
基于力信息的人机协调运动控制方法
2018-09-08 01:06李军强齐恒佳张改萍赵海文郭士杰
计算机集成制造系统 2018年8期
李军强,齐恒佳,张改萍,赵海文,郭士杰
(河北工业大学 河北省机器人感知与人机融合重点实验室,天津 300130)
0 引言
随着机器人技术的发展,机器人越来越多被设想为人类的助手,在生产生活中密切配合人们的工作,应用人机协作的方式,共同完成复杂任务。作为人机协作、人机共融技术的研究内容之一,人机协调运动控制方法受到研究人员的重视,成为当前的研究热点[1]。
要实现人机协调运动,需要在机器人的控制系统中加入人类行为的特征信息,使其与人共同作业时更加适应人类的行为模式。人机协调运动控制方法主要包括负荷分配控制、阻抗控制[2]、直接力控制[3]等,其中Hogan阻抗控制算法将接触力信息和位置信息进行统一控制,最具代表性。然而阻抗控制主要应用于机器人与固定环境间接触力的控制,不能完全适应于机器人与人身体直接接触的情况,如果在工作中机器人与人身体直接接触,则需要机器人具有更加灵活柔顺的操作性能。Ikeura等[4-5]分析了人与人之间合作的特征,并根据速度的大小给定不同的阻尼参数,提出可变阻尼控制,但是仅凭借速度信息无法更好地实现人与机器人之间的柔顺控制,减小人机之间的作用力。本文建立了人机协作系统,该系统模拟人机之间的关系,应用力传感器感知人机交互力信息,选用伺服电机作为机器人的执行元件,利用伺服电机转速获取人体运动速度信息,根据人机相互作用过程中的力信息和速度信息识别操作者的运动意图,当操作者作加速运动时,减小控制系统的虚拟阻尼系数,当操作者作减速运动时,增大控制系统的虚拟阻尼系数,从而缩短机器人的响应时间,提高机器人的响应速度,改善系统稳定性及人机交互的柔顺性。
