
基于BP神经网络的空中机器人传感控制研究
2018-09-13 05:04吴赛燕
中国电子科学研究院学报 2018年4期
杨 辉,吴赛燕
(太原工业学院电子工程系,山西 太原 030008)
0 引 言
在灾后搜索营救以及军事侦查领域中,空中机器人起着较为重大的作用。空中机器人对外界的感知是模仿人类感知外界的方法进行设计的[1],所以对于空中机器人来说,对传感器进行准确的控制能够提升空中机器人的性能,使空中机器人更好的、更智能的完成任务。已经有一些研究者对其进行了研究,如文献[2]介绍了电磁环境效应与智能武器控制的本质与关系,系统阐述了评价结果和标准。文献[3]阐述了电磁环境下的智能装备检验问题。文献[4]研究了复杂电磁环境下的航空通信控制问题。以往基于DSP的传感控制系统在复杂电磁环境中,由于噪声等干扰,使其接收的信息极为复杂,信息中包含较多的噪声因素,不能满足空中机器人对于传感控制的要求。为了解决该问题,本文设计基于反向传播(back propagation, BP)神经网络的传感控制系统,使空中机器人能够在复杂电磁环境中进行准确,快速的传感控制。
1 基于BP神经网络的复杂电磁环境中空中机器人传感控制系统
1.1 系统架构
控制系统是空中机器人的核心,空中机器人的全部活动行为都是通过控制系统的指挥而进行,通过控制系统,空中机器人能够进行飞行、对象判断、信息采集和发送等一系列工作。
本文系统以保障空中机器人基础作用为前提,考虑复杂电磁环境情形,在空中机器人体积、重量以及能耗、功耗等严谨的条件约束下[4],采用微电子机械系统(Micro Electronic Mechanical System, MEMS)技术,遵从一体化集成、动态基础上性能改良的标准设计了空中机器人控制系统,图1为控制系统架构图,可以看出本文系统由机载飞控子系统以及地面站子系统构成。
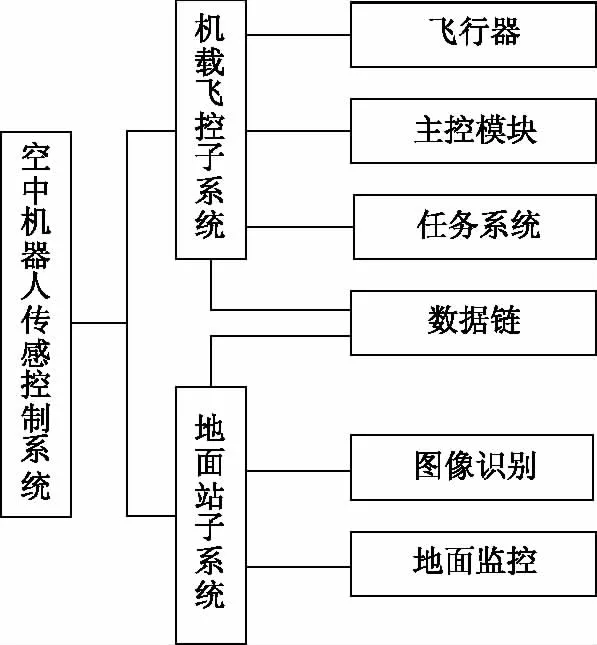
图1 系统架构图

