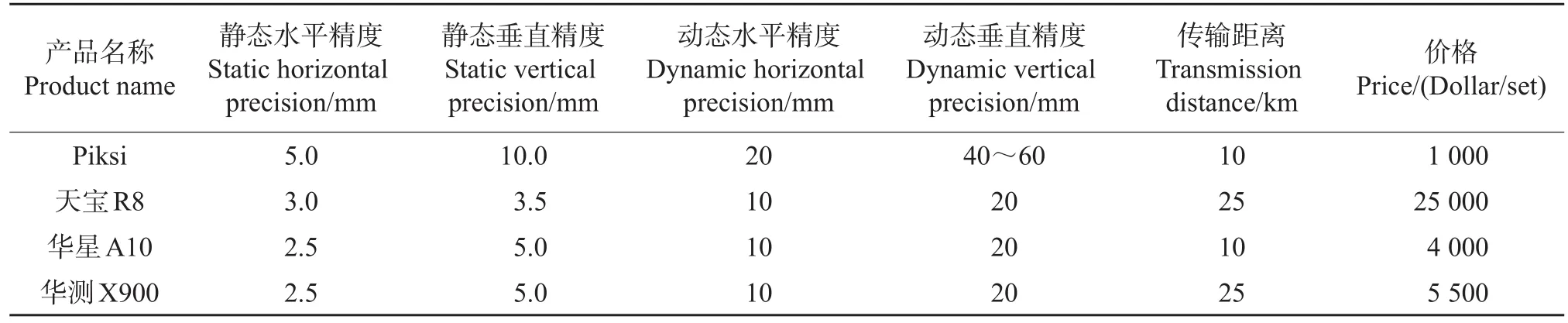
表1 RTK接收机的基本性能参数对比Table 1 Comparison of basic performance parameters of RTK receiver
1.3 空间大地坐标与导航坐标转换
为了便于进行精度分析和数据研究,需将Piksi接收机采集的位置(position)文件中的空间大地坐标系(latitude-longitude-height)的位置信息转换成平面坐标的NED(north-east-down)数据。首先,将位置信息从空间大地坐标系转换成空间直角坐标系,然后再从空间直角坐标系转换到平面坐标系。我们选择国际通用的WGS84椭球为参考模型,长半轴a值为6 378 137 m,短半轴b值为6 356 752.3 m,其他参数如下:

卯酉圈曲率半径(法线长度)

首先从大地坐标系转换到空间直角坐标系,获得地心地固坐标系的坐标(X,Y,Z),进行如下计算:


然后将空间直角坐标系投影到平面坐标系,在局部相切平面系里一定要给出原点。本次试验将所有数据的均值坐标作为处理过程中的原点,进行矩阵转换:
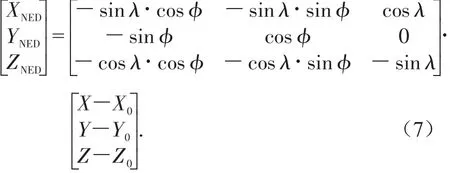
经过(4)到(7)的计算,将大地坐标(λ,φ,h)转换成平面坐标(XNED,YNED,ZNED),单位为m,使导航过程的位置显示更加直观。
2 试验与数据处理
2.1 系统搭建
由于Piksi模块的GPS外置天线需要跟踪卫星信号的载波相位信息,故与普通GPS接收器相比,它对周边环境更加敏感,因此在操作时要对周边环境进行检查,保证天线与所在的地平线的30°水平角内无障碍物遮挡,不可将GPS外置天线放在室内,也不能放置在笔记本电脑背后,附近更不可有高楼和树木遮挡,即Piksi必须远离视角内的任何障碍物。
