
基于SolidWorks的机械式工业机器人末端执行装置的设计与实现
2018-09-10 07:48朱宏兴王柏森李远航范素香
河南科技 2018年14期
关键词:三维设计
朱宏兴 王柏森 李远航 范素香

摘 要:为解决现有技术中工业机器人末端执行装置结构复杂、生产成本高且通用性较弱等问题,本文设计了一种新型的机械式工业机器人末端执行装置。该装置能满足工业机器人在单自由度移动下对工作对象抓取移动的要求,操作简单、成本低、通用性强、适应工业生产的不同需求和多种工况下的作业。
关键词:末端执行装置;SolidWorks;三维设计;实体制作
中图分类号:TP241;TH164 文献标识码:A 文章编号:1003-5168(2018)14-0030-03
Design and Implementation of the Terminal End-effector of
Mechanical Industrial Robot Based on SolidWorks
ZHU Hongxing WANG Baisen LI Yuanhang FAN Suxiang
(North China University of Water Resources and Electric Power,Zhengzhou Henan 450000)
Abstract: In order to solve the problems of complex structure, high cost, high maintenance cost and weak generality of the terminal execution device of industrial robot in the existing technology, a new type of mechanical industrial robot terminal execution device was designed in this paper. It could meet the industrial robot in the single degree of freedom of the work of the object to move the request. It was easy to control, simple to operate, low in cost, strong in versatility and widely used, and could adapt to the different needs of industrial production and the operation under a variety of working conditions.
Keywords: end-effector;SolidWorks;three-dimensional design;entity production