图2 空中机器人控制系统的硬件组成图
1.2 系统硬件整体结构设计
如图2所示,系统的硬件结构包括航姿仪、高度计、GPS接收机、测距模块、主控模块以及接口等。其中,航姿仪包含角速率陀螺、加速度计、磁航向计;接口包含无线数据通信接口、舵机控制接口、有效任务载荷接口;通信接口又分为遥控接口和遥测接口。
1.2.1 超声波测距模块设计
通过超声波换能器、超声波驱动电路以及数据显示组成超声波测距模块[5]。其中,换能器驱动电路的作用为搜索、获取回波信号,图3描述的是超声波测距模块结构。
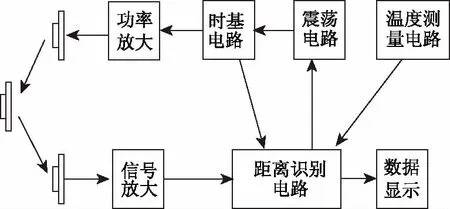
图3 超声波测距模块结构图
超声波测距模块采用TCT16K25T超声波传感器探头,由于其具有30°局限角,无法进行全方位勘察[6]。为了解决这一问题,在空中机器人正反两面设置两个超声波传感器,在其左右两侧设置十个超声波传感器。对传感器传递的信号进行获取并对其及时分析,实现障碍物大致位置以及空中机器人与障碍物之间距离的判断,对其详细过程的描述为:
(1)为空中机器人能够进行全方位勘察,在空中机器人上设置超声波传感器。
(2)对空中机器人上的超声波传感器实施编号处理,根据超声波传感器的编号,通过换能器分别记录它们发出的信号信息。
(3)对换能器获取的不同超声波信号实施整合,采用直角坐标方法确定各传感器坐标系[7],进而辨别障碍物,实现对其形状的判断。坐标转换的详细描述见图4。
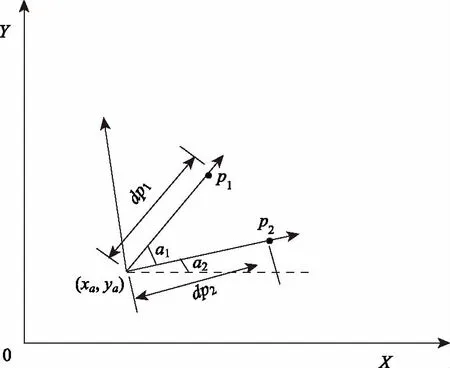
图4 传感器坐标系变化图
在图4内,设空中机器人超声波传感器个数为i,pi、dpi分别表示第i个传感器的物理测点以及勘测距离,ai为超声波传感器同区域传感器坐标系间角度。pi的区域坐标系可以通过式(1)进行描述:
(1)
对式(1)积分,获取整体坐标系中pi的方位坐标,以式(2)对其进行描述:
(2)