第一步,设立基准站:在Piksi使用前,外置天线用螺钉安装到天线板上,为了天线的稳定,一端最好固定在三脚架的顶端,以保证开阔的视野,然后用USB线将Piksi连接到电脑,利用该系统的配套软件Console进行基站参数设置,完成后断开电脑与基站模块的连接,使用移动电源单独供电。第二步,搭建流动站:流动站模块的硬件连接步骤与基准站搭建一样,与电脑相连接时进行流动站的参数设置。第三步,系统验证:从开始的低精度RTK浮动解到最后获得厘米级RTK固定解的过程需要10 min左右的时间。
2.2 Piksi模块静态定位精度分析
2.2.1 静态定位精度评价指标
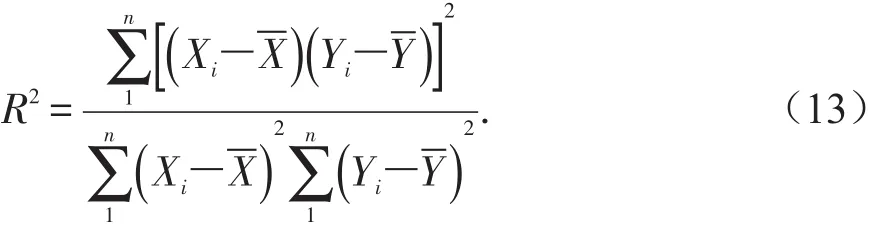
静态定位精度有4个评价指标,分别为标准差(σ)、圆概率误差(CEP)、距离均方根误差(RMSE)、2倍均方根误差(2DRMSE)。其中:标准差用来衡量数据本身离散程度,距离均方根误差用来衡量观测值与真实值之间的偏差。RMSE、2DRMSE和CEP均可由标准差计算得来,相关公式如下:
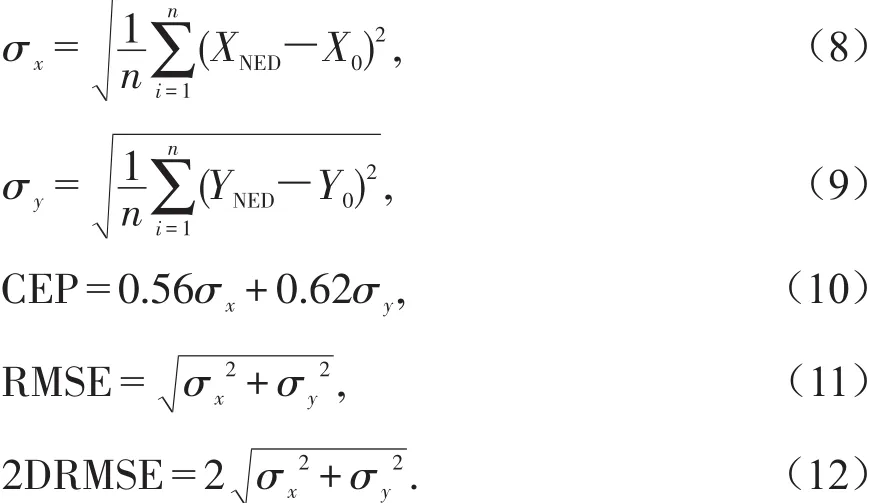
利用坐标转换后局部相切平面系的坐标,计算出各个测量点到真实点的坐标距离(不考虑海拔),真实点坐标取所有坐标的平均值,将其默认为原点。由于GPS的位置误差符合正态分布,按照正态分布的原理计算标准差(σ),可用来衡量获取的数值平均值的离散程度。查询正态分布表可得,CEP、RMSE、2DRMSE分别代表测量点以50%、68%、95%的概率落在特定半径的圆内,其中圆心代表天线的实际位置,半径的大小可以作为定位精度的评估指标。
2.2.2 单点静态定位精度试验
