
无人机在农业中的应用现状与展望1
2018-09-15 07:52陈鹏飞
浙江大学学报(农业与生命科学版) 2018年4期
陈鹏飞
(中国科学院地理科学与资源研究所/资源与环境信息系统国家重点实验室,北京100101)
农业是同时受到自然条件与社会经济条件双重制约的脆弱性产业,农田管理中涉及农业生产每一个环节的决策都需要多门类、全方位的信息支撑。长期以来,由于缺乏有效信息支持,农民往往向田间施入过多化肥、农药[1]。为了缓解农业资源紧张与环境压力巨大之间的矛盾,未来农业的发展趋势必将从“粗放”走向“精细”[2]。
遥感技术、地理信息技术、地面传感器及无线网络技术等现代信息技术的应用,为实现作物长势精准探测、开展精细化田间管理提供了技术支撑。其中,遥感技术具有大面积同步监测的优势,可实现对作物长势空间分布信息的精准获取。目前,基于卫星、地面基站和载人飞机的遥感探测技术进行作物长势监测、农作物种类细分、作物品质/病虫害监测及农场管理的研究[3-5]已有很多。但随着对遥感数据需求的急剧增长,目前遥感观测系统还存在技术和成本上的问题。比如:卫星遥感存在重访周期长、时间分辨率低的缺陷;地面基站遥感获取的数据存在观测范围小、工作量大、视野窄等问题[6];载人飞机遥感存在成本高、一次飞行准备时间长的缺陷。近年来,无人机遥感技术以其机动、灵活、时效性强、容易操作等特点,被逐渐应用于农情遥感监测中,已成为遥感对地观测的又一重要应用。此外,无人机携带药箱等机载设备,可代替人对作物开展农事活动,以提高工作效率,节约人力成本。但目前无人机在农业生产中的应用还处于起步阶段,有许多问题亟待进一步研究。本文从农业无人机自身的技术特征,以及无人机在作物长势监测、产量估测、病虫害监测、氮素营养诊断和精准田间管理中的应用等方面,系统地分析和总结了其应用现状,并提出了相应的发展建议,以期为相关领域的深入研究提供参考。
1 国内外无人机技术在农业生产中应用现状
1.1 农用无人机的硬件技术状况
在农业生产中,需要根据不同的使用目的选择不同形式的无人机飞行平台及载荷(对地观测传感器、小型农机等)。
1.1.1 飞行平台
按飞行平台构型,无人机可以分为固定翼无人机、无人直升机和多旋翼无人机3类及其相关变种。固定翼无人机是将螺旋桨或者喷气式发动机产生的推力作为飞机向前飞行的动力,主要的升力来自机翼与空气的相对运动,所以其必须要有一定的相对速度才会有升力来飞行。固定翼无人机具有航程远、飞行速度快、续航长、飞行高度高等优点,但也存在需要滑行跑道、操作相对复杂、不能根据需要对重点区域做悬停拍摄等缺点。在农业中,固定翼无人机主要应用于土地确权[7]、粮食估产[8]、作物种类识别[9]等领域。相对于固定翼无人机,多旋翼无人机目前在农业中应用更为广泛。它主要靠多个旋翼产生的升力让无人机起飞,具有可垂直起降、空中悬停、操作简单等优点,但也存在飞行速度慢、续航时间短等缺陷[10]。在农业中,多旋翼无人机的应用领域也已涉及粮食估产[11-12]、作物种类识别[13]、作物长势监测[14]、农药喷施[15]等领域。与多旋翼无人机相比,无人直升机的旋翼更大,飞行稳定,抗风性好。在施药方面,无人直升机可形成单一风场,且向下气流强劲,可以打透茂密的枝叶,施药效果较好;另外,它也可用于作物辅助授粉等领域[16];但无人直升机的价格相对较高。总之,未来可根据不同飞行任务的特点,合理搭配不同类型无人机,达到低成本、高效作业的效果。
1.1.2 机载对地观测传感器