1 人机协调运动模型
人机协作时,机器人承担负载,操作者通过力传感器与机器人相互作用,机器人根据操作者的运动意图带动负载运动。人机协调运动模型如图1所示。
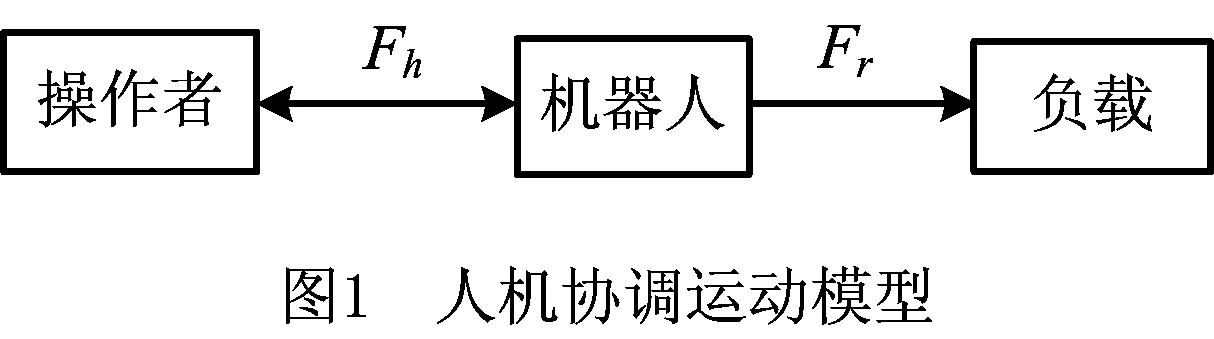
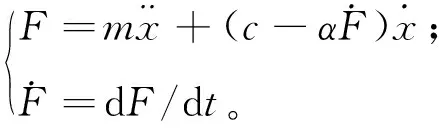
人与机器人协作搬运质量为M的负载,系统的动力学模型为:
(1)
式中:M为负载质量;m,c,k分别为人机协调运动控制系统的虚拟惯量、虚拟阻尼和虚拟刚度系数;Fh为操作者作用于机器人上的人机交互力;Fr为机器人作用于负载上的力。
由人、机器人和物体的关系可知,负载重量由机器人承担,而人机协调运动效果取决于参数m,c,k。本文在导纳控制的基础上提出可变阻尼导纳控制方法,主要应用人机交互力与运动速度的关系来判断人的意图,进而改变虚拟阻尼系数的大小,达到缩短机器人响应时间、提高系统稳定性的目的。
2 可变阻尼导纳控制方法
2.1 导纳控制方法
在人机协调运动中,输入力与速度不是简单的线性关系,而由于力传感器获取的力信息包含噪声,需要对于力信息进行滤波处理,以保证人机协调运动的平稳性[6]。获得人机交互力信息后,通过导纳控制算法得到执行元件期望的运动速度。基于导纳控制的人机协调运动控制模型如图2所示。