在实际工作过程内,空中机器人面对的障碍物有可能是连续的、多个的,超声波测距模块利用传感器传递的详细信息对空中机器人固定范围内面对的障碍物的实际个数进行计算[8],具体规则为:
(1)若空中机器人位置靠近的传感器同步传递障碍物信号,并且两个信号位置差距不大,那么将两个障碍物信号合一,表示空中机器人附近障碍物数量为1。
(2)若空中机器人位置靠近的传感器传递障碍物信号时间不一致时,表示空中机器人附近障碍物数量为2。
利用真实的工作过程内,空中机器人不同传感器在不同方位所生成的勘测信号,确定障碍物同空中机器人的详细距离。
1.2.2 主控模块设计
主控模块获取超声波测距模块传感器传递的信息后,对信息实施处理,为本文传感控制系统实施空中机器人的控制提供基础。主控模块的核心芯片采用S3C2410芯片。本文设计的空中机器人传感 控制系统的主控模块的软件分析采用神经网络算法,空中机器人进行实际工作时,主控模块获取超声波测距模块反馈的信息后,对障碍物具体信息实施整合训练,结合神经网络障碍物躲避模型,生成障碍物躲避的具体信息,实现空中机器人的避障行为。
(1)主控模块外围电路设计
主控模块采用S3C2410单片机构建控制器局部网(Controller Area Network,CAN)总线的传播通信系统,对空中机器人传感器生成的信号实施滤波处理,信号通过主控模块的单片机时,实施以网络模糊控制为基础的空中机器人多传感器信息融合,以及障碍物躲避的计算。
主控模块边缘电路的基础功能是整流及滤波[9]。如图5整流滤波电路图所示,主控模块的边缘电路的滤波电路由两个二阶的滤波器芯片组成,滤波器整体调整是由R2、R4结合中心频率来实现。设输入电压量为固定值,则直流电取代交流电,进而实现逆变器的输出功率稳定。
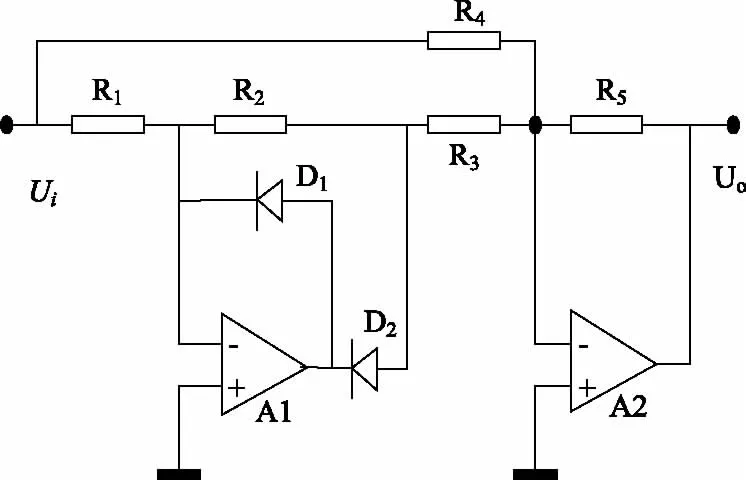
图5 电容输出整流滤波电路图
为确保空中机器人在复杂电磁环境中依然能够快速、有效的进行工作,主控模块的电路选取2000 μF/250 V电解电容,保障整流二极管的作用在复杂电磁环境中得到极限体现。