定位精度由于受传输过程和接收设备等误差的影响,GPS设备给出的精度一般高于实际使用时的精度。为了完成本课题精度的验证要求,先进行单点定位测试。第一处测量点选择在浙江大学紫金港校区农生环学部6楼视野开阔处,采集1 h的数据。第二处选择在农生环学部7楼顶楼,同样采集1 h数据。
2.2.3 静态相对定位精度试验
静态定位除了单点定位以外,还有静态相对定位,其中静态RTK精度分析是精密测量的关键,也是目前大多数普通用户针对RTK精度进行评判的依据。为了保证数据的可靠性,本试验共进行4次,分别安排在浙江大学紫金港校区医学院、月牙楼、金工中心和西区实验田,每次试验各采集2~3个点的数据,每个流动站的数据采集时间为1~2 h。其中基准站的位置采用单点定位的方式获得,采集过程均采用三脚架对Piksi进行固定,以尽可能地减少周边障碍物遮挡对精度的影响。
2.3 Piksi模块动态定位精度分析
RTK系统相对定位精度除了静态相对定位精度之外,还包括动态相对定位精度。对于静态相对定位精度的分析,常用的方法有很多,如上文提及的圆概率误差(CEP)、距离均方根误差(RMSE)。Piksi RTK系统给出的精度一般都是指静态定位精度,但在实际应用中对设备的使用要求是户外运动状态,所以静态定位精度是否能够满足用户对精度的使用需求尚未可知。近些年有一些文献涉及动态定位精度分析,而大多都是用高精度的设备去验证低精度的模块,但动态情况下对测试条件要求较高,厘米级精度的定位系统更需要严格控制各项误差,对此目前国内相关研究很少。本文利用拟合方法对动态定位精度进行评估,自行设计了圆周、单直线和双直线2种运动状态下的3次试验。
2.3.1 直线运动
直线运动是农田车辆导航最基本的运动形式,对直线运动状态的模拟在一定程度上可以很好地反映Piksi RTK系统的实际使用情况。为了减少直线运动中Piksi接收机因运动轨迹偏移带来的误差,选用2根2 m的直线导轨和2个法兰滑块搭配进行试验。