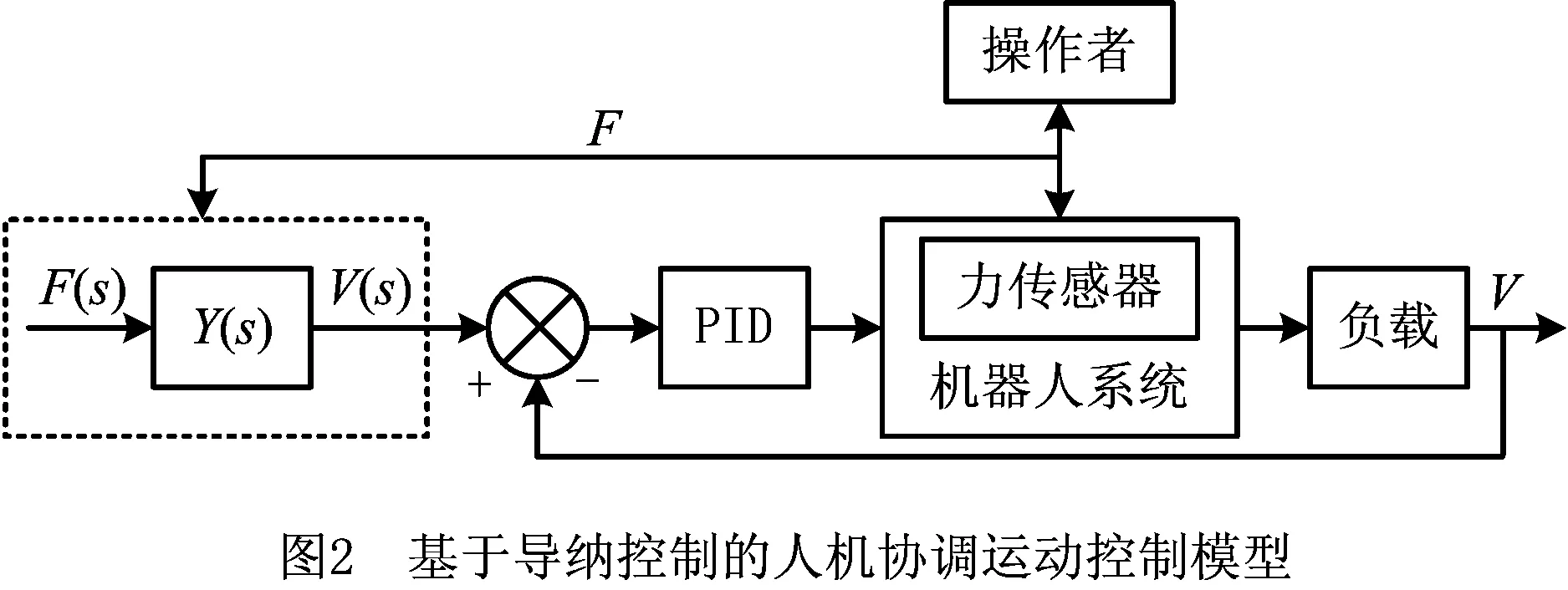
导纳理论源于机械阻抗,是一种基于广义惯量、阻尼和刚度的等效网络思想,通过将实际的物理系统比拟成一个具有导纳(或阻抗)特性的简单输入输出系统,构建作用力与期望速度之间的联系。导纳是阻抗的倒数,定义为
(2)
式中:M,C,K分别为广义惯量、广义阻尼和广义刚度。
2.2 可变阻尼导纳控制方法
人机协调运动的过程是模拟人操作某一负载的过程,而人体作用力作用于负载使负载运动时,刚度系数多为0,因此设定控制系统的虚拟刚度系数k=0。人机协作中通常只考虑人机交互力的大小和方向,不考虑作用力的变化[7]。本文提出利用人机交互力的变化与操作者的运动状态推测操作者运动意图的方法,根据力的变化调整控制系统的虚拟阻尼参数,以提升系统的响应速度。可变阻尼参数调整遵循如下规则:
(1)当dF<β时,操作者正常施加作用力,则包含力的变化信息的可变阻抗控制规则为:
1)速度从0开始,或者突然增大沿速度方向的力,并且力的变化满足一定范围,可以推断操作者要加速,此时的高阻尼将会限制机器人的跟随速度。因此,应该减小控制系统的阻尼参数c,即|dF|↑⟹c↓,则人机交互力与运动速度、加速度的关系为
(3)
2)原速度方向上的力突然减小,表现为减速,可以推断操作者想停下来或者改变方向。此时应增大控制系统的阻尼参数值,减小系统响应时间,即|dF|↓⟹c↑,则人机交互力与运动速度、加速度的关系为

(4)

为了满足人机协调运动,使操作者感到舒适、安全、稳定,力的增量应该在一定范围内,即|dF|<β,如果dF>0时的加速度大于0,则表明操作者想加速,否则为想减速。
