一种基于CORS的GNSS事后精密定位服务平台建设方法
2018-08-31 05:46董明旭刘紫平郝建明匡翠林
测绘通报 2018年8期
董明旭,楚 彬,刘紫平,郝建明,匡翠林
(1. 湖南省测绘科技研究所,湖南 长沙 410007; 2. 中国测绘科学研究院湖南分院,湖南 长沙 410007; 3. 中南大学地球科学与信息物理学院,湖南 长沙 410083)
在高精度位置服务领域,主要依托全球导航卫星系统(global navigation satellite system,GNSS)技术来实现[1],通过建立卫星导航定位基准站系统(continuously operating reference stations,CORS)实时不间断观测GNSS卫星信息,可以快速有效地削弱轨道、钟差和大气等主要的误差影响,从而实现实时厘米级和事后毫米级精度定位[2-3]。作为空间数据基础设施的重要组成部分,湖南省卫星导航定位基准站网(HNCORS)于2008年开始投资建设,于2011年完成一期建设并投入试运行。2014年,平台全面展开二期暨北斗兼容升级建设,成为全国首家提供兼容北斗差分改正信息的省级CORS平台[4]。HNCORS在构建全省统一的地理空间框架、维系覆盖全省的三维地心测绘基准体系、推进地理国情和不动产统一登记基础数据生产、数字城市和智慧城市建设的过程中发挥了不可替代的作用。
然而,湖南地区地形以丘陵为主,存在部分无线通信信号盲区,实时高精度位置服务无法全范围覆盖,尤其在实时载波相位差分定位(real time kinematic,RTK)服务方面,问题尤为突出[5]。此外,湖南是一个地质灾害多发的省份,基于CORS的地质灾害应用和变形监测,均需更高精度级别(毫米级)的定位需求。一般的单位并不具备服务条件,其原因如下:①高精度远距离GNSS解算须采用国际知名的软件,如GAMIT/GLOBK、Bernese、GIPSY等,此类软件一般价格昂贵且操作十分复杂,应用门槛较高[6];②基于CORS高精度GNSS解算需要基准站的高精度坐标和位移速率数据,从测绘成果保密的角度,不允许将这些数据播发给普通用户;③基于CORS的高精度解算须依赖于基准站的观测数据,这些保密数据的获取需要经过行政审批,周期较长,无法满足应急测绘的需求;④目前提供高精度事后差分解算服务均是采用人工方式进行,需要投入大量的人力物力,且时间严重滞后,远远不能满足广大用户的高精度解算需求。针对以上问题,本文研究基于CORS的GNSS事后精密定位服务平台建设方法,采用Perl编程语言对Bernese二次开发实现数据自动解算,并基于Internet的数据加密推送,面向用户推出在线自助解算服务,用于解决无移动通信信号覆盖时的高精度定位问题,同时满足用户高效率、低门槛的事后高精度(厘米级至毫米级)位置服务需求。
1 平台架构
平台采用低耦合架构设计,将数据解算与业务处理相分离。由于基准站数据涉密,数据解算采用纯内网环境的本地服务器与CORS数据中心进行连接,根据待解算观测数据匹配最优3个基准站点同步观测数据进行联合解算;业务处理采用公网环境下云服务器,实现高并发访问情况下实时扩容,满足海量级用户业务请求处理;在数据解算服务器和业务处理服务器之间,通过建立反向代理服务器,对外(业务服务器)建立任务队列获取待解算观测数据,并供解算服务器调用,对内(解算服务器)将解算结果进行加密处理,并推送至业务服务器。平台架构如图1所示。