(2)基于S3C2410主控模块设计
空中机器人工作过程中,受到复杂多变电磁环境的干扰,使得以S3C2410芯片为基础的主控模块的存储空间不能对传感器获取的大量信息实现全部存储,所以,主控模块采用了S3C2410外接存储芯片,通过图6对其进行描述。
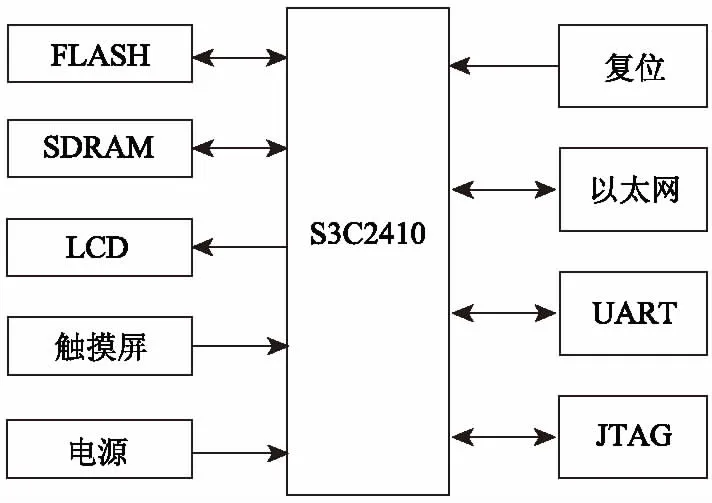
图6 主控模块设计
1.3 系统软件设计
BP神经网络算法是针对大量信息内的数据进行逻辑分析的算法,向正方向传输时,输入样本从输入层写进,通过不同的隐含层处理,向输出层进行传输,每一层神经元的状态仅与下一层神经元的状态相关。若在输出层得不到期望的输出,则转入误差的反向传播阶段,把这种误差以采用某一形方式向输入层反馈,同时把这种误差均分给每层,进而得到每层单元的误差信息,并以此来修正每个单元权值。所以,在本文系统中主控模块内加入神经网络,利用BP神经网络算法构建主控模块同传感器两者的映射关系,对空中机器人障碍物躲避的性能由较大程度的提升[10]。
对神经网络进行整合就是分别对神经网络权重以及神经网络拓扑结构进行整合[11],其中,对神经网络权重实施整合是最重要的。BP算法为能够监督的训练方法,采用BP算法对神经网络进行训练,通过误差反向传播方法降低网络权值[12]。权值能够对输出层的误差形成作用,按照输出层的误差对权值矩阵进行修改,能够减少输出层误差。
举例说明:在3层网络内,隐含层数量为1,W(ij)、W(jk)分别表示输分别表示输入层同隐含层的权矩阵以及隐含层同输出层的权矩阵。net(x)、o(x)、w(xy)、θ(j)、θ(k)、y(t)分别表示节点x的输入、节点x的输出、节点x同节点y的连接权、隐含层阈值、输出层阈值以及期望输出。i、ai、j、k分别表示输入层节点、样本输入、隐含层节点及输出层节点,分别通过1≤i≤n、1≤ai≤n、1≤j≤m及1≤k≤l对它们进行约束。
