基于低空无人机遥感测绘的矿上测量研究
2018-09-11 11:42王炳坤
中国锰业 2018年4期
王炳坤
(西安航空职业技术学院,陕西 西安 710089)
1 概 述
无人机(Unmanned Airborne Vehicles,UAV)已经在军事、商业以及反恐任务中得到了广泛的应用,这是由于其价格低廉,并可以搭载多种传感器—从简单的摄像机到红外摄像机到磁力计等,以致于可以从稳定的平台收集高质量的数据。在最初由军事应用推动的过程中,无人机的平台在过去十年中随着新技术的改进,工作效率、探测范围、机体尺寸和有效载荷发生了显著变化。虽然这些发展已经超出了商业领域,但随着越来越多的应用需求,无人机已经得到了更为实质的应用,其中矿产勘查即为主要用于之一。这是因为矿产资源所处的地理位置较为偏僻,无人机成为了矿产勘探的天然选择,基于无人机更易启动、飞行、管理和燃料补充;此外,无人机可以在任何天气和夜间飞行—这与传统的空中测量(人工驾驶)相比,在安全性和工作效率上得到了显著的提升。无人机对于矿产资源的探测主要按照既定的航路规划协同各类型传感器完成任务[1-5]。
无人机的工作具备如下优势:
1)在计算机控制下,UAV可以在危险的天气条件下执行任务,在精确的飞行路线上飞行,并且工作周期可持续30 h以上。
2)由于无人驾驶飞机可以沿着精确的飞行路线行驶,因此它们可以相互靠近飞行,在既定的任务中相比人驾飞机需更少的时间。
3)使用若干UAV进行协同工作的优势在于,在其任何系统中发生故障的UAV可以由备用UAV取代,以确保分配的任务始终按时完成;几个UAV还可以测量调查中同一位置的数据,通过消除任何仪器漂移或错误来提供高质量的数据。
4)UAV可以在低空安全飞行,实现高分辨率的航空磁测图。
5)以网络为中心的方法,其中来自每个UAV的数据实时更新服务器计算机,允许用户通过Internet查看最新信息。
6)UAV更环保:小巧,耗油少,二氧化碳少,噪音小:UAV燃油16 g/km,而Cessna Skylane(一种测绘飞机)152 g/km。
2 系统搭载设计
由于无人机不受人类飞行员生理限制的负担,因此可以设计最大化的在站时间。无人机的最大飞行时间差异很大,内燃机飞机的耐力取决于燃烧的燃料占总重量的一小部分,因此很大程度上与飞机尺寸无关。太阳能电动无人机拥有无限制飞行的潜力,这在Helios Prototype所倡导的一个概念,但它在2003年的飞机失事中被证明无效[6-9]。
ATOM是无人机导航的综合IMU-AHRS-INS设备。它可以将10Hz GPS模块转换为100Hz全球导航卫星系统/惯性导航系统(GNSS/INS)模块;利用ATOM提供的传感器系统,通过降低GPS频率可以实现更好的探测性能,可以降低成本和系统的整体功耗;当用ATOM增强时,GPS模块的GNSS消息语法可以得到遵守,所以无人机导航的传感器系统的插入是透明的。使用ATOM的传感器融合算法实现的功能如下:
1)实现无间隙的、永久的准确定位;
2)提供非常准确、低延迟的传输和速度信息;
3)导航速率等效为200 Hz,通过低功耗无人机导航的高级算法和硬件提供惯性导航输入,以便系统持续以“航位推算”模式工作。虽然这种惯性导航的使用不如GPS精确,但它为车载GPS,Navibox和室内导航等应用带来了所需的实验结果。
采用ATOM算法的定位结果如图1所示[1]。其中左侧标注“载人飞行器”区域为人工驾驶飞机的探测范围值,实验图可见无人机相比人工驾驶飞机在探测范围、探测时间上有较大的优势。
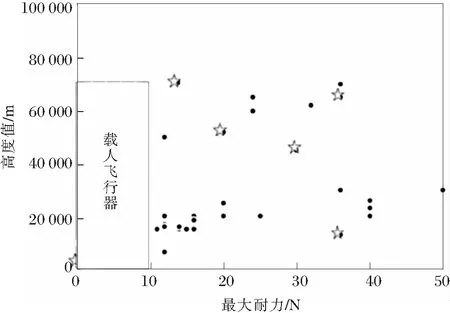
图1 无人机与有人驾驶飞行器探测性能对比