图1 平台架构
平台数据流程如下:
(1) 用户通过Web系统提交待解算的观测数据。
(2) 业务服务器一方面受理用户请求,另一方面下载对应的IGS产品,然后将数据进行打包。
(3) 反向代理服务器建立任务队列,将打包完成的待解算数据进行排队并等待解算。
(4) 解算服务器主动向代理服务器获取待解算任务,同时向CORS数据中心请求对应基准站同步观测数据,并按任务队列情况进行排队解算。
(5) 解算服务器解算完成的任务推动至反向代理服务器。
(6) 反向代理服务器更新任务队列,并将解算结果推送至业务云服务器。
(7) 业务云服务器响应用户请求,并通过Web系统供用户下载解算结果。
由上可知,本地解算服务器处于纯内网环境,采用主动获取解算任务的形式,只需根据任务队列排队处理待解算的数据即可,与具体业务请求无关,解算压力恒定。业务云服务器负责处理公网环境下与用户相关的业务请求,可根据请求量进行实时弹性扩容,满足海量级用户高并发业务请求处理。
2 关键技术
2.1 基于Internet的数据双重动态加密传输方法
数据安全处理包括解算服务器的坐标数据偏移,代理服务器的结果文件加密、参数加密、业务服务器的参数解密、用户端结果文件解密,以及坐标数据纠偏3部分。其主要步骤如下:
(1) 平台初始化时采用RSA算法[7]生成一组常量密钥Keyc和Screatc,分别存放于代理服务器和业务服务器中,用于加密和解密动态参数文件。
(2) 当数据解算完成时,解算服务器将坐标结果结合当前时刻时间戳进行偏移,并输出坐标结果(CSV)和解算报告(PDF)两个文件,同时将时间戳参数传输至代理服务器。
(3) 代理服务器采用随机密钥KeyR对结果文件采用高级加密标准(advanced encryption standard,AES)[8-9]进行加密,并生成自定义*.sobds格式加密数据文件;然后采用常量密钥Keyc将随机密钥和偏移时间戳进行加密,生成自定义*.code格式加密参数文件。
(4) 代理服务器将*.sobds格式加密数据文件和*.code格式加密参数文件推送至业务服务器。
(5) 业务服务器提醒用户登录Web前端下载解算结果,当用户成功下载*.sobds文件后,业务服务器采用常量密钥Screatc对*.code文件进行解密,并将随机密钥KayR和偏移时间戳转换成手机验证码,以短信的形式发送至用户。
(6) 用户将下载好的*.sobds文件放到未连接外网的电脑上,并通过解密软件输入手机验证码将*.sobds文件进行解密并纠偏,输出真实的解算结果(CSV和PDF文件)。
综上,数据安全处理及加密传输流程如图2所示。
2.2 基于Bernese的GNSS静态数据自动解算方法
获取待解算文件后,解算模块通过匹配测站附近最近的3个CORS基准站,同步解算得到3条基线向量和法方程,再综合3条基线结果得到最终的用户站坐标。整个解算过程采用Perl编程语言调用Bernese批处理引擎实现,主要包括以下步骤:
(1) 数据准备。包括观测文件、星历文件及更新数据处理所需的表文件,并RINEX格式的数据转化成Bernese二进制格式文件,以加速数据读取速率。
(2) 卫星轨道标准化。采用PRETAB程序将精密星历从地心地固坐标框架转换为惯性坐标框架,并提取卫星的钟差,采用ORBGEN程序由轨道表文件产生标准轨道文件,通常每一天产生一个标准轨道文件。
(3) 接收机时钟改正量计算。采用CODSPP程序计算时钟改正量,并储存在相位和伪距观测文件中。
(4) 形成基线文件。采用SNGDIF程序根据最大观测值准则(OBSMAX)在整个处理网中选取两测站间共同观测量为最多者组成基线,形成独立的基线单差文件。

图2 数据安全处理及加密传输流程
(5) 相位观测值预处理。采用MAUPRP程序进行相位观测值预处理,获取干净的相位观测值。
(6) 参数估计。采用GPSEST把预处理的相位观测量组成二次差观测值以求解坐标参数。在具体求解时采用QIF方式[10]求解模糊度,并且忽略基线的相关性,用逐条基线求解,历元参数一般先预消除,然后在法方程层次上回代求解。
(7) 多时段综合解。采用ADDNEQ2程序将步骤(6)所得各时段的全部基线解作为伪观测值再进行平差,以求的更精确的参数解。
综上,Bernese软件双差数据处理的流程如图3所示。
3 应用测试
3.1 功能测试
为了掌握平台的服务性能,通过对平台可用性、兼容性和系统容量等内容进行了详细测试,得出结论,见表1—表3。