采用BP算法对神经网络进行训练包括:
(1)正向传播。对输入信息进行确定,在输入层和隐含层内分别对输入信息的真实输出值进行运算,即以输入层为始端,将输入信息经隐含层传输入输出层。
输入层neti=ai
(3)
oi=neti
(4)

(2)反向过程。在输出层获取的实际输出值不是期望的输出值,那么按照正向传播的过程原路返回,并对实际输出值同期望输出值的误差进行运算,基于误差结果对权值及偏置进行修改。
对误差的描述为:
式(9)内,N、ok、yk分别表示样本个数、节点输出及期望输出,修改权值及偏置是为了降低误差。
本文传感控制系统输入向量采用空中机器人传感器获取的5组样本数据,分别为:i1、i2、i3、i4、i5,即:
Si={i1,i2,i3,i4,i5}
(10)
式(10)内,Si表示总输入量。
获取样本数据后,需要对隐藏层神经元数进行确定:合理的隐藏层神经元数能够在提升障碍物判断速度的同时使障碍物判断的准确率升高[13]。一般情况下,神经元并不单独存在,根据式(11)能对神经元的个数进行确定:
(11)
式(11)中,m、n分别表示输入层和输出层的单元量。
本文系统中的主控模块在保障空中机器人能够正确判断障碍物的前提下,通过神经元数量的增加能够提升误差减少的效率。
对系统主控模块采用BP神经网络算法进行空中机器人障碍物判断,其具体过程如下:
(1)对BP神经网络的权值及偏值实施初始化;
(2)若空中机器人障碍物判断结果不满足结束条件时,保持判断;若空中机器人障碍物判断结果满足结束条件时,结束判断,直接进入(6);
(3)针对各隐含层及输出单元j的输入传感器Ij以及输出信息Oj实施运算;
(4)分别对输出层各单元j及各隐含层单元j的误差进行运算;
(5)对权值及偏值实施改进,进入(2);
(6)对神经网络实施训练。
2 实验分析
实验为了测试本文系统的性能,以某型号空中机器人为实验对象,采用本文系统在电子信息系统复杂电磁环境效应国家重点实验室中进行实验控制机器人障碍物躲避实验[14],实验具体情况如图7所示。其中S表示空中机器人,Z表示障碍物。
