采用指纹SD权重的FM两级室内定位方法
2018-09-03 00:46万国龙秦红磊
导航定位学报 2018年3期
屈 阳,万国龙,丛 丽,秦红磊
(北京航空航天大学 电子信息工程学院,北京 100191)
0 引言
基于调频(frequency modulation,FM)广播的定位技术的研究历史可追溯至20世纪90年代,最早是采用移动接收机检测接收到的FM信号的相位进行定位[1],经过近30年的发展,目前常用的基于FM的定位技术主要有K-近邻定位算法(K-nearest neighbor,KNN)、K-加权近邻定位算法(K-weighted nearest neighbor,KWNN)、高斯过程回归算法(Gaussian process regression,GPR)等技术[2]。公共FM广播信号由于其信号稳定、信号穿透能力强、覆盖范围广、硬件设施要求低等优点[3]而被广泛应用于室内定位。
在使用FM进行室内定位的研究中,FM频道的数量对定位精度有很大影响。文献[3-6]详细研究了FM频道数量的影响,其在采用了76个公共频道和3个信标的前提下,其2σ定位误差为4.71 m。在室内定位中,小范围环境中较少存在指纹模糊的现象,比如单独的一个小房间;大范围环境中,由于室内环境的复杂性,FM信号受室内环境的影响较大,容易造成指纹的模糊,比如整个回字形类的建筑。目前现有的解决方式主要有:1)欧氏距离的计算,比如根据信号的相关性调整欧氏距离[7]、根据当前环境在欧氏距离计算时进行环境自适应参数调整[8];2)利用信号的传播特性建立信号传播距离与实际物理距离之间的模型[9];3)定位算法的改进,比如基于距离权重的指纹定位算法[10]。此外,由于FM信号的波长约为3 m,这就造成单纯采用FM信号的定位精度很难超过3 m,由此催生了FM信号与其他信号进行组合定位的研究,常用的有无线保真(wireless fidelity,WiFi)11]信号、蓝牙信号、数字电视地面多媒体广播信号[12]、数字视频广播信号[13]等多种信号源,对于提升定位精度有较大帮助。
本文针对指纹模糊的问题,基于FM频道波动越大,对定位的贡献越大的理论,根据采集到的FM频道指纹的标准差来调整欧氏距离的权重,同时将定位过程拆分为区域定位和精确定位,提出了基于指纹标准差(standard deviation,SD)权重的FM两级室内定位算法。
1 指纹定位简介
指纹定位分为2个阶段:离线阶段和在线定位阶段。离线阶段是采集区域的数据特征,在本文中为采集公共FM广播的信号特征;在线定位阶段是利用定位算法进行用户位置解算。定位过程框图如图1[2]所示。
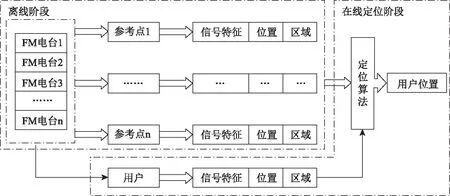
图1 基于指纹的FM广播信号定位方法
2 室内定位算法
2.1 定位描述
在实验区域中,预先测量得到的指纹数据库可以表示为
Ε={(eji,pi)|j=1,…,N,i=1,…,k}
(1)
式中:j为外辐射源个数;i为参考点(reference point,RP)个数;eji为第j个外辐射源在第i个RP的指纹位置;pi为第i个RP的位置,二维空间中,通常pi=(xi,yi);N为外辐射源的数量;k为参考点的数量;E为指纹数据库。
用户所在位置指纹已知,则可以表示为
E0={(ej0,p0)|j=1,…,N}
(2)
式中:ej0为用户所在位置的第j个外辐射源的指纹位置;E0为用户所在位置的指纹位置。采用合适的定位算法来求解用户所在位置p0。
2.2 定位算法
2.2.1KNN区域定位算法
在KNN区域定位算法中,首先计算用户所在位置的指纹与所有已知点的指纹的欧氏距离,即
(3)
式中:ΔE=[ΔE1,ΔE2,…,ΔEk]为用户与所有已知参考点的欧氏距离的集合,其中ΔEi为用户与第i个RP的欧氏距离。根据欧氏距离选取m(m≥1)个近邻点(通常m不宜过大,应根据实际情况进行选择),则选取的最小的m个欧氏距离的集合可表示为