(2)当|dF|≥β时,表示人机协作异常,即人机操作力产生了一个突变,应该滤除该时刻的力信息,机器人维持上一时刻的作用力,不发生变化。
3 控制系统参数的确定
3.1 人机协调实验系统的建立
为了有效验证所提方法的有效性,防止验证设备过于复杂以及多自由度运动控制耦合对实验产生的影响,本实验采用单自由度平移机器人系统与人进行协作,人机协调运动实验系统的硬件主要由工业PC机、力信息采集模块、伺服控制系统、运动执行模块组成,其中力信息采集模块包括六维力传感器和匹配的数据采集卡,人机之间的作用力通过六维力传感器获取,如图3所示。

3.2 导纳控制参数的确定
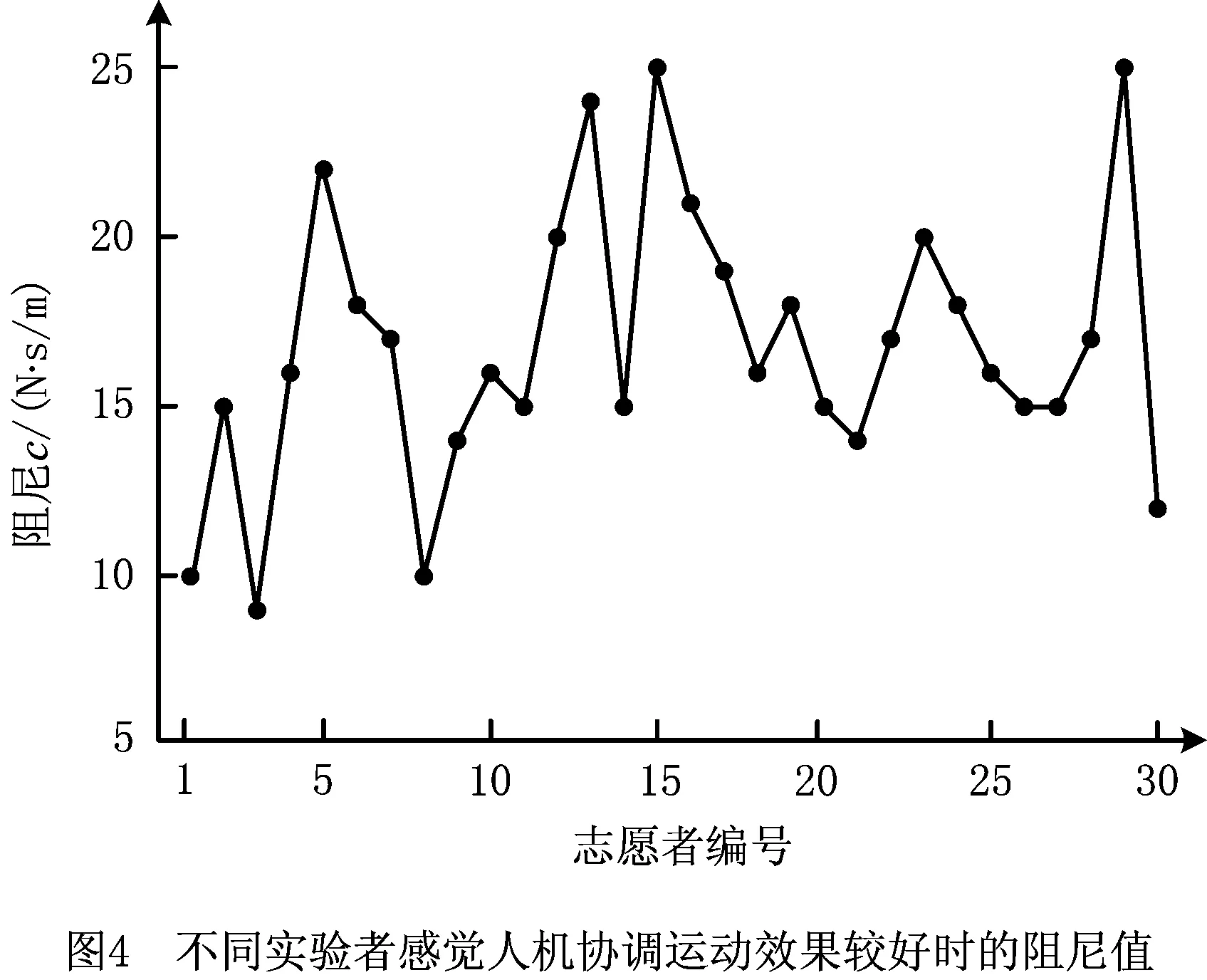
实验系统中,力传感器安装于线性模组滑块上,传感器上安装有手柄,人手作用于手柄上;人手移动滑块的距离在400 mm以内,有上下限位开关用于防止发生碰撞;启动、移动、停止由实验者决定;实验前,找30名学生志愿者,包括男性和女性,年龄介于20~30岁,身心健康,先前没有接触过实验装置,让志愿者在两个极限位置之间运动并对操作感觉做出主观判断。设惯性质量参数m=0.5 kg,分别设定不同的阻尼参数10,15,20,25,30(N·s/m),让志愿者在不同阻尼参数下重复动作,记录不同阻尼参数下对人机协调运动效果的主观判断。各志愿者感觉人机协调运动效果较好的阻尼值如图4所示。