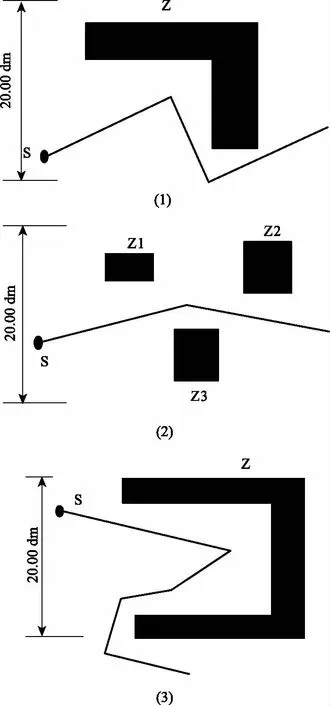
图7 空中机器人障碍物躲避实验结果
从图7的3个空中机器人障碍躲避实验中能够看出,本文系统控制下的空中机器人在不同环境下均能有效实现障碍物躲避,表明本文系统能够实现复杂电磁环境中空中机器人的控制。
实验为了验证本文系统的超声波测距模块的性能进行测试。在复杂电磁环境中,通过空中机器人的超声波测距模块进行距离测量实验,将超声波测距模块得到的结果与实际距离相比较,结果如图8所示。
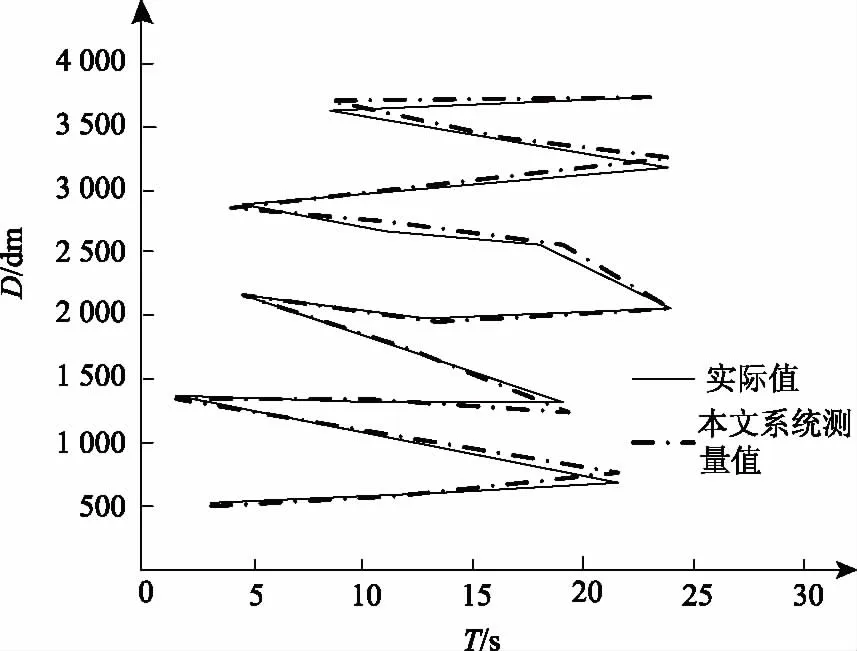
图8 超声波距离测量模块的测试结果
对图8的分析能够得到,当距离在500~1000 dm之间时,前十秒的实际值与本文测量值完全重合,15~20 s时,系统测量值与实际值出现微小偏差,计算出系统超声波测距模块得到距离结果与实际距离有40%左右是重叠的,其余60%左右的偏差也较小。实验结果表明,本文系统的超声波测距模块能够实现空中机器人远距离的距离测试,可以提升空中机器人的障碍物躲避性能。
实验为验证本文系统的准确性,采用包括本文系统、基于DSP的空中机器人控制系统以及基于CAN总线的空中机器人控制系统在内的三个系统,在电子信息系统复杂电磁环境效应国家重点实验室中,进行复杂电磁环境下空中机器人飞行控制误差实验,获取结果用表1描述。
对表1进行分析可得,与其他两个系统相比较,本文系统控制下的空中机器人在复杂电磁环境中飞行的平均误差更小,证明本文系统可以实现复杂电磁环境中空中机器人飞行的准确控制。
实验为验证本文系统的传输效率,分别对实验室中本文系统、基于DSP的空中机器人控制系统以及基于CAN总线的空中机器人控制系统,控制下的空中机器人的平均传输速率进行对比[15],对比结果如表2所示。