系统采用量子通信作为无人机与地面基站交互的方式,结合遥感技术实现近实时的探测信息获取,为研究人员提供了准确的图像信息,采用如下模型作为信息交互模型:
xm(t)=Amxm(t)+Bmu(t)
(1)
ym(t)=Cmxm(t)
(2)
其中,xm(t)是状态向量,ym(t)是输出向量,u(t)是控制输入向量;Am,Bm,Cm分别是系统状态矩阵,输入矩阵和输出矩阵。在量子计算中,0和1表示微粒的两种基本状态,称为量子比特;任意单量子比特状态可以表示为两个基本状态的线性组合;量子位的状态不仅是0和1,而且也是状态的线性组合,通常称为叠加状态。
无人机的飞行控制系统可分为纵向通道控制和横向通道控制。控制面分别是升降舵,副翼和方向舵。在正常情况下,由于纵向和横向通道之间的强耦合,控制律设计变得非常复杂,因此纵向和横向通道控制必须实现去耦。然后,可以分别为无人机飞行控制系统设计纵向和横向控制,在该研究中,综合控制规律是针对无人机飞行控制系统的纵向和横向信道,采用量子控制技术的量子比特状态。量子控制模块展示了3个量子比特的状态描述和控制,表1给出了无人机量子控制模块的3个量子比特概率幅度的具体描述。
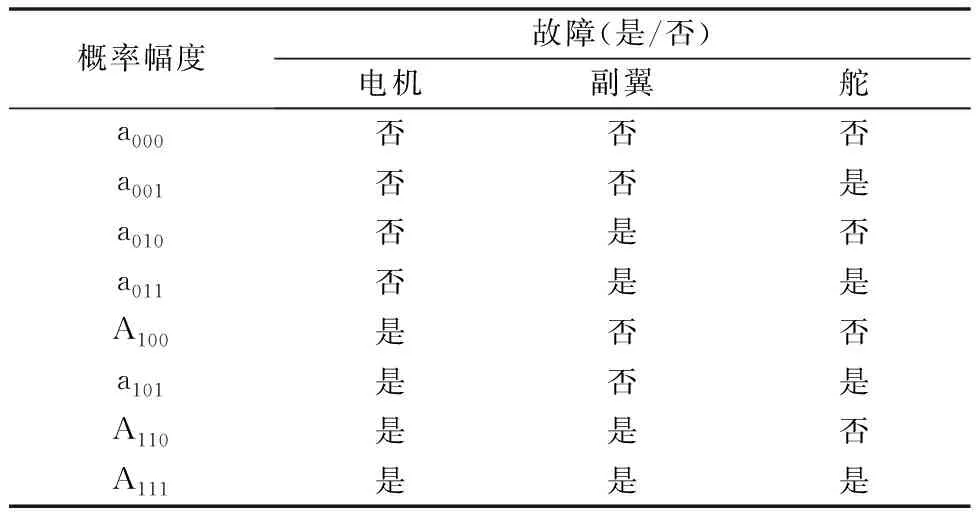
表1 量子控制模块的概率幅度
3 实验设计
UAV由于飞行高度较低,可以获取亚分辨率空间分辨率的高光谱图像数据。如图2所示为具有量子通信系统的无人机外观图。
该试验于2017年9月9日在XX机场进行,研究区面积为30 km×11.25 km,位于机场东侧,该地区海拔约37米。土地覆盖由居民区,水体,森林和农田组成。飞行时间为12点44分至14点35分通过量子通信系统收集所测区域数据,在主要晴空条件下形成8条航线,如图3所示,其中FL1-FL8分别表示8条航线,并形成不同区域的航空影像数据。

图2 无人机

图3 航线设置
实验处理过程如下:原始航空影像数据的预处理步骤包括高光谱图像的图像去噪和时间转换,POS数据的坐标变换和时间匹配;然后,使用多项式方法对各条飞行线进行几何校正,其中每个像素根据选定的GCP校准至具有较低的均方根误差值;最后,执行最近邻重采样,因为它不会改变像素值。图4是几何校正结果的例子。如图4从左到右可以看到,量子遥测很好地描绘了这些特征的细节,并且它的位置精度和空间信息得到了改善。但是,随着飞机的振动,内部图像的几何形状发生了变化,为了解决这个问题,将在今后的工作中开发将飞行期间记录的外部方向数据与内部方向和高程模型相结合的方法。
4 结 语
无人机(UAV)的耐久性能够在相当高的时间范围内运行,为遥感数据采集提供了更高的效率和时间节省。UAV可以在各种温度和压力环境下有效飞行,此外,超长持久的飞行周期为无人机在高空的高效运转提供了可能性。本文采用ATOM定位算法结合量子通信系统设计实现了应用于矿藏测绘用的无人机载遥测系统,采用量子技术的原因是考虑数据通信的安全性以及实时性,通过设计实验验证了该系统在遥测地质影像过程中有较好的效果。
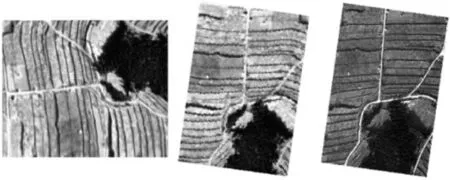
图4 量子遥测结果对比
猜你喜欢
环球时报(2022-05-30)2022-05-30
量子电子学报(2022年2期)2022-04-16
量子电子学报(2022年1期)2022-02-25
小学科学(学生版)(2020年1期)2020-01-19
当代陕西(2019年11期)2019-06-24
科学大众(中学)(2019年2期)2019-04-08
海峡姐妹(2017年10期)2017-12-19
三联生活周刊(2017年33期)2017-08-11
作文周刊·小学一年级版(2017年9期)2017-06-20
银行家(2017年1期)2017-02-15