根据农情监测需求,可用于无人机机载对地观测的传感器主要包括数码相机、多光谱传感器、热像仪、高光谱传感器、激光雷达传感器等(表1)。其中,数码相机和多光谱传感器由于具有成本低、类型多样的特点,是目前人们开展基于无人机的农情遥感监测使用最多的设备。数码相机包括日本Canon公司的5D MarkⅡ、日本Nikon公司的D800ED7000、丹麦Phase One公司的P65IQ180等型号[17]的相机,其主要区别在于成像感应器类型、像幅大小等。多光谱传感器主要包括法国Parrot公司的Sequoia、美国Tetracam公司的ADC Lite、德国Cubert公司的S128等型号的传感器。不同传感器在光谱波段设置、成像方式、空间分辨率、价格等方面存在差异。热像仪可获得作物冠层温度信息,便于监测作物蒸腾及旱情;高光谱传感器能获取作物冠层更精细的光谱信息,有利于准确获取作物长势信息;激光雷达传感器则能获取丰富的点云信息,可有效获取高精度的作物水平和垂直冠层结构参数。以上3种设备由于价格较高、成像及影像后处理技术较复杂等,它们在农情监测方面的应用还不多见。常见的无人机机载热像仪有德国Optris公司的PI400、美国FLIR公司的SC655等;机载激光雷达传感器有美国Velodyne公司的VLP-16/HDL-32/HDL-6激光雷达扫描仪等。在机载高光谱成像仪方面,按成像方式可分为推扫成像和凝视成像。由于成像模式的限制和无人机飞行过程中容易抖动等影响,采用推扫成像的高光谱成像仪数据的几何校正是难点,需要配合高精度的定位定姿系统(positioning and orientation system,POS),经过复杂计算才能获得比较满意的影像;而凝视型高光谱成像仪采用画幅成像方式,可以在无POS系统的条件下完成图像的几何校正和拼接,但是由于不同波段成像有时间差,其获取数据处理的难点在于光谱信息的校正[18]。相对而言,目前在无人机上凝视型高光谱成像仪的验证与应用研究较多,主要有德国Cubert公司的S185,芬兰Senop公司的RHC。总体而言,不同传感器具有各自的用途和特点,需要根据实际需求来选配。另外,耦合各类传感器,实现基于无人机的多载荷观测、多类型数据同步获取将是未来的重要发展方向之一。
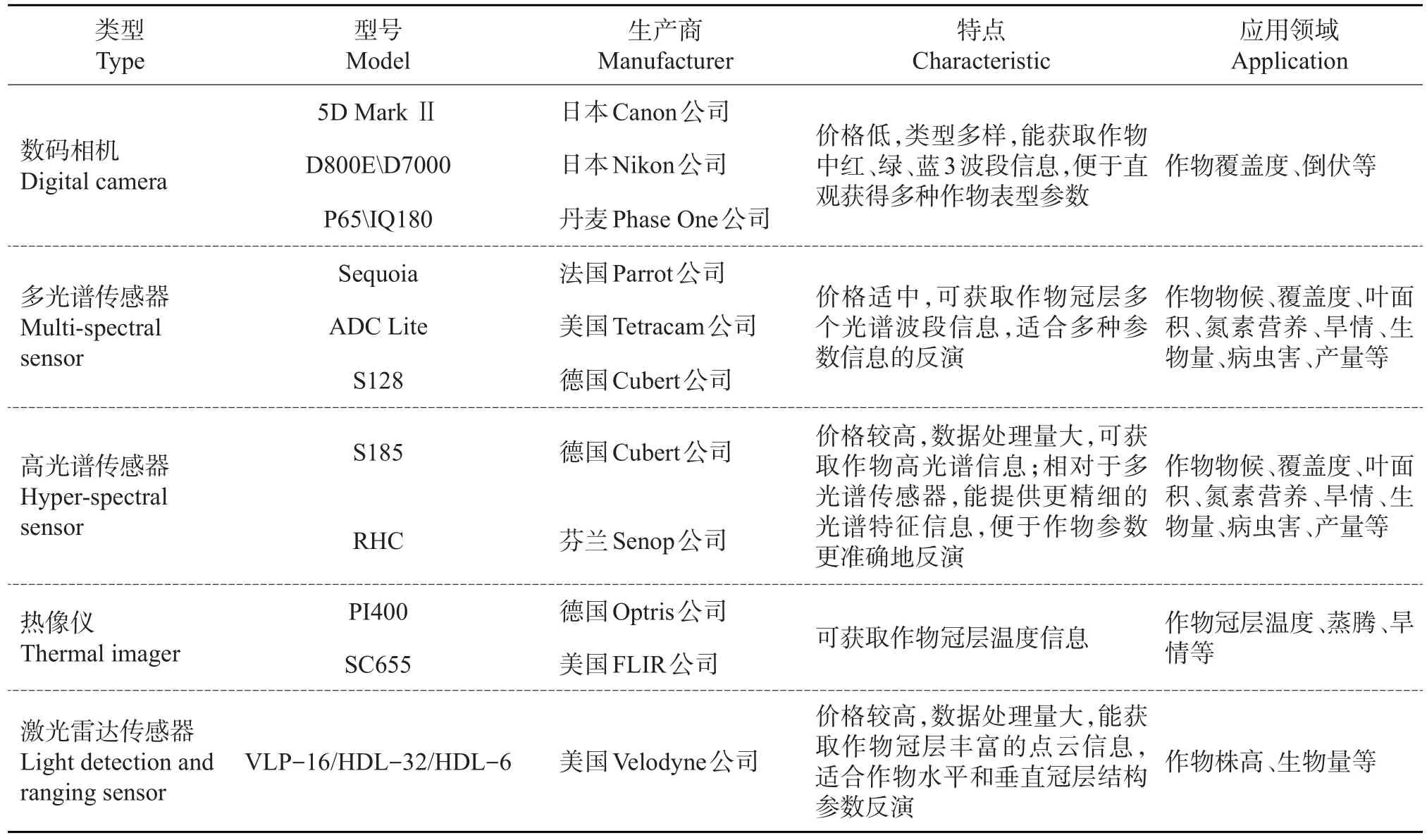
表1 常见无人机对地观测传感器Table 1 Common ground observation sensors of unmanned aerial vehicle(UAV)
1.1.3 机载农机设备
无人机搭载农机设备进行田间作业,具有效率高、成本低、对作业人员伤害小等特点。目前已有的搭载在无人机上的农机设备主要有药箱及其施药控制系统、肥料箱及其施肥系统、料仓及播种系统等。基于无人机方面的研究,王大帅等[19]设计了变量施药控制系统,可根据飞行参数自动调整施药流量,改善已有无人机施药系统存在的雾滴分布不均匀、重喷、漏喷等问题;MEIVEL等[20]设计了一款基于无人机的施肥和施药装置,无人机飞行中的施肥量或施药量可根据目标作物的特征进行远程控制;美国DroneSeed公司研发了一款高速播种无人机,可利用压缩空气将种子射入土壤中;FELISMINA等[21]将播种机与无人机结合设计了基于无人机的作物播种系统。这些研究促进了无人机在施肥、施药、播种等农事活动中的应用,但仍然存在许多不足。在无人机施药方面,施药系统的雾化效率、施药过程的雾滴飘移、飞行速度与药剂流量精准控制等问题还需深入研究。与施药系统相同,无人机对液态肥料的施用同样存在着雾化效率不高、雾滴发生飘移、施肥不均匀等问题;在施用固态肥时,设计普适性施肥系统以满足不同颗粒大小、质量的肥料撒施的需要,明确不同类型肥料的飘移规律与撒施均匀性是亟待解决的问题。在无人机播种方面,还面临着实现精准播种(播种深度、行间距)的一系列问题。