记录运动过程中的力信息与速度信息的变化范围,以及志愿者在不同阻尼参数下对稳定性、舒适性的主观判断,以在人机协调运动中考虑志愿者的舒适性。志愿者对不同阻尼下操作性能的打分情况如图4所示。
基于力信息的人机协调运动中,输入力信息存在噪声,在利用力信息进行控制时,需要对其进行滤波[7]。实验采用Butterworth低通滤波器,设置采样频率为1 000 Hz,截止频率为30 Hz,阶数为1。未经滤波和经过滤波处理的力信息随时间的变化如图5所示。

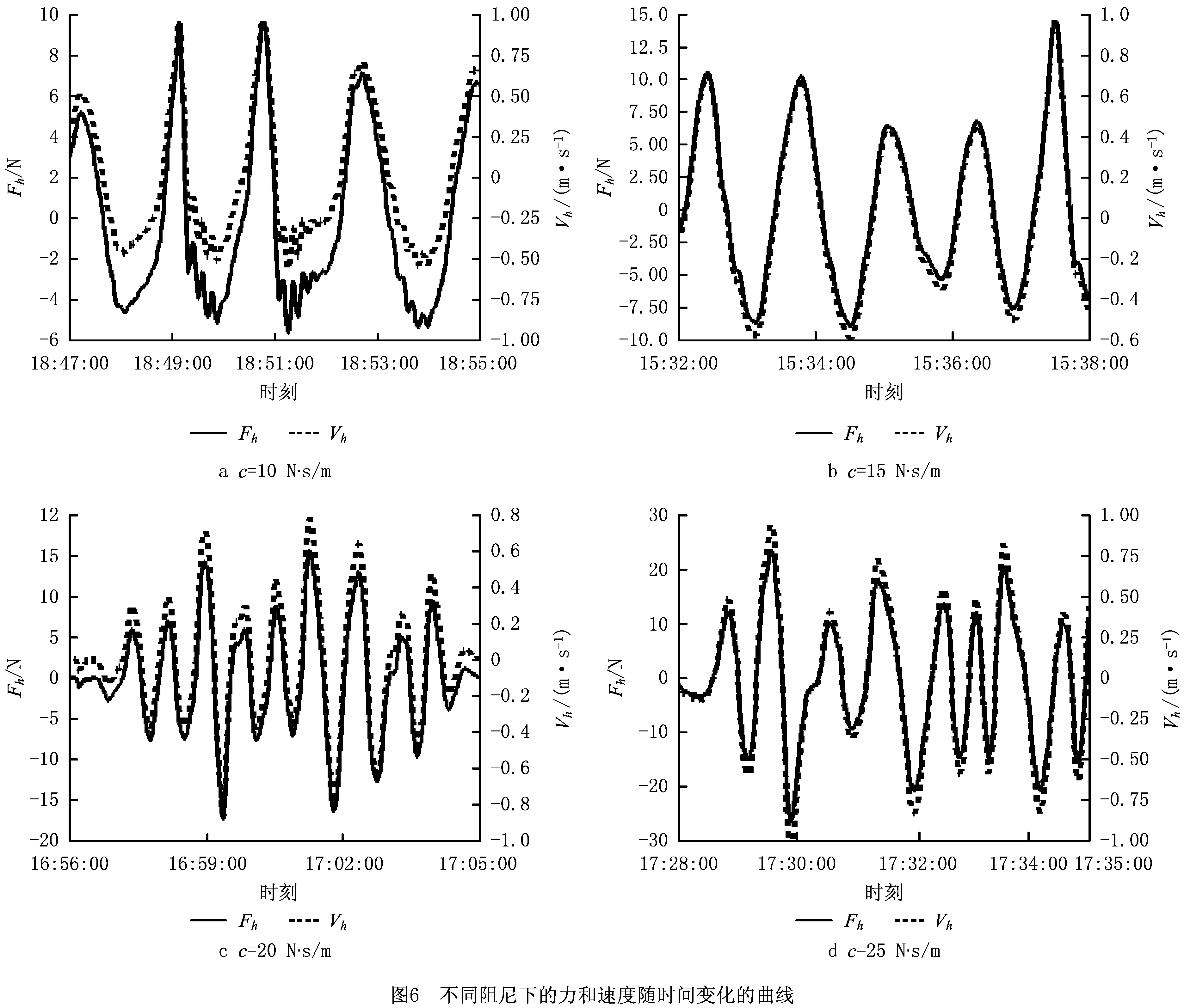
为研究不同阻尼系数对人机交互力和运动速度的影响,选取1名志愿者记录其运动过程中的力信息与速度信息的变化范围,志愿者在不同阻尼系数下的力和速度随时间变化的曲线如图5所示。图6所示为不同阻尼下力和速度随时间变化的曲线,其中Fh和Vh分别表示志愿者的作用力和速度。由图6可知,人机之间的相互作用力Fh增大时,志愿者感觉费力;Fh突然增大时,随着控制系统阻尼值的增大,其变化曲线趋于平滑,系统稳定性得到提升;但是随着控制系统阻尼值的增大,同样速度下增大Fh将对人机协调运动效果产生不利影响。综合考虑志愿者的评价得出如下结论:
(1)在力没有突变的情况下,志愿者感觉到最优操作性能对应的导纳控制阻尼参数介于某一范围,当控制系统阻尼值介于15 N·s/m~20 N·s/m时,人机协调运动效果较好。
(2)由志愿者在不同阻尼下的速度范围与人机交互力信息的变化范围可知,速度变化介于-1 m/s~1 m/s、Fh在10 N~15 N时,志愿者感觉人机协调运动效果较好。
3.3 可变阻尼中权重因数的确定