工业机器人末端执行装置安装于机器人手臂末端,直接作用于工作对象。作为机器人与工作对象相互作用的最后环节与执行部件,其性能优劣在很大程度上决定了整个机器人的工作性能[1]。目前,机器人末端执行装置的抓取系统包含机械手、机器人附件和移动抓取系统,夹持装置由刀柄、模块化夹持系统、磁力夹持技术和液压技术等组成。无论是机械手还是其他末端执行装置,大多是由复杂的零件组成,在生产过程中无一不依靠电气、液压和压缩空气等才能实现,这样的末端执行装置结构复杂,生产成本高,维修保养费用高。在机器人技术飞速发展的今天,机器人末端执行系统的改进研究成为机器人研究的一个重要方向。
本文旨在设计一种结构简单、操作方便、成本低且用途广泛的新型末端执行器,以满足工业机器人对工作对象抓取移动的要求。
1 整体结构设计及工作原理
本文设计的机械人末端执行装置主要由执行器固定端、滑爪套、中轴导轨套筒、空心推杆和固定连接法兰盘等零件构成,具体如图1所示。
工作时,通过臂端的按压和弹簧的压缩使空心推杆导向块在中轴导轨套筒的凹槽内相对滑动;空心推杆外面设置的导向块沿中轴导轨套筒内的导向槽做直线滑动的插接配合;滑爪套表面的凸条与中轴导轨套筒内凸条斜向配合,使滑爪套的下部可转动地卡扣在中轴导轨套筒上;滑爪套上的卡爪与固定端内的卡块旋转卡死,固定端内弹簧给滑爪套一个反向作用力,使得固定端与滑爪套锁紧不断开[2]。
2 主要零件的三维建模
2.1 滑爪套的三维建模
给定设计参数,绘制滑爪套整体草图,在SolidWorks中编辑草图,约束尺寸關系,旋转凸台,生成滑爪套轮廓实体;在草图基准面上编辑草图,绘制滑爪套转位齿柱草图,通过凸台-拉伸生成一个滑爪套转位齿柱实体,再通过阵列生成三个所需滑爪套转位齿柱;新建一基准面与其中一转位齿柱外表面相切,在此基准面上编辑滑爪套卡爪草图,通过包覆生成滑爪套卡爪实体;在轮廓实体顶部绘制草图进行切除-拉伸,生成顶部的凸台实体;最后在轮廓实体底部生成螺纹孔,完成滑爪套三维模型[3]。滑爪套三维建模如图2所示。
2.2 空心推杆的三维建模
给定设计参数,在SolidWorks中编辑草图,绘制一个同心圆,约束尺寸关系,通过凸台-拉伸,生成空心推杆基本轮廓;在草图基准面上编辑一个三角形草图,约束其尺寸关系,通过切除-拉伸和阵列生成头部锯齿形实体;在基准面绘制空心推杆导向块草图,通过凸台-拉伸和阵列,成产空心推杆导向块实体,完成空心推杆三维模型。空心推杆三维建模如图3所示。
2.3 中轴导轨套筒的三维建模
给定设计参数,绘制中轴导轨套筒整体草图,约束尺寸关系,旋转凸台,生成中轴导轨套筒轮廓实体;在顶部绘制一矩形草图,通过切除-拉伸生成套筒内导轨实体;在基准面编辑三角形草图,约束尺寸关系,通过两次切除-拉伸和阵列生成套筒内导轨顶部锯齿形实体,完成中轴导轨套筒三维模型。中轴导轨套筒三维建模如图4所示。
3 机械式末端执行装置的虚拟装配
SolidWoks提供了基于装配关系和运动特征的装配体设计功能,支持多重子装配体。利用特征树对装配体中的零件进行修改,能清楚地区分欠约束、全约束和过约束[4]。零件图、装配图和工程图共享关联性约束,任一图形中所作的修改会自动反映到其他两个图形上。