表1 可用性测试内容及结果
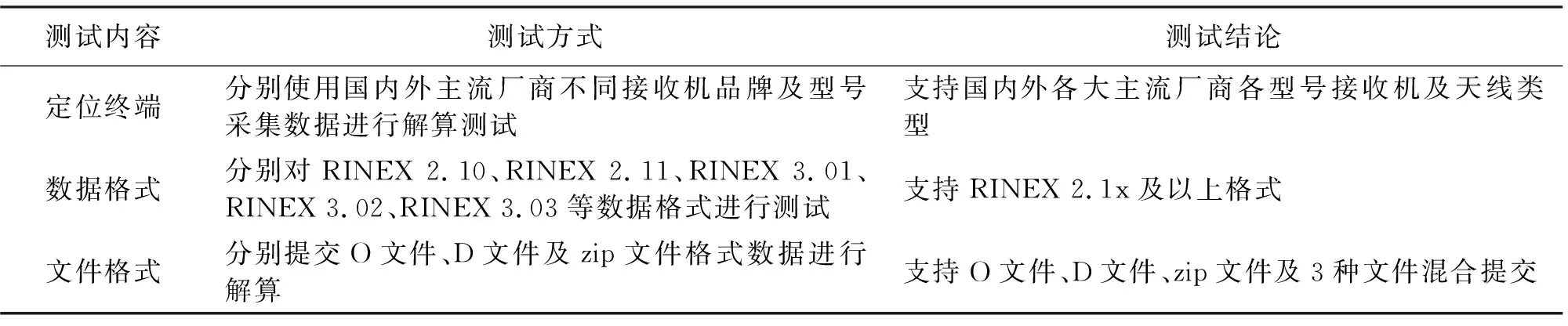
表2 兼容性测试内容及结果

表3 容量测试内容及结果

图3 Bernese处理引擎高精度数据处理流程
3.2 精度测试
定位精度是本平台服务的最重要指标,包括内部精度指标和外部精度指标。内部精度指标用来衡量系统内部数据处理的稳定性和可靠性,外部精度指标则反映定位结果与参考值的附和程度。
测试数据来源于实际工程项目观测数据,包括天宝、徕卡、华测、南方和中海达等5个品牌接收机共计50个站点数据,并利用这些数据做了短时长和长时长两个方面的测试。
3.2.1 短时长测试(观测时间小于1 h)
分别将实测数据采用GFZRNX软件切分成观测时长为5、10、20、30、40、50、60 min时段共计350个观测文件,并提交至平台进行解算。其中5 min 时段数据未能解算成功,其他时间能正常解算,内符合精度、外符合精度结果分别如图4和图5所示。
分析图4可知,观测时长小于30 min时,内符合精度在分米级,整体稳定性较差;观测时长30和40 min时,平面内符合约为3 cm,竖直方向在5 cm;50和60 min时,内符合精度约为2 cm。总体来看,当观测时长在大于30 min的情况下,解算结果的稳定性较高。

图4 实测数据短时长内符合精度统计
由本平台自动解算得到的坐标与通过静态解算软件全时长手动解算得到的坐标进行比较分析,得到外符合精度统计结果,因此外符合精度仅反映自动解算与人工解算结果之间的偏差。如图5所示,观测时长小于40 min时,外符合精度约为分米级;≥50 min时,平面外符合精度约为3 cm,竖直方向约为5 cm。总体来看,随着观测时间的增加,实测数据外符合趋于收敛,与手动解算结果偏差较小。
3.2.2 长时长测试(观测时间为2~6 h)
由于实测数据只测量了6 h,因此将实测数据按2、4和6 h进行切分并提交至平台计算,统计得内符合精度、外符合精度结果如图6和图7所示。