将基准站Piksi固定在一端,流动站Piksi模块分别固定在三脚架上,室外天线分别固定在导轨滑块上,通过控制滑块沿导轨的运动来实现流动站的直线运动模拟。将得到的数据进行直线拟合,并通过计算相关系数(R2)和点到拟合直线的距离判断RTK的单轨直线运动精度;同时,通过判断双轨运动时2条拟合直线间的距离和实际距离间的偏差,验证线性回归分析对动态精度测试的可行性。
2.3.2 圆周运动
采用圆周运动模拟测试,可对Piksi RTK系统在不规则运动下的动态定位进行比较精确的分析与评估。为了测试Piksi沿曲线运动的动态定位精度,设计圆周运动,采用的旋转支架可围绕中心轴360°旋转,在试验过程中将流动站的Piksi模块用三脚架固定,GPS室外天线则固定在旋转支架的平台上,为减少人为误差和消除运动中因惯性带来的误差,中间旋转轴完全固定,由于GPS天线具有部分磁性可吸附在支架上,因此可保证Piksi位置的稳定。试验以470 mm的半径在不同速度下旋转,对位置数据进行采集,转换后进行圆的拟合,根据拟合后的圆心、半径及圆上各点距离圆心的距离与实际情况的偏差,评估Piksi圆周运动的定位精度。
3 结果与讨论
3.1 Piksi模块静态单点定位精度
该Piksi默认PVT刷新频率为10 Hz,1 h数据量可达3.6×104个。由于数据量过大,截取部分数据进行分析,经过坐标转换,评价指标统计结果见表2。从中可以看出,2次测量所得评价指标基本一致,说明Piksi设备获取的数据有效。将所有测量数据用Matlab进行处理,结果(图2)显示:2幅图中3个圆由里到外所代表的指标依次是CEP、RMSE、2DRMSE;Piksi设备的单点定位精度在8 m的置信度为95%左右,与普通GPS设备精度相仿,因此,可在其他要求不高的测试试验中当作一般GPS使用。
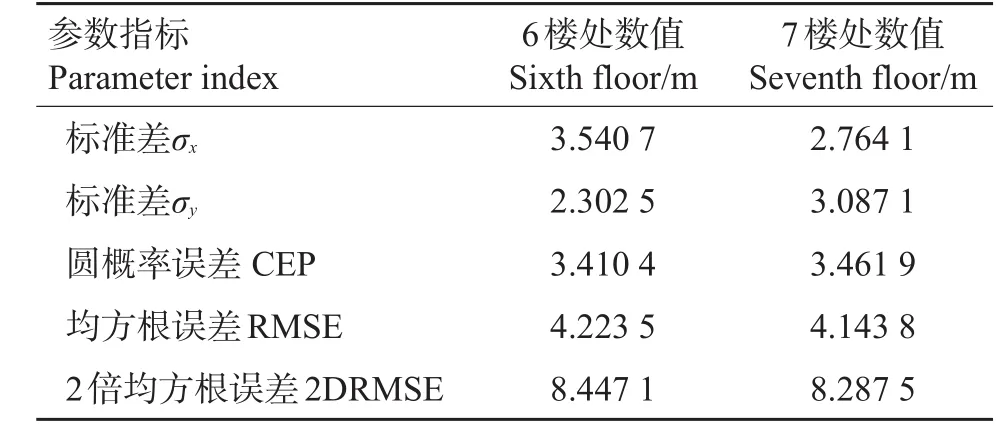