1.2 农用无人机的应用领域
1.2.1 作物长势监测
长势是指作物生长的状况与趋势[22],常用的衡量指标包括叶面积指数、生物量、株高等。陆国政等[23]利用八旋翼无人机搭载高清数码相机监测小麦育种小区,成功反演了各小区株高等信息;田明璐等[24]利用无人机搭载高光谱传感器S185获得了棉花冠层高光谱信息,并基于获得的数据,通过构建光谱指数,结合偏最小二乘算法成功反演了棉花叶面积指数;YUE等[25]同样基于无人机搭载高光谱传感器S185,利用光谱指数与偏最小二乘算法结合的方式反演了小麦生物量信息。但在长势监测方面,目前已有的研究多基于无人机观测数据,采用光谱指数法或偏最小二乘法来开展参数反演,还缺少对其他方法的研究和应用。
1.2.2 作物产量估测
无人机遥感凭借其较高的空间分辨率和机动、灵活的特征,一方面可以有效获取作物在关键生育期的光谱信息,便于对产量进行有效反演;另一方面可实现对地块尺度产量的精准估测,较适合小尺度田块的估产工作。KEFAUVER等[26]利用八旋翼无人机搭载多光谱相机等设备获取大麦冠层光谱信息,通过计算多种常用光谱指数,基于逐步多元回归法建立了大麦产量的估测模型;ZHOU等[11]利用无人机搭载多光谱传感器和数码相机获取水稻多时相影像数据,结合光谱指数和多元回归算法建立了基于多时相光谱指数反演水稻产量的模型;DU等[12]基于无人机搭载传感器获取小麦多光谱影像信息,通过计算多种常用光谱指数并结合逐步多元回归算法,建立了小麦产量的估测模型。以上研究为基于无人机开展作物产量估测提供了样例,但相关研究还多停留在试验阶段,建立的模型基本都是经验性的回归模型,还缺少对无人机遥感估产模型机制的探索和验证工作。
1.2.3 作物氮素营养诊断
氮素是作物生长、发育所必需的营养元素,在提高作物光合能力,增加同化产物等方面起着重要作用[27]。对于大多数土壤而言,当季有效氮含量不能满足作物生长需要时,需要添加外来氮源,因此,氮肥管理是实现以高产优质为目标的作物生产中最为重要的环节之一[28]。无人机遥感具有空间分辨率高的特点,能实现田间作物氮素营养状况精细填图,对氮肥精准管理具有重要意义。秦占飞等[29]利用八旋翼无人机搭载S185机载成像光谱仪获取水稻冠层高光谱信息,通过构建新的诊断氮素的光谱指数反演了水稻叶片全氮含量信息;LIU等[30]基于无人机获取小麦冠层高光谱影像,利用人工神经网络法建立了反演叶片氮浓度的模型,很好地预测了小麦拔节期、挑旗期、开花期的叶片氮浓度信息;JAY等[31]利用无人机获取甜菜冠层光谱影像,基于光谱指数建立了反演甜菜冠层氮含量的模型。但目前的研究多集中在作物氮素营养指标反演模型构建方面,而在反演作物氮素营养状况指标信息的基础上,怎样判定作物氮素营养亏缺情况,并基于无人机影像生成变量施肥处方图还有待于进一步研究。
1.2.4 作物病虫害监测