图5 实测数据短时长外符合精度统计
由图6和图7可知,当观测时长大于2 h时,实测数据通过平台自动解算得到的结果在平面方向、竖直方向内符合均在毫米级,说明本系统的稳定性非常高。实测数据外符合精度在平面方向达到毫米级,竖直方向为厘米级,与人工解算结果偏差较小。
3.3 测试结论
经过以上对平台功能及定位精度测试分析,可得出以下测试结论:
(1) 平台各功能模块性能完备,完整性好、兼容性高,能实现GNSS静态观测数据全自动处理单个文件解算耗时5 min以内,数据处理效率较高。
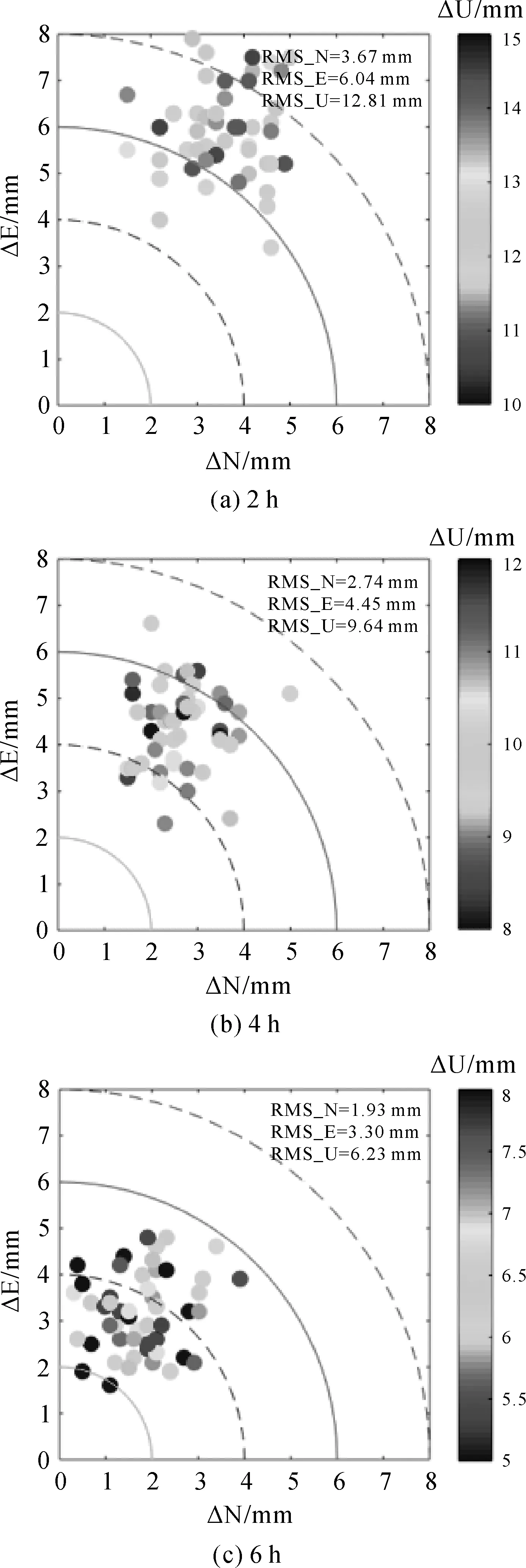
图6 实测数据长时长内符合精度统计

图7 实测数据长时长外符合精度统计
(2) 基于Internet在线数据加密传输方法稳定性较好,可为敏感数据在线传输提供新的解决方案。
(3) 平台支持十万级用户高并发业务请求,可同时处理10组观测时长不小于10 min的数据,且能处理天线类型未知的数据。
(4) 平台数据解算精度较高,可为用户提供厘米至毫米级事后高精度定位服务,具体数值见表4。

表4 精度测试结果统计
4 结 语
针对事后高精度定位服务需求,本文提出了一种基于CORS的GNSS事后精密定位服务平台建设方法,并详细介绍了平台架构及关键技术。依托本文研究成果,湖南省已成功建设了基于HNCORS的GNSS事后精密定位服务平台——问北位置(www.sobds.com),有效解决了省内无移动通信信号覆盖时的高精度定位问题,同时满足用户高效率、低门槛的事后高精度(厘米级至毫米级)位置服务需求。本文研究成果可广泛应用于高精度工程控制网布设和工程变形监测,为高边坡、深基坑、高大桥梁堤坝、高层建筑等工程变形监测提供新的监测技术方案,有效拓展CORS高精度定位技术的深度应用服务,推进空间定位技术应用的大众化、产业化进程。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
太原科技大学学报(2019年3期)2019-08-05
铁道通信信号(2018年11期)2019-01-19
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
课堂内外(小学版)(2017年5期)2017-06-07
电子制作(2016年21期)2016-05-17
无线互联科技(2015年7期)2016-03-07