表2 单点定位精度评价Table 2 Evaluation of single point positioning accuracy
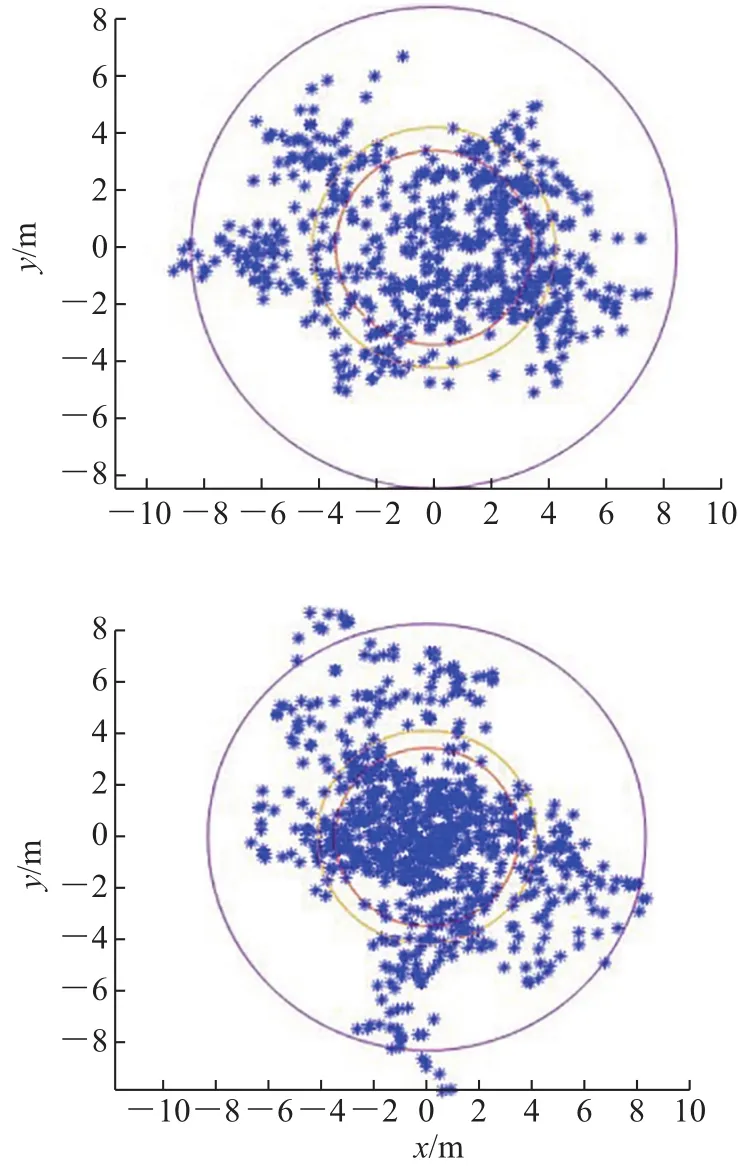
图2 单点定位精度分析Fig.2 Analysisof singlepoint positioning accuracy
3.2 Piksi模块静态相对定位精度
观察采集的流动站数据,发现经纬度数据在小数点后第7位开始变化,由于数值较小,精度需通过进一步计算得出,统计结果如表3所示。从中可以看出,4次试验的静态RTK精度均已达到了厘米级的相对定位精度,符合Piksi模块给出的精度参数。将所有流动站的数据继续用Matlab进行处理,分布如图3所示。从中可以看出:每幅图中3个不同颜色的圆由里到外所代表的指标依次是CEP、RMSE、2DRMSE;Piksi RTK系统的静态定位精度为1.5 cm(2DRMSE,置信度95%)的有3次,精度达到1 cm(2DRMSE,95%)的有1次,据此判定Piksi RTK系统的静态定位精度为1.5 cm(2DRMSE,95%)。
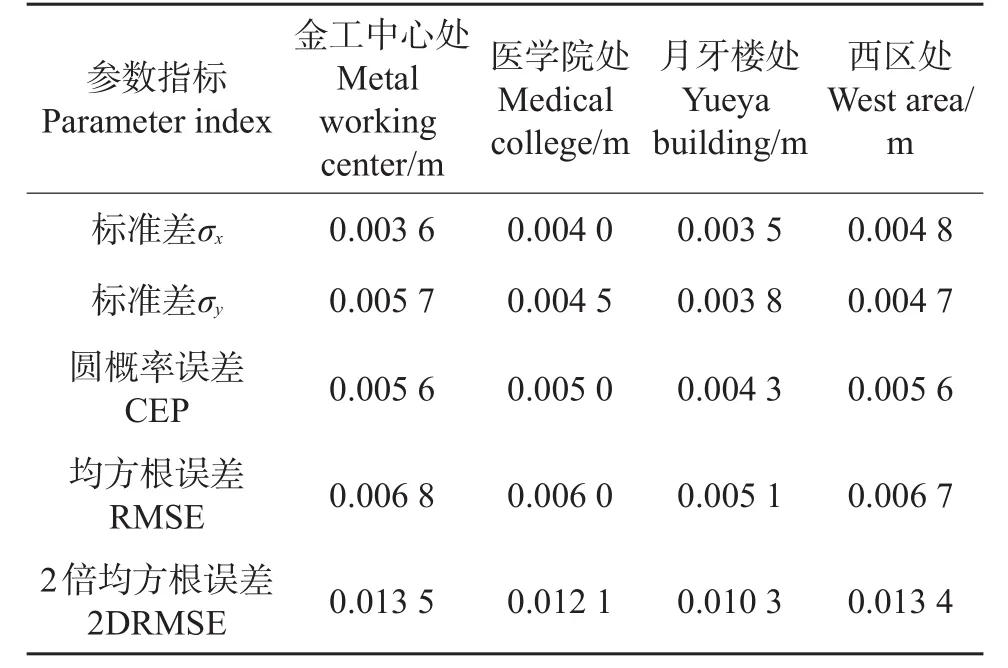
表3 静态RTK定位精度评价Table3 Evaluation of static RTK positioning accuracy
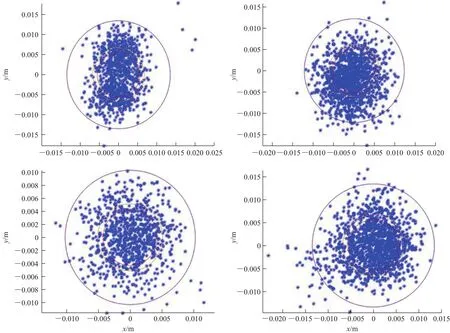
图3 Piksi RTK静态定位精度分析Fig.3 Analysisof static Piksi RTK positioning accuracy
3.3 Piksi模块动态直线定位精度