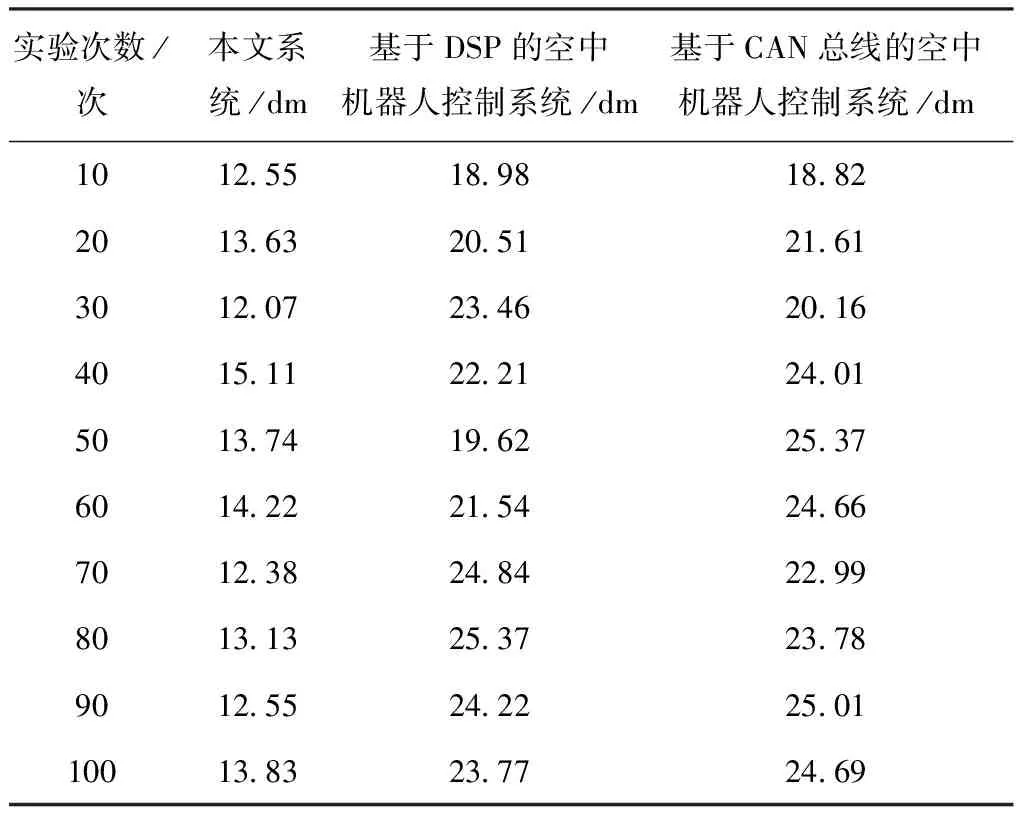
表1 不同系统控制下的空中机器人飞行误差对比
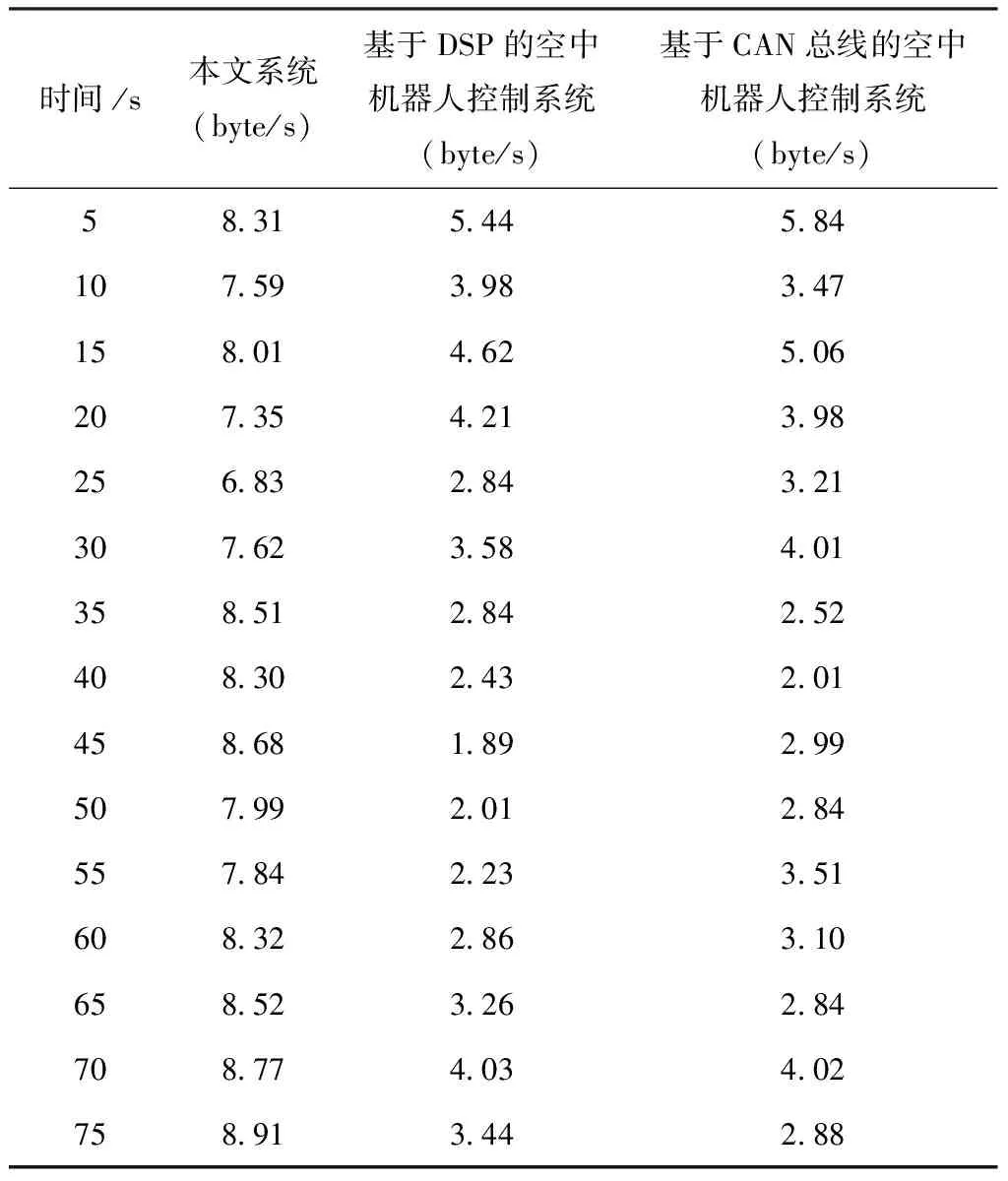
表2 不同电磁环境下空中机器人的平均传输速度对比(byte/s)
分析表2可知,在复杂电磁环境中,相较于其他两个空中机器人控制系统,本文系统控制下空中机器人的平均传输速率较高,并且变化较平稳。实验结果说明,在复杂电磁环境中,本文系统能够实现对空中机器人的有效传感控制,使其拥有较高的数据传输效率。
实验为测试复杂电磁环境中本文系统控制下空中机器人飞行的稳定性,在实验室中对三个系统的传感器平均中断概率进行比较,结果通过图9进行描述。
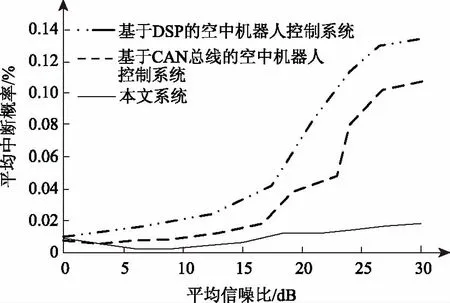
图9 复杂电磁环境中不同系统控制下传感器平均中断概率
分析图9能够得到,当传感器的平均信噪比为超过18 dB时,本文系统传感器的平均中断概率同其他两个系统传感器的平均中断概率相差较小;当传感器平均信噪比超过18 dB时,三个系统传感器的中断概率全部随着平均信噪比的增长而增长,其中本文系统传感器的平均中断概率增长曲线最为平缓,远远小于其他系统传感器的平均中断概率,表明本文系统在复杂电磁环境中的稳定性较好。
3 结 语
为了解决传统空中机器人在传感控制上受电磁干扰的局限性,本文设计基于BP神经网络的复杂电磁环境中空中机器人传感控制系统,能够实现空中机器人在复杂电磁环境中的传感控制,并且具有精度高、传输速度快、稳定性好等优点,为提高复杂电磁环境中空中机器人的传感控制提供基础,具有较高的应用价值。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2018年23期)2018-12-26
电子制作(2017年7期)2017-06-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