(4)
式中h为选择的第h个近邻点。则选取的近邻点所对应的RP的集合可表示为
一个偶然的机会,我在一位收藏家朋友的票夹里看到几枚1944-1946年由晋冀鲁豫边区政府发行的粮票,出于粮食工作的职业本能,我好说软磨,硬是花钱将其买了下来,作为我的藏品。这是很珍贵的历史文物,是我党我军光辉历程的历史见证,反映了粮食工作在中国革命历史时期发挥的重要作用。自此我非常注意军用粮票及有关资料的收集,翻开收藏的军用粮票纪念册,重温我党我军的历史,使我更加热爱和珍惜现在的幸福生活。
P_ΔP={P1∪…∪Ph|h=1,…,m}
(5)
式中Ph为选择的第h个RP。由于每个近邻点均有其区域信息,则区域定位结果的集合可表示为
Z_ΔP={Z1∪…∪Zh|h=1,…,m}
(6)
式中Zh为第h个RP的区域信息。
KNN区域定位选择集合Z_ΔP中个数最多的子集作为区域定位结果,若存在2个不同子集的个数既相同且最多的情况,则将欧氏距离最小的近邻点所在的区域信息作为区域定位结果。
2.2.2KWNN精确定位算法
KWNN定位算法将每个近邻点的位置(xi,yi)用式(3)中的欧氏距离的倒数进行加权后得出用户的位置坐标,即

(7)
式中ε为趋近于0的小数。
2.3 基于指纹SD权重的定位算法
为了增加欧氏距离判断的可信度,提出了基于指纹SD权重的FM两级室内定位算法即标准差权重(standard deviation-weight,SDW)算法。算法的原理如下:
式(3)表征了用户与各参考点之间的欧氏距离,可以看出:电台波动范围越大,其欧氏距离判断越明显,对后续的定位解算贡献也越大。根据已有指纹,计算出FM各个频道的SD,再据此对其赋予权值。假设权值为ωj,则欧氏距离为
(8)

0.2·x·SD1+…+0.2·N·x·SDN=1
(9)
解出x,则对应的第j个频道的权值为
ωj=0.2·j·x·SDj
(10)
式中:SDj为第j个频道的SD值。定位过程分为区域定位和精确定位。将SDW算法计算出的欧氏距离应用于区域定位和精确定位,在区域定位后,根据判定准则,判断是否剔除不属于定位区域的近邻点。
判定准则:当Z_ΔP中个数最多的子集数量超过设定的门限值时,精确定位时仅选择属于定位区域的近邻点。由式(6)可得Z_ΔP,假设Z_ΔP中个数最多的子集为Zn,其个数为n,则:


3)若1)、2)均不满足,不执行此准则。
当执行此准则时,此时用户位置坐标可表示为
(11)
3 实验与结果分析
3.1 实验设置
实验区域为北京航空航天大学新主楼F座3楼,实验区域如图2所示。实验数据为使用Tektronix频谱仪采集的FM广播21个频道的数据,实验选择的近邻点个数k为从1到10线性递增,定位区域中指纹数据分为7个区域,共计912个RP(图中仅标注出部分RP)。随机从该指纹数据库中选择45个点作为测试点,余下的点作为RP。实验结果是在50次蒙特卡洛下得出的。
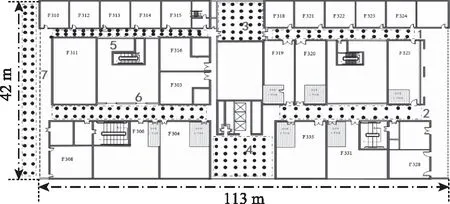
图2 室内实验区域
3.2 结果分析
3.2.1 区域定位精度
此性能指标选择为k取不同值时的平均区域定位精度(如图3所示)。
从图中可以看出,SDW算法对于提升区域定位精度有较为明显的改进,KNN算法区域平均定位精度最低为95.24 %,而SDW算法区域平均定位精度最低为97.02 %。此外,在进行蒙特卡洛时,几乎可以保证区域定位精度不会退化。表1为区域平均定位精度最差时不同k值下的区域定位精度。
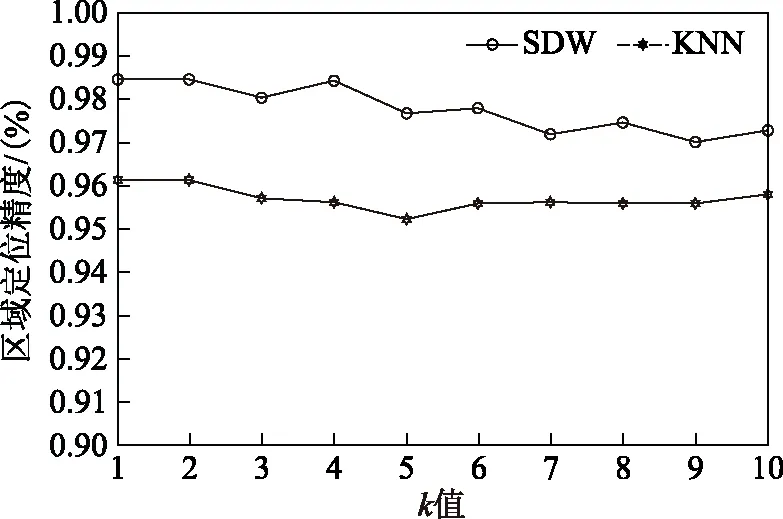
图3 KNN与SDW区域平均定位精度

表1 2种算法在区域平均定位精度最差时分别对应的区域定位精度
3.2.2 精确定位精度
1)1σ和2σ定位误差:
图4和图5分别给出了SDW算法和KWNN算法在50次蒙特卡洛下的1σ和2σ定位误差,其中σ为标准差。表2和表3分别给出了2种算法在50次蒙特卡洛下的1σ和2σ最大、最小和均值定位误差。
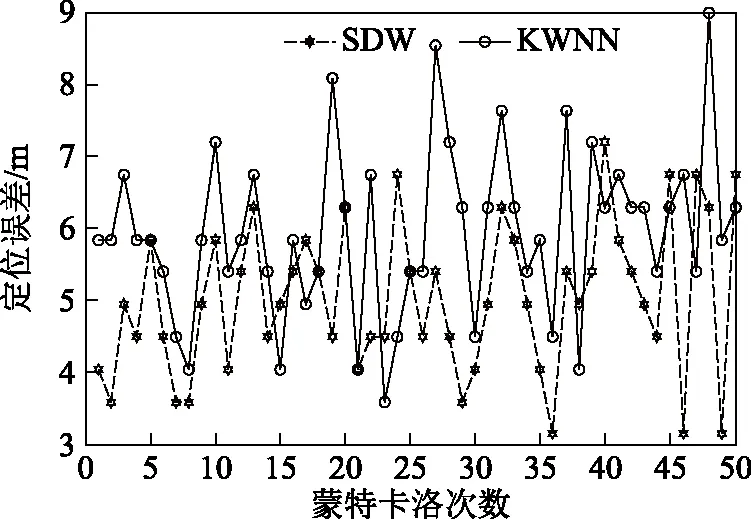
图4 1σ定位误差
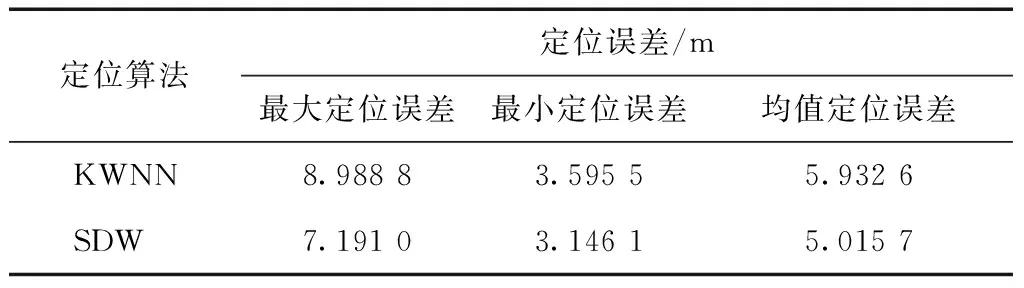
表2 1σ时2种算法对应的最大、最小和均值定位误差
从图4和表2可以看出,SDW算法在50次蒙特卡洛下,1σ定位误差在绝大部分情况下定位误差得到改善,且1σ的平均定位误差相较KWNN算法定位误差改进了0.916 9 m,定位精度提升了15.5 %左右。