首先,新建一个装配文档,用【插入零部件】插入零件“滑爪套”,第一个插入零件为固定装配;继续【插入零部件】“空心推杆”,选取配合按钮,选取滑爪套杆外表面与空心推杆内表面为“同轴心”。继续【插入零部件】中“轴导轨套筒”,选取空心推杆外表面与中轴导轨套筒内表面为“同轴心”配合,选取套筒内导轨表面与空心推杆导向块表面为“平行”配合。继续【插入零部件】“弹簧”与“空心推杆”“同轴心”配合,【插入零部件】“固定连接法兰盘”与“空心推杆”“同轴心”配合,其底面与空心推杆顶面“重合”配合。继续【插入零部件】“圆头螺钉”与“空心推杆”“同轴心”配合,【插入零部件】“臂端连接帽”与“空心推杆”“同轴心”配合,底面与“固定连接法兰盘”顶面“重合”配合,此零件配合需特别注意“臂端连接帽”与“固定连接法兰盘”上的螺栓孔“同轴心”。最后【插入零部件】“固定端”与“滑爪套”同轴心,“固定端”内“弹簧”与“固定端”“同轴心”且“重合”[5-7]。装配后的机械式末端执行器结果如图5所示。
4 3D打印实物模型
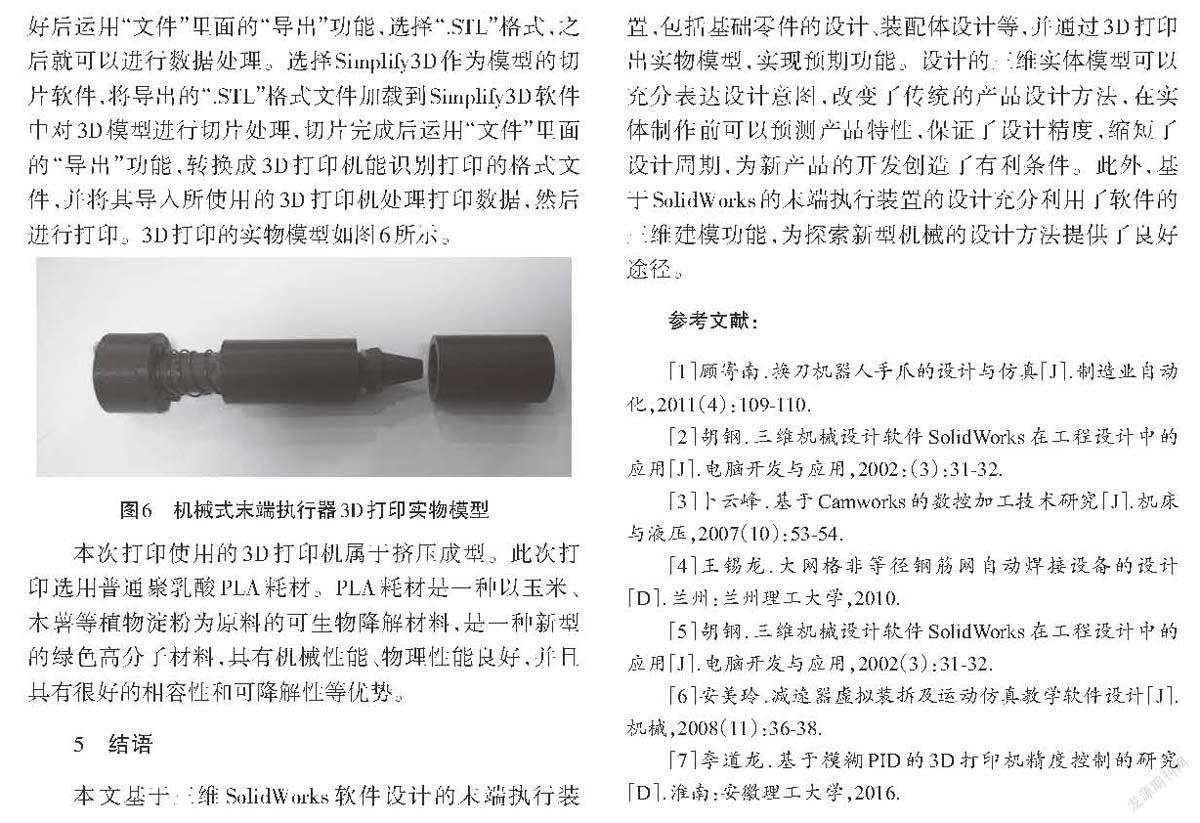
通过前面用SolidWorks软件构建三维模型,模型建好后运用“文件”里面的“导出”功能,选择“.STL”格式,之后就可以进行数据处理。选择Simplify3D作为模型的切片软件,将导出的“.STL”格式文件加载到Simplify3D软件中对3D模型进行切片处理,切片完成后运用“文件”里面的“导出”功能,转换成3D打印机能识别打印的格式文件,并將其导入所使用的3D打印机处理打印数据,然后进行打印。3D打印的实物模型如图6所示。
本次打印使用的3D打印机属于挤压成型。此次打印选用普通聚乳酸PLA耗材。PLA耗材是一种以玉米、木薯等植物淀粉为原料的可生物降解材料,是一种新型的绿色高分子材料,具有机械性能、物理性能良好,并且具有很好的相容性和可降解性等优势。
5 结语
本文基于三维SolidWorks软件设计的末端执行装置,包括基础零件的设计、装配体设计等,并通过3D打印出实物模型,实现预期功能。设计的三维实体模型可以充分表达设计意图,改变了传统的产品设计方法,在实体制作前可以预测产品特性,保证了设计精度,缩短了设计周期,为新产品的开发创造了有利条件。此外,基于SolidWorks的末端执行装置的设计充分利用了软件的三维建模功能,为探索新型机械的设计方法提供了良好途径。
参考文献:
[1]顾寄南.换刀机器人手爪的设计与仿真[J].制造业自动化,2011(4):109-110.
[2]胡钢.三维机械设计软件SolidWorks在工程设计中的应用[J].电脑开发与应用,2002:(3):31-32.
[3]卜云峰.基于Camworks的数控加工技术研究[J].机床与液压,2007(10):53-54.
[4]王锡龙.大网格非等径钢筋网自动焊接设备的设计[D].兰州:兰州理工大学,2010.
[5]胡钢.三维机械设计软件SolidWorks在工程设计中的应用[J].电脑开发与应用,2002(3):31-32.
[6]安美玲.减速器虚拟装拆及运动仿真教学软件设计[J].机械,2008(11):36-38.
[7]李道龙.基于模糊PID的3D打印机精度控制的研究[D].淮南:安徽理工大学,2016.
猜你喜欢
广东造船(2016年6期)2017-03-18
科技传播(2016年8期)2016-07-13
科技与创新(2015年21期)2015-12-01
