
哈尔滨地铁1号线ATO驾驶模式下列车停车精度问题
2018-09-11 01:32牟涛
铁路通信信号工程技术 2018年8期
牟 涛
(哈尔滨地铁集团有限公司,哈尔滨 150050)
哈尔滨地铁是中国首个高寒地铁系统。作为全国首个高寒地铁线路,哈尔滨地铁已经正式开通了两条线路其中1号线一、二期工程,线路全长17.451 km,共设18座地下站,设有5个联锁区,有岔站9座,无岔站9座,共17列电客车。于2012年9月26日正式运营运行至今信号系统整体运行平稳,但也出现了一些停车精度问题(冲标、欠标),本文针对此类问题进行分析与探讨,找到列车停车精度不准的问题所在。
1 ATO模式对标原理
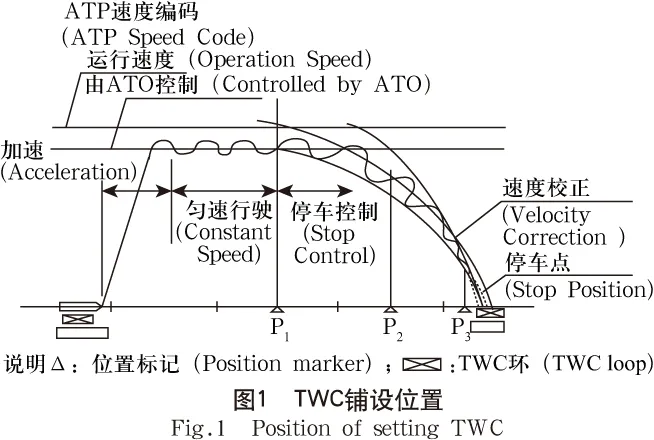
ATO模式下京三信号系统精确停车(简称为TASC,停车精度要求:99.995%的情况下,误差不超过300 mm;99.9998%的情况下,误差不超过500 mm。)是由地面有源、无源应答器(简称TWC,铺设3个TWC分别为P1、P2、P3)与车载TWC天线、车载ATC系统结合完成的,如图1所示。
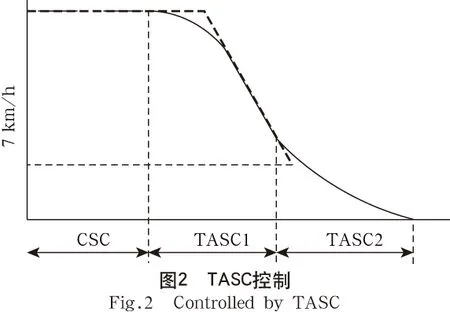
TASC控制分为两个阶段TASC1和TASC2,在这两个区间来进行控制。列车走行至P1开始执行TASC1,TASC1是靠减速度进行直线减速的去建立,换级触点根据预测目标速度和预测ATO速度的偏差来计算出当前列车输出的牵引力。列车走行至至P2开始执行TASC2,TASC2是到停车位置为止的剩余距离和“从现在速度来计算指令制动力的强度”的区间,如图2所示。
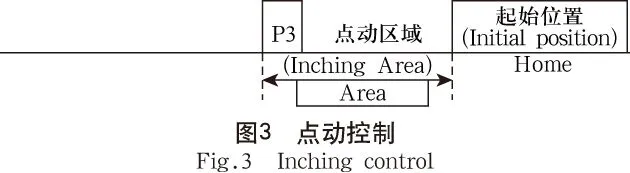
当列车走行至P3与目标停车点之间时,点动控制开始(P3-起始位置),点动目标速度基于ATP信号或剩余距离及ATO信号设置。当剩余距离为5 m或更大时,目标速度设置为5 km/h。当剩余距离为大于2 m且小于5 m时,目标速度设置为3 km/h, 当剩余距离小于2 m时,目标速度设置为1 km/h。如果允许的ATP速度更低,设置更低的速度。如果列车在TWC环路中心+300 mm前,使用TASC2中的线性降速。如果列车超过TWC环路中心+300 mm,输出ATO状态下的最大制动,如图3所示。
2 影响停车精度的因素
列车进站停车阶段,主要影响列车停车精度的主要因素有以下几方面:1)车辆侧制动系统是否良好;2)信号侧车载系统控制精确性;3)网压是否稳定;4)线路条件是否良好。本文主要关注的为前两点。