在人机协调运动中,开始操作时人的力和意图不确定,当操作力突然增大时,在不可变阻尼的控制下,系统会有突然增大的加速度,志愿者会本能地提高自身手臂的刚性[8],让机器人在某个位置停下,机器人则会在期望的位置附近振动几次后停下来。由力、速度、位置随时间的变化可知,应用不可变阻尼控制方法,当人机相互作用力突然增大时,人机协作系统容易不稳定,系统存在震荡,超调量达到33%。如图7所示。

在|α|=0.01,0.02,0.03时进行实验,获得人机相互作用力F,以及dF、控制系统阻尼c、志愿者速度V和位置P随时间的变化曲线,如图8所示。由图8可知,当|α|=0.01,0.02,0.03,人机相互作用力没有突变时,阻尼连续变化,机器人位置曲线顺滑。当|α|=0.01时,操作力突然增大,即|dF|>2N,控制系统阻尼增大到20 N·s/m,但是仍不足以维持系统稳定,人机协作系统发生震荡,振动几次停下来。当|α|=0.02时,阻尼的变化范围在15 N·s/m以上,满足系统稳定性要求,实验者舒适性好;当操作力突然增大,即|dF|>2 N时,阻尼增大到21 N·s/m以上,可以维持人机协作系统的稳定。当|α|=0.03时,志愿者施加的力增大且变化率比较大,阻尼低于15 N·s/m,系统容易不稳定,有振动现象;当操作力突然增大,阻尼增大到25 N·s/m左右时系统稳定,但是志愿者感觉到较大的人机相互作用力。
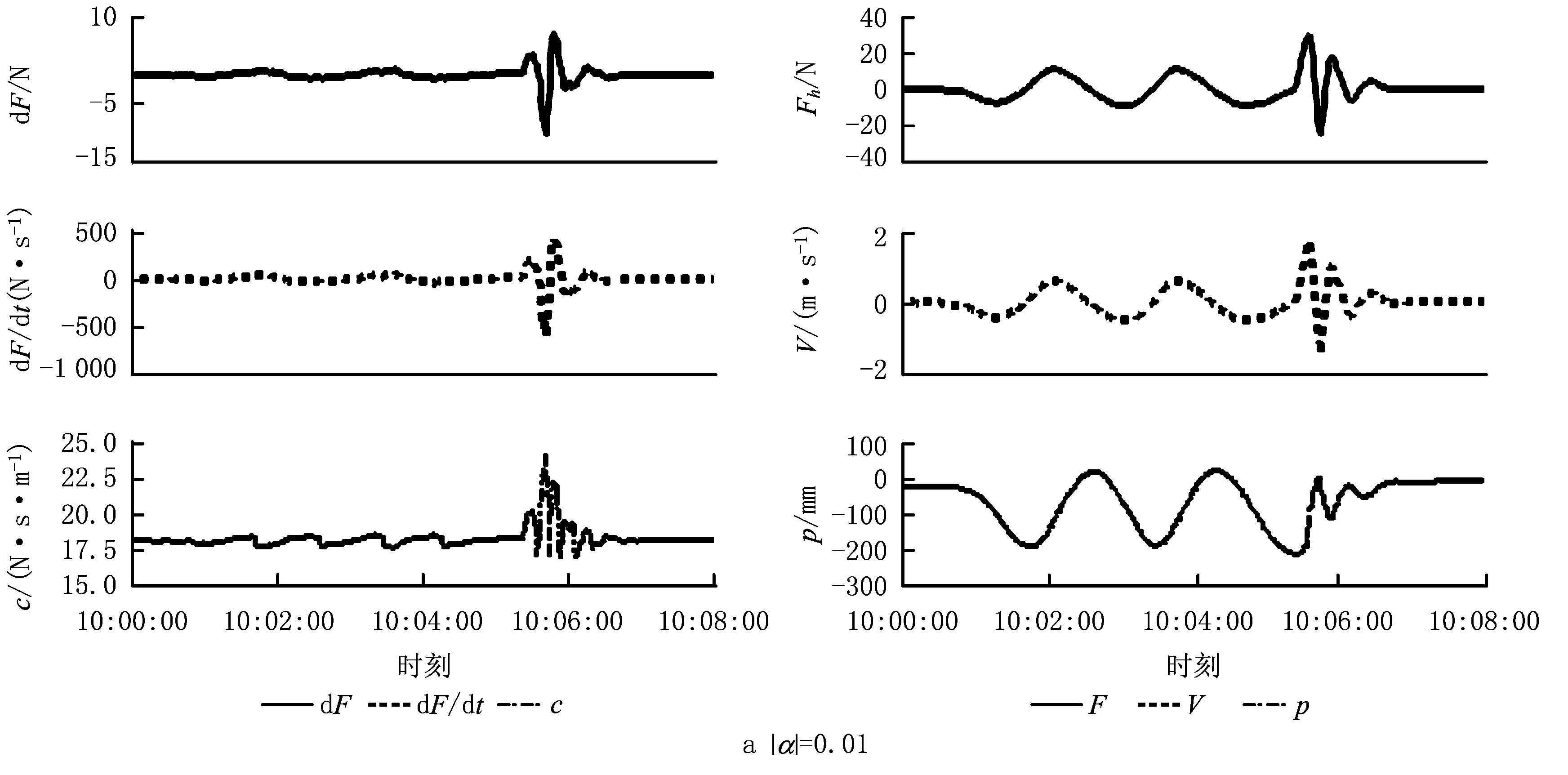
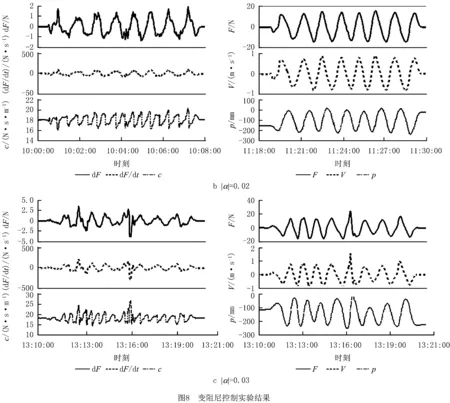