据联合国粮农组织估计,世界粮食产量常年因病害损失14%,虫害损失10%[32]。农作物病虫害从小范围发生到爆发或流行受到诸多因素的影响,主要包括气候特点、作物品种、种植习惯及防治情况等[33-34]。因此,基于无人机遥感机动、灵活的特征,对作物病、虫情发生程度及范围进行及时探测,开展有效防治,对于减少粮食产量损失具有重要意义。DIGENNARO等[35]基于无人机搭载多光谱传感器获取葡萄冠层光谱影像,发现归一化植被指数与叶片条纹病症状间有很好的相关性,认为可基于此较好地识别葡萄叶片条纹病信息;SUGIURA等[36]利用八旋翼无人机搭载数码相机获取马铃薯冠层图像,研发图像自动识别技术以判定马铃薯晚疫病的发生程度,为马铃薯晚疫病的快速检测提供了新的技术手段;HUNT等[37]利用六旋翼无人机搭载多光谱相机获取了马铃薯冠层影像信息,发现可以基于面向对象的影像分析方法来准确判定马铃薯甲虫危害程度。总体上,目前基于无人机监测作物病虫害信息的研究多集中在影像光谱特征与病虫害发生程度间的关系解析方面,今后将其在实际生产中进行推广应用,还需要考虑将影像信息与气象、水资源等数据结合,针对不同地区制定不同的无人机病虫害监测飞行计划与防控应急处置方案。
1.2.5 作物田间管理
将无人机应用于作物田间管理,使其成为“空中拖拉机”,对提高生产效率、减少农事活动过程对作物生长的扰动和对操作人员的伤害具有重要意义。如前所述,目前无人机已在播种、施药、施肥等方面开展了应用研究,尤其是在喷洒药剂以防治病虫害方面。基于图像识别技术和无人机技术,在有效识别裸露地块的基础上,王林惠等[38]实现了基于无人机对水稻种植区的施药作业;陈盛德等[39]比较了农用无人机航空喷药方式和人工喷施方式在水稻植株上的施药效果,结果表明,航空喷施的雾滴沉积效果优于人工喷施,其作业效率约为人工喷施的10倍,且成本低,效益高;FAIÇAL等[40]设计了一款基于无人机的喷药系统,它能够根据地面传感器测定的环境参数,动态调整无人机飞行过程中的飞行参数来使得农药喷施更加均匀。但目前无人机在田间作业中的应用还很不完善,有许多环节需要改进,除前面提到的有关机载设备的若干改进方面外,作业方式也需要从目前的“粗放”管理向“精细”管理转变。田间病虫害的发生程度、养分亏缺程度等并不是均一的,有灾情严重的地方,也有较轻的地方。因此,需要进一步研究能根据不同的作物灾情空间发生程度进行变量施肥、施药的无人机田间管理系统,以达到对灾情的精准防治,同时,减轻过量药剂、肥料对环境和植株的伤害。
2 发展展望
总体而言,目前无人机在农业中应用要面临的问题主要有:飞行稳定性与智能化水平不高,平台个性化不足;机载传感器成本过高,难以普及应用;无人机作业下的雾滴、颗粒飘移规律需要进一步明确,施肥、施药等机载设备的作业控制技术存在较大的改进空间;作物长势监测及产量估测以经验模型为主,模型准确性、稳定性未得到广泛验证。为解决这些问题,促进无人机技术在农业中进一步应用,以下几方面的研究将是关键。
2.1 无人机的个性化与智能化
随着工业技术的发展和人们对民用无人机多方面的技术需求增多,未来无人机的研究必将向着个性化、智能化方向发展。如:开发无人机实时、精准定位技术与飞行姿态精准控制技术以增强无人机的飞行控制精度;开展无人机实时智能避让技术研究,以应对飞行过程中的突发障碍物,保护机载设备安全;发明多载荷协同观测及增稳云台以促进无人机多载荷同步观测;研发无人机各部件组件化封装技术,使用户能根据自己的资金、性能需求自主搭建无人机工作平台等。
2.2 机载传感器的低成本和轻小型化
