
2015年别克昂科威巡航无法使用
2018-09-13 06:54:00上海安吉孙爱林钱梁
汽车维修技师 2018年4期
上海安吉/孙爱林 钱梁
VIN:LSGXE83L4GD2××××××。
行驶里程:90701KM
故障现象:客户反映巡航无法使用,仪表信息中心显示“维修驾驶辅助系统”,如图1所示。

┃ 图1 仪表显示
故障诊断:根据客户所述,在检查确认蓄电池电压正常的情况下试车,故障现象存在,客户反映属实。
仪表信息显示中心显示需维修驾驶辅助系统(注:如果主动安全模块使用作为输入的模块内设置DTC,则主动安全模块将发送维修驾驶辅助信息至组合仪表)。技师经厂外试车,确认巡航无法使用。同时根据维修信息查询提示,需更换主动安全模块,并在线进行软件刷新。因此技师先更换了主动安全模块(如图2所示),随后做了在线软件刷新,刷新后试车,故障仍未排除。
连接诊断仪,读取故障码显示为U0159、 B1325,如图 3 所示。
进一步读取数值,远程雷达传感器模块未对齐(偏向上),说明有故障存在,如图4所示。
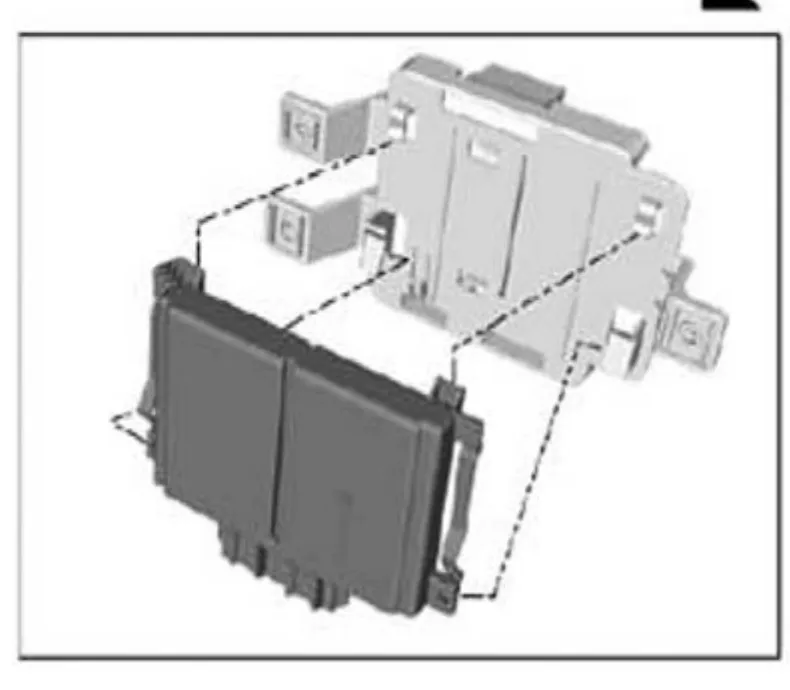
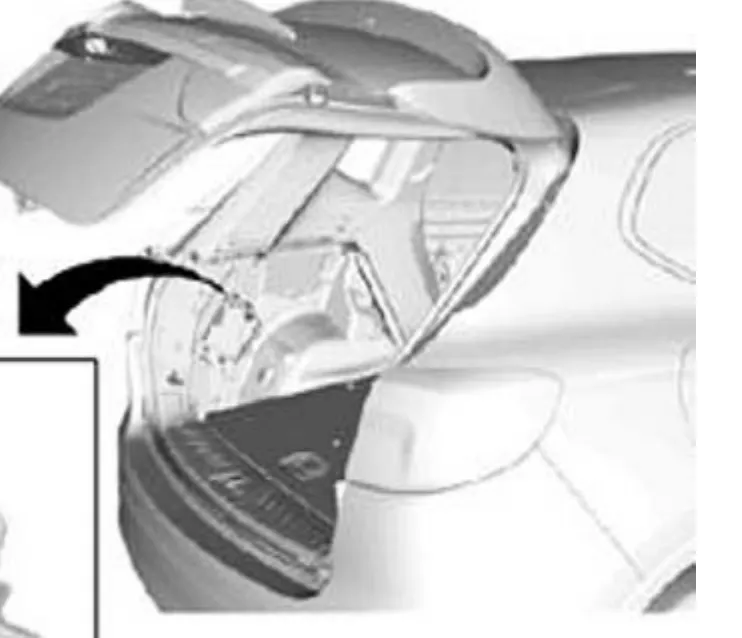
┃ 图2 主动安全模块位置
简述一下全程自适应巡航控制原理:
昂科威在自适应巡航行驶中,全程使用前视摄像头和长距雷达进行探测。如果探测到前方车辆,自适应巡航可能会施加加速或制动,以保持跟车间距,系统可以在跟随车辆之后进行自动减速直到停车。