实验验证了可变阻尼控制的可行性,dF可以用来识别实验者的意图,实现控制系统阻尼的连续变化,从而实现柔顺动作并减小振动。综合比较|α|=0.01,0.02,0.03时的操作性能,确定|α|=0.02时的系统阻尼变化范围满足系统稳定、操作舒适度高的要求。
4 结束语
本文对人机协作机器人的控制方法进行了研究。针对基于力信息的人机交互特点获取人体运动意向信息,提出可变阻尼的导纳控制方法,确定了人机交互力信息与控制系统阻尼变化量之间的关系,即当阻尼介于15 N·s/m ~20 N·s/m、权重因数|α|=0.02时,人机协调运动效果较好。因为变阻尼导纳控制可以改善人机协作系统的性能,减小振动,所以能够提高系统稳定性及人机交互的舒适性。
人机协调运动技术是机器人技术领域较新的研究方向,今后研究将结合智能控制、机器学习和人体生物力学等多学科知识,获得更优的人机协调运动效果。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
影像研究与医学应用(2021年15期)2021-09-12
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
南都周刊(2021年3期)2021-04-22
介入放射学杂志(2020年1期)2020-04-11
北方工业大学学报(2019年5期)2019-03-30
无线互联科技(2018年20期)2018-12-27
海外星云(2016年7期)2016-12-01