2.1 车辆侧制动系统
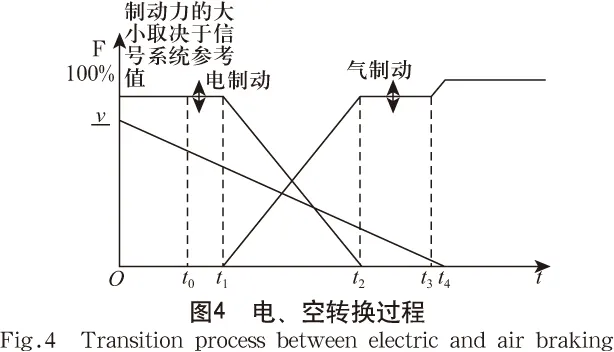
车载信号ATC系统根据列车时间运行速度和实际加速度实时调整推荐速度和牵引、制动模拟量的大小。在1号线一、二期工程里多次发现影响制动系统跟随性的关键因素多为电、空制动转换的过程中发生的停车精度不准的问题。由于电制动调节效果较好,空气制动调节性较差,可能会发生电、空转换过程中出现气制动介入过早或过晚,从而影响了停车精度,如图4所示。
2.2 信号侧车载系统控制精确性
哈尔滨地铁1号线一、二期工程采用轨道电路传输报文信息的形式,实现点联式控车。列车在ATO模式下运行过程中信号侧承担控车的主要责任,因此控制精度成为影响停车精度的关键因素。
1)车载测速电机PG的准确性
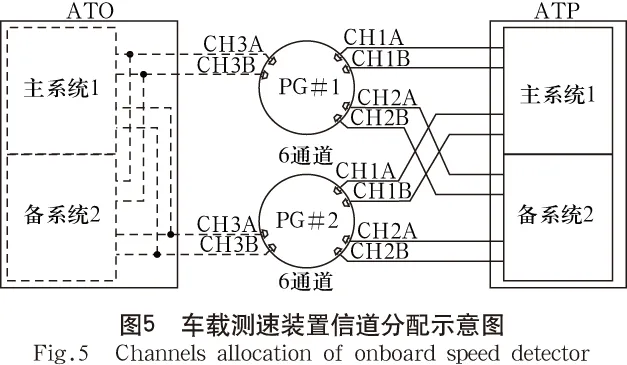
列车通过速度发电机(速度传感器)获得当前速度,PG与车载系统连接的原理示意图如图5所示。ATP/ATO系统分别从两个速度发电机获得列车当前速度,每个速度发电机都有两个速度传感器,两个速度发电机将分别安装在不同转向架的轮轴上。两个速度发电机将采用相位差90°的脉冲输入,通过对相位差的检查能够确定列车的运行方向,另外,通过对两个速度发电机的输入处理能够用于列车空转/打滑的判定。因此测速的准确性在精确停车中起到关键作用,如图5所示。
2)列车位置定位的准确性
列车运行过程中通过轨道电路边界时(机械、电器绝缘),会对列车位置进行矫正。不仅如此列车车载TWC天线与地面TWC应答器通信时也会更正列车位置信息,如果上述功能在列车位置矫正过程中发生错误,就会影响到列车停车精度。
3)车载ATO系统软件计算精度
在测速精度和位置准确行都满足要求的情况下。如果ATO系统软件算法不当,同样会导致速度曲线不够准确,从而出现频繁切换制动牵引模拟量的情况发生,影响到列车停车精度。
3 故障案例分析
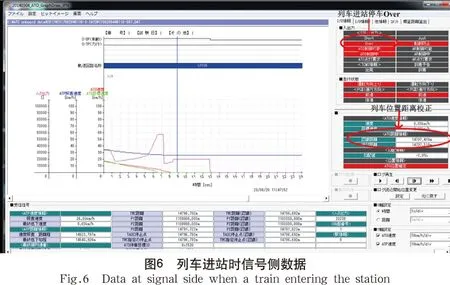
现选取哈尔滨地铁1号线一、二期工程中停车精度不准确中的一次案例进行分析,具体案例如下:0116车1端电客车以ATO模式运行至交通上行时发生冲标。信号侧数据截图如图6、7、8所示。
1)从数据截图中可以发现,列车实际速度在进站前贴合推荐速度,说明信号侧ATO控车过程中输出的牵引、制动模拟量较为准确,制动系统响应性能较好。列车进站过程中列车经过应答器后更新距离,列车位置信息无异常。列车点动停车时制动模拟量输出正常但出现冲标现象,如图6所示。