┃ 图3 故障码

┃ 图4 数据流

┃ 图5 数据读入
在距离达到设定的范围时,前仪表台会“哔哔”鸣叫和闪烁,主驾座椅发出震动现象(使用方法可在车辆的个性说明里查看)。
根据维修手册查询,结合相关通信及数据显示,技师认为前长距雷达可能存在水平误差或相应模块、线路存在问题。认为主要还是水平调节不对,造成故障的可能性偏大。造成此故障的原因,可能是在之前拆装过模块或支架时导致雷达模块内部天线上仰或下倾超出要求的±3°,从而对前方目标车辆的探测产生偏差,影响自适应巡航功能的正常运行。
随后技师按程序测试数据,结果与数据显示数值一致(长距雷达模块偏向上),与正常数据有偏差。于是拆下前保险杠,对前长距雷达模块进行调节,并用水平测试仪检测,直到调整到水平数值正常后再装复前保险杠试车。
前长距雷达模块对准程序如下:
注意:数字量角器的精度必须为±0.5°,前方雷达模块的垂直位置为90°(±3°) 。
校准程序:
1.清除相应不存在的其他DTC;
2.驾驶车辆前确保雷达前部表面清洁;
3.准备故障诊断仪以适应远程雷达校准,在校准期间,需保持连接;
4.发动机运行;
5.使用诊断仪开始校准;
6.以高于56km/h的速度驾驶,最小化弯路,避免突然加速与减速,跟随一个车辆(跟随期间车距为30~50m最佳),在路旁有固定物体的环境中行驶;
7.正常行驶10~30min后观察确认是否校准正确。
技师按照标准校准程序成功校正,然后进行外出路试校准,直至仪表对话框显示绿色小车图案(如图5所示),故障排除。
故障总结:此案例的故障症状是由于前长距雷达模块水平调节不正确,从而导致主动安全系统都无法正常使用,如巡航无法使用,跟车距不报警与座椅无法产生震动及仪表信息中心显示维修驾驶辅助系统等。
针对此类新技术的维修与排查,在判断与分析上一定会有其设计上的独到之处。故障表现与检测手段的运用,乃至维修中的校准标准和规定程序,需维修技师善于学习,善于结合原理去分析,掌握要领并运用到实际当中去。
猜你喜欢
建筑与预算(2023年2期)2023-03-10 13:13:36
建筑与预算(2022年5期)2022-06-09 00:55:10
建筑与预算(2022年2期)2022-03-08 08:40:56
汽车维修与保养(2021年12期)2021-03-08 09:34:02
汽车维修与保养(2020年10期)2021-01-22 06:36:54
汽车维修与保养(2020年4期)2020-07-18 02:33:32
红领巾·探索(2020年2期)2020-05-19 15:25:41
铁路通信信号工程技术(2019年6期)2019-01-17 18:56:14
经营者·汽车商业评论(2016年12期)2017-03-08 02:31:39
太空探索(2016年9期)2016-07-12 09:59:51