在单直线试验中,为了更好地模拟车辆田间运行的速度,进行了4次试验,平均速度分别为0.4、0.7、1.3、2.3 m/s,相关参数如表4所示。从中可以看出,虽然4次试验得出的直线斜率不完全相同,却相差不大,且单次运动的数据与直线的拟合程度非常好,相关系数极高。
利用公式计算出待测点到直线的距离,对数据进行最小偏离距离分析。由表5可以看出,4次试验的平均偏移距离约4 mm,在直线运动下通过拟合得到的动态RTK系统定位精度在1.5 cm以内。
直线双轨运动试验的测试速度是0.8 m/s,2条直线的参数如表6所示。从中可以看出,虽然相关系数有所降低,但线性回归拟合的2条直线基本平行。由图4可知,2条直线的距离约为30.2 cm,实际2个导轨之间的平行距离为30 cm,初步表明通过直线拟合验证动态精度的估算方法可行,并且可靠性比较高。因此,可以初步认为Piksi RTK系统在直线运动下通过拟合得到的动态定位精度约为1.5 cm。但由于直线拟合得出的是点到直线的最短距离,整体误差偏小,考虑到实际运用中测量点与真实值的对应关系,据此判定Piksi RTK系统的动态误差为3~5 cm。
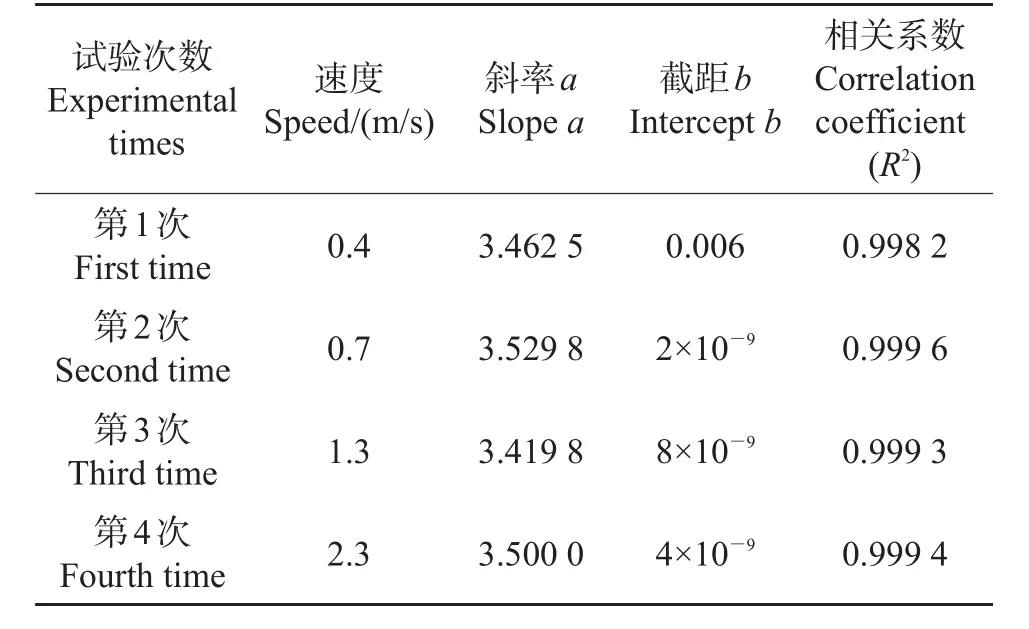
表4 Piksi RTK系统单直线运动参数Table 4 Single linear motion parameters of Piksi RTK system
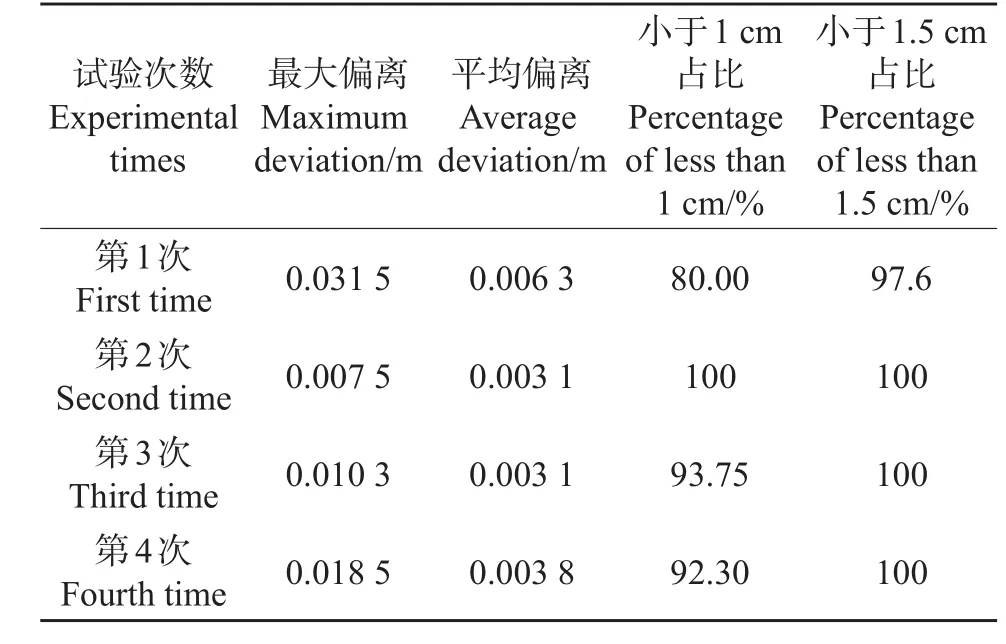
表5 Piksi RTK系统直线运动精度评估分析Table 5 Evaluation of linear motion accuracy of Piksi RTK system
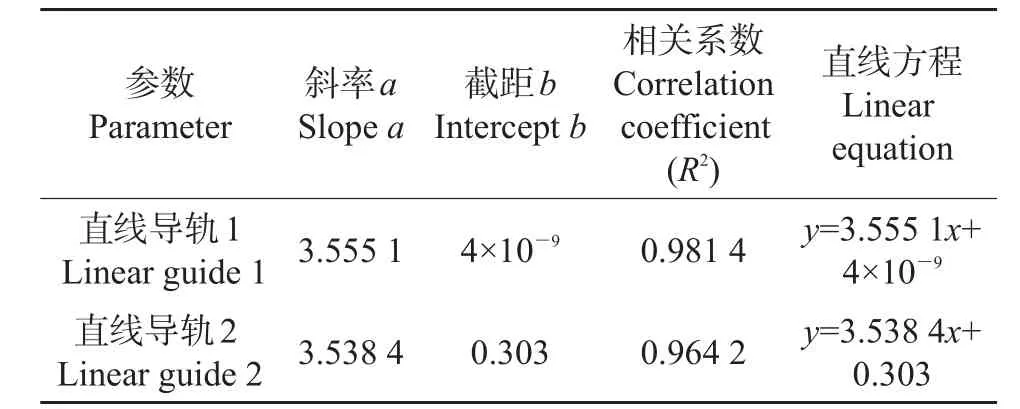
表6 Piksi RTK系统双直线运动参数Table 6 Bilinear motion parameters of Piksi RTK system