传感器是无人机得以推广应用的基础设备之一,只有使用适合无人机的遥感传感器才能获得高质量的遥感信息[41]。从无人机的载重、续航时间及无人机遥感的普及应用方面考虑,开发通用性强、低成本、体积小和质量轻的传感器是无人机传感器发展的重要方向。另外,实现传感器波段可定制,以满足不同个体对光谱信息的个性化需求,将是未来市场发展的趋势之一。
2.3 机载农机设备的智能化
2017年国务院发布了新一代人工智能发展规划,将人工智能的发展提到了国家战略高度。智能化是新一代无人机机载农机设备的基本特征。研发高效的图像识别技术、农药和化肥精准控制技术等,实现无人机飞行参数、药剂用量等根据作业单元特征实时自动调整,能根据作物长势空间变异精准、定量地进行施肥、施药等农田管理,是实现无人机农田作业智能化的重要方向。
2.4 无人机多传感器数据融合技术
不同类型传感器的价格、技术特征及作用各异。开展基于无人机平台的多载荷协同观测及相关数据融合处理技术,对于高效反演作物长势信息、协助农业精准管理具有重要意义,将是今后基于无人机对地观测的重要发展方向。
2.5 不同监测平台数据的融合与应用
基于无人机开展作物长势监测具有机动、灵活、分辨率高、可实现面状监测等优势,但它只是信息获取的一种手段,在应用中也存在一定的局限性。同其他遥感手段一样,无人机遥感能够判定作物生长的好坏,但很难判定影响作物长势好坏的因素。要判定作物长势不好由何种原因引起,需要结合地面调查数据或传感器监测数据。因此,耦合无人机监测数据与地面传感器网络监测数据,来实现作物长势监测定量化和后期精准管理至关重要。另外,相对于卫星遥感,无人机在短时间内的监测面积有限,因此,怎样结合无人机遥感数据与卫星遥感数据实现对作物灾情的短期测报也是今后研究的重要方向。
2.6 无人机作业及数据处理分析的标准化
要实现无人机农业应用普及化,在前面提到的传感器设备及机载农机具轻小型化、智能化、低成本化的基础上,还需要构建基于无人机鲁棒性的作物参数遥感反演模型。可以根据精度要求分区域、分作物生育期构建模型,也可以构建统一模型,但必须具有高精度、可重复等特征。另外,需要根据作物类型、种植区域特征等,面向田间管理需求,制定无人机作业规程,明确监测时间、任务、数据处理流程等,形成规范。
3 小结
无人机作为一种重要的信息获取手段和田间作业方式,在农业生产中的应用具有其他机械无可替代的优势,是未来农业发展的重要辅助手段,尤其适合我国目前农业经济发展的现状。虽然目前基于无人机的作物长势监测和田间辅助作业已取得一定成果,但还存在无人机平台难以满足多样化的用户需求、机载传感器成本高、相关农机设备智能化不够、缺少高鲁棒性参数反演模型等问题。建议提高无人机个性化、智能化水平,研发低成本、轻小型化的机载传感器,实现机载农机设备智能化,开展无人机多传感器数据及无人机平台数据与其他平台数据的融合与应用,建立标准化的无人机作业制度等。
猜你喜欢
今日农业(2022年1期)2022-11-16
今日农业(2022年16期)2022-09-22
北京航空航天大学学报(2022年8期)2022-08-31
中等数学(2022年5期)2022-08-29
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年1期)2021-05-22
今日农业(2020年17期)2020-10-27
中等数学(2020年2期)2020-08-24
农村农业农民·B版(2016年7期)2016-10-21