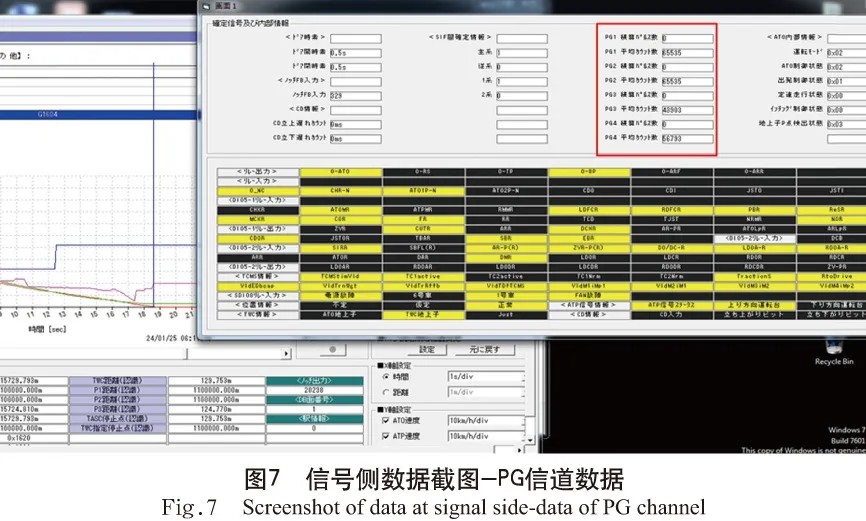
2)车载测速电机PG传输通道中6条信道未出现干扰波动问题,如图7所示。
3)为进一步分析故障发生原因调取车辆侧同一时间点同一列车的数据进行分析,数据分析结果发现列车进行点动停车时列车速度低于7 km/h时,空气制动介入,电制动不断衰减。根据空气制动的补偿要求,空气制动应立刻补充因电制动作用力减小而导致的制动力减小的情况。而实际情况为空气制动实际输出值与理论计算的值有延迟,空气制动产生的效果比预期要小,导致空气制动力的补偿相对来说比较缓慢,未达到快速补偿的目的,从而整车的制动力减小,制动距离增加。图中标注的内容显示为发生冲标时从空气制动施加到空气制动生效的过程,可以看出空气制动从施加到生效的过程与电制动之间存在延时现象。制动系统从接收到指令到空气制动建立,至少需要400 ms的时长,因此为了电、空转换的过程中保证总之动力不变,通常需要考虑到电制动力延时撤销,这样才能保证列车停车精度,如图8所示。
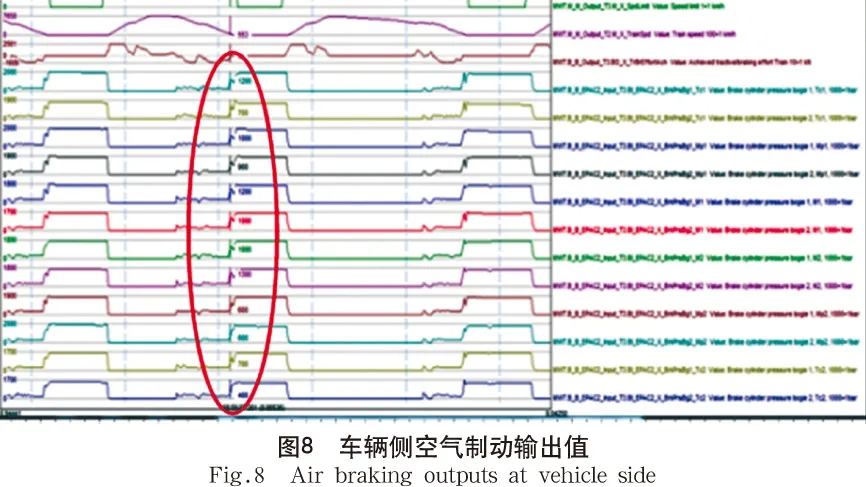
总结以上所述,在电、空转换的过程中,空气制动提前介入,如果电制动退出过早或者过晚,整列电客车的制动里都会受到影响,从而影响列车停车精度。
4 结束语
为从根本上解决车辆侧制动响应延时的问题,可以从两方面寻找办法,一是考虑增加电制动延时退出的功能,从而弥补空气制动延迟施加所带来的整车制动力降低的问题,二是优化空气制动施加条件,提高预设空气制动介入的速度(10 km/h左右),这样一来空气制动就会施加预压力,制动风缸会提前动作,缩短了空气制动建立的时间。以上两种方法在一定程度上可以解决列车停车精度的问题。
纵观全国各家地铁,列车停车不准的问题一直是困扰信号侧与车辆侧接口的疑难问题,只有两个专业通力协作才能顺利解决此类问题,确保列车停车精度的质量。
猜你喜欢
疯狂英语·初中天地(2022年2期)2022-07-07
汽车实用技术(2022年10期)2022-06-09
现代城市轨道交通(2020年1期)2020-02-14
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
伙伴(2019年3期)2019-06-11
劳动保护(2019年3期)2019-05-16
东方艺术·国画(2016年3期)2017-02-08
中国公共安全(2017年11期)2017-02-06