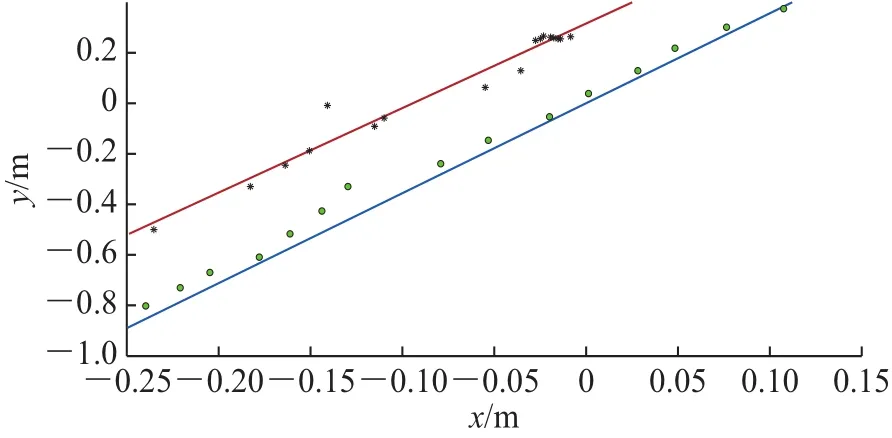
图4 Piksi RTK系统动态双直线拟合Fig.4 Dynamic bilinear fitting of Piksi RTK system
3.4 Piksi模块动态圆周运动定位精度
在4种不同的旋转速度下进行了4次试验,拟合参数如表7所示。从中可以看出,4次试验的圆心位置稍有浮动,但是半径与实际测量的47 cm基本吻合,说明相对位置变化不大,相对定位精度波动较小。拟合的圆周图像如图5所示。
根据4次不同速度下的试验拟合程度,计算测量点到拟合圆心的距离与拟合半径的差,将此作为圆周运动下相对精度的评价指标,结果如表8所示。从中可以看出,随着速度的提升,误差略有增加,但每次试验的最大距离基本都在1.5 cm以内。这说明在圆周运动下通过拟合得到的动态精度约为1.5 cm。同样,因拟合测量的是最短距离,故整体误差偏小,考虑到实际运用中测量点与真实值的一一对应关系,Piksi RTK系统的动态误差为3~5 cm。
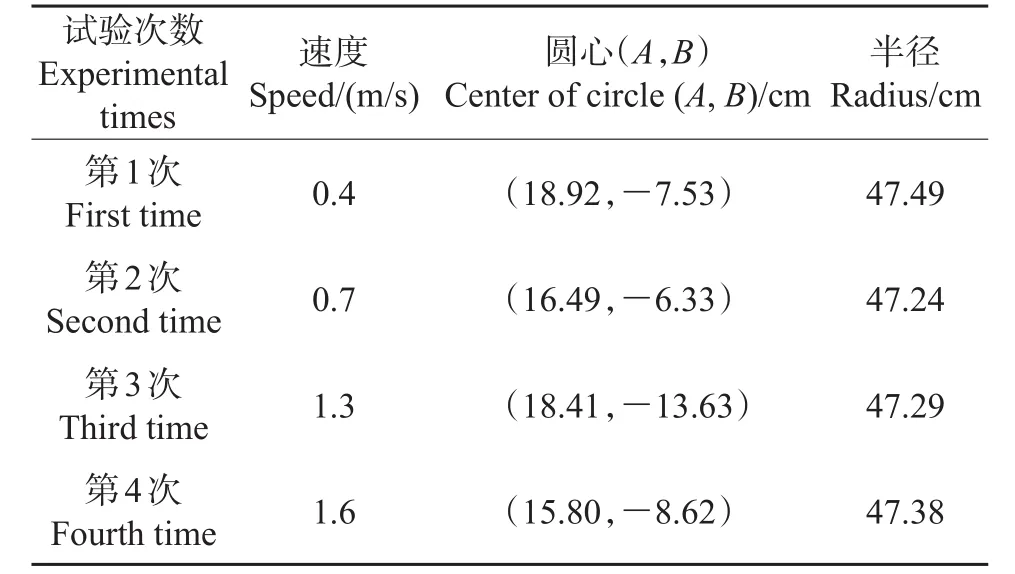
表7 Piksi RTK系统圆周运动拟合参数Table 7 Fitting parameters of circular motion of Piksi RTK system
4 小结
本文对Piksi RTK系统进行了静态和动态精度测试,并对其性能进行了评价分析,具体的研究成果如下:
1)提出了Piksi RTK系统静态精度的3种评价指标CEP、RMSE、2DRMSE,并使用这3种指标对定位数据进行处理分析,测得单模块定位精度约为8 m,RTK静态定位精度约为1.5 cm,基本满足农田车辆导航的使用要求。