图5 2σ定位误差

表3 2σ时2种算法对应的最大、最小和均值定位误差
从图5和表3可以看出,SDW算法在50次蒙特卡洛下,2σ定位误差在绝大部分情况下定位误差得到改善,且2σ的平均定位误差相较KWNN算法定位误差改进了3.847 2 m,定位精度提升了22.6 %左右。
2)平均均方根误差:
表4给出了SDW、KWNN算法在50次蒙特卡洛下不同k值对应的平均均方根误差。
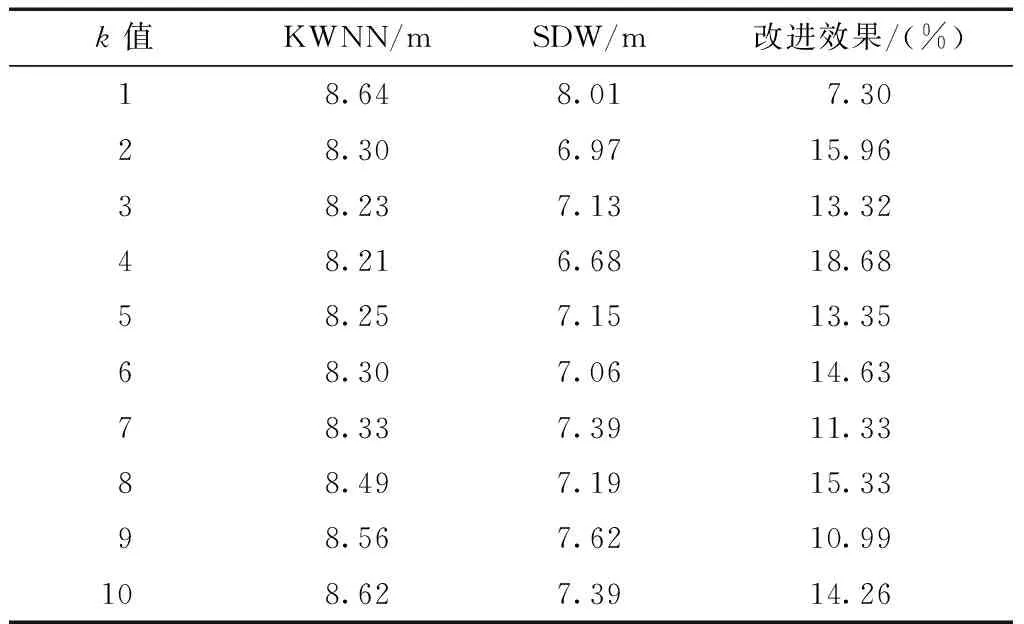
表4 50次蒙特卡洛下的平均均方根误差
从表中可以看出,无论k取何值,其平均均方根误差均得到改善,当k=4时,其平均均方根误差降低了18.68 %。结果表明,SDW算法相较KWNN算法,其定位结果的均方根误差得到了改善。
4 结束语
本文提出了基于SD权重的FM两级室内定位算法,该算法充分利用了FM各个频道的波动情况,有效降低了指纹的模糊性;同时将定位过程划分为区域定位和精确定位,进一步降低了错误近邻点的影响。实验表明:与KNN区域定位算法相比,SDW算法能够提供更加准确的区域信息;与KWNN精确定位算法相比,其1σ、2σ定位误差和平均均方根误差均得到显著改善。因此,SDW算法相较传统指纹定位算法更具优势。下一步研究重点为优化权值及门限的自适应调整。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
北京大学学报(自然科学版)(2022年2期)2022-04-09
导航定位学报(2021年4期)2021-08-29
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
北京汽车(2018年5期)2018-11-06
儿童时代·快乐苗苗(2016年2期)2016-10-22