2)设计了直线、圆周运动试验对Piksi RTK动态精度进行评估分析,采用了直线拟合方法对数据进行处理,发现在4次不同速度下的直线运动拟合得到的RTK定位精度约为1.5 cm。此外,还设计了双直线运动,对直线拟合评估系统动态精度方法的可行性进行了验证,证明了直线拟合的可适用性。圆周运动可用于检测Piksi RTK系统不规则运动的精度,对转换后的数据进行圆周拟合,获得4次不同速度下的最佳拟合圆周,通过分析距离偏差获得在圆周运动下的动态精度约为1.5 cm。考虑到实际应用过程中点对点的问题,拟合分析得到的测量误差整体偏小,据此判定Piksi RTK的实际动态精度为3~5 cm。
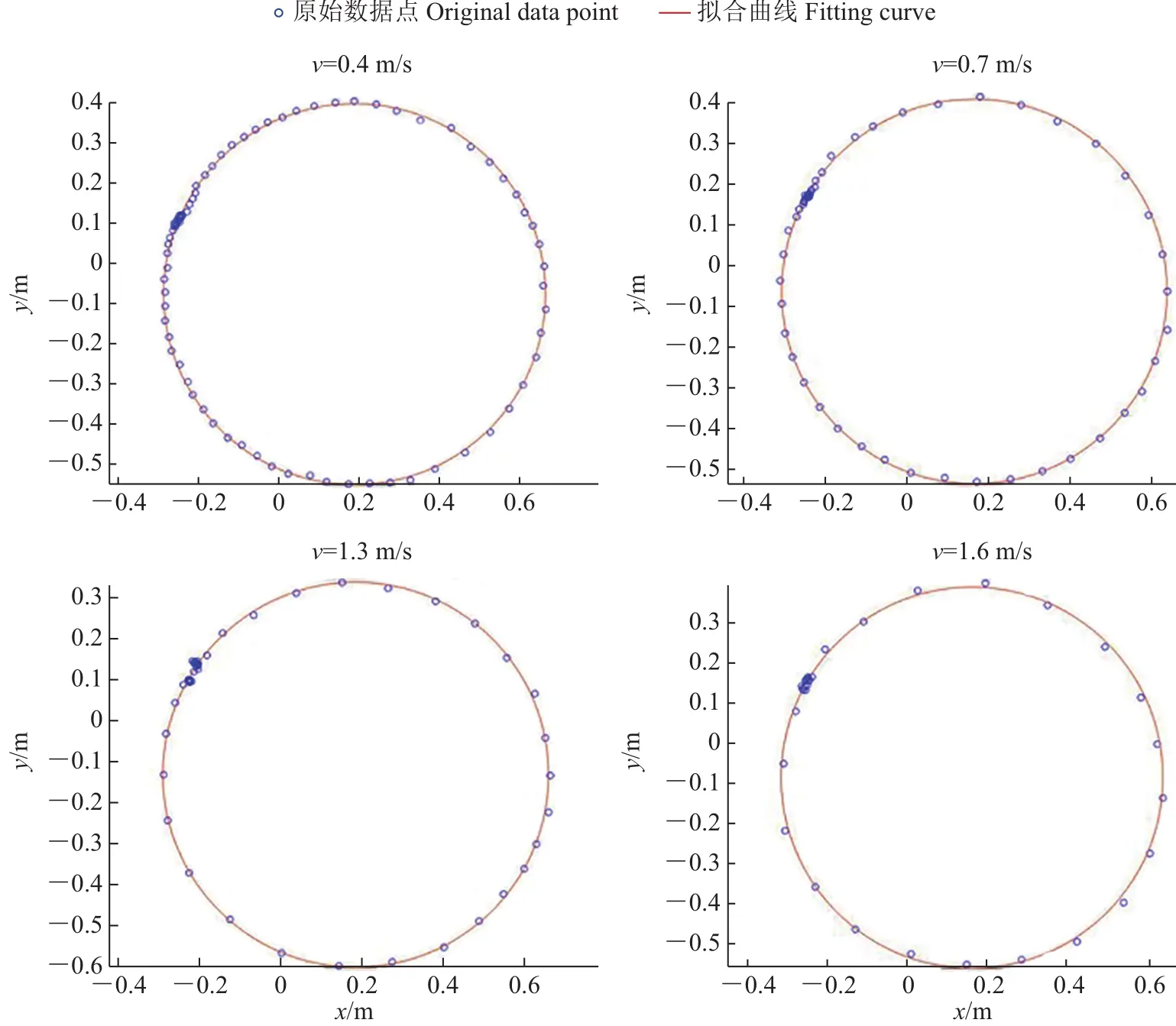
图5 Piksi RTK系统圆周运动拟合Fig.5 Circular motion fitting of Piksi RTK system
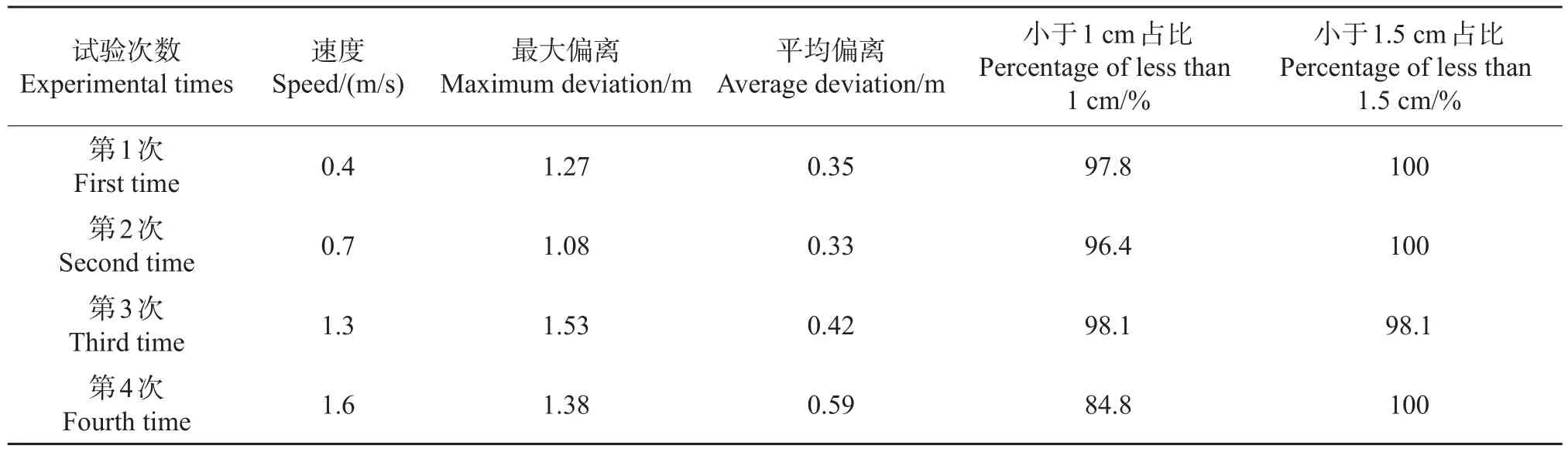
表8 Piksi RTK系统圆周运动精度评估Table8 Evaluation of circular motion accuracy of Piksi RTK
对Piksi RTK-GPS系统的性能进行试验分析,表明该系统具有高性价比、操作简单、应用广泛等优点,但也存在传输距离受限、信号丢失、可靠性较低等缺点。因此,将该系统用于真实农田环境定位还需要进一步改进,如改进传输电台和天线,使传输距离得到提高,在信号缺失的情况下利用视觉或惯导辅助导航等。
猜你喜欢
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
雷达学报(2017年1期)2017-05-17
中国高新技术企业(2015年15期)2015-05-04
专用汽车(2015年1期)2015-03-01
