
汽车ADAS技术中的传感器应用
2018-08-28 03:15梁海洁
求知导刊 2018年13期
梁海洁
摘 要:文章介绍了汽车ADAS技术及其关键设备传感器的使用及特点,分析了传感器在ADAS技术中的重要作用及发展情况,对ADAS技术相关内容作了概述,并结合实际,对感应器在ADAS技术中的应用展开了研究。
关键词:ADAS;传感器;数据融合
中图分类号:U463.6 文献标识码:A
一、ADAS技术及其原理
先进驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其他用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况,对于最新的ADAS 技术来说,主动式干预也很常见。
ADAS系统工作原理如下图所示。

其工作原理是通过安装在汽车上的各类传感器采集路面信息,通过图像处理、图像分析等技术对路面情况进行分析,发现危险情况时会对驾驶员做出预警、介入车辆控制等。
ADAS系统的组成主要分成三个部分:传感器、ECU、执行器。
传感器主要是对行车的道路环境进行数据的采集。ECU就是电子控制单元,对传感器采集回来的数据进行分析处理,判断行车状况、道路状况。控制器判断出来有危险的状况,就向执行器输出控制信号,由执行器来完成相应的安全预防动作。
汽车高级辅助驾驶系统通常包括导航与实时交通系统TMC、电子警察系统ISA、自适应巡航ACC、车道偏移报警系统LDWS 、车道保持系统、碰撞避免或预碰撞系统等多种系统。
二、ADAS传感器及发展
ADAS高级辅助驾驶系统,简单来讲就是紧急情况下在驾驶员主观反应之前作出主动判断和预防措施,来达到预防和辅助的作用。据统计,ADAS可以将事故发生率降低70%。ADAS是怎么知道危險、预防危险的呢?这就不得不提到ADAS的实现高级辅助技能的核心部件:传感器。
对外部环境的探测,传感器大概是这样“进化”的:
超声波雷达:价格低廉,可探测2米(早期)到5米(当前)范围内的障碍物,车上用的一般是收发一体的探头,少的装4个在后保险杠,多的装12个(前后各6个)。主要能够实现泊车时的障碍物报警。应用5米探测范围的超声波雷达可以实现自动辅助泊车。但其响应速度慢,精度低,探测距离小。
毫米波雷达:根据频率分一般有24GHZ以及77GHZ的产品,77HZ频率主要为车载设备划分,因此越来越多的雷达会应用77GHZ频率。根据探测距离分有长距离250米,中距离150米以及短距离40~70米。雷达发射经过调制的无线电波,对金属有很好的探测,根据发出和收回的时间差可计算出目标距离,根据多普勒效应计算相对速度,这两项也是雷达算得最准的参数。但其对目标水平的探测精度较低且无法识别目标类型。最早的ACC就应用毫米波雷达,但只能工作在30千米/小时以上。
摄像头:有单目和双目摄像头之分,现在普遍应用的是单目摄像头,主要用于目标类型的判断,以及车道线识别。目前行业老大当属Mobileye,其EyeQ3是目前量产车中所配制的最高端的产品。少数车配以双目摄像头,其对目标的探测有深度信息,但由于成本高,且这些信息对比单目并未有质的飞跃很少被采用。主要能够实现车道偏离报警、车道保持、对行人和车辆的AEB等。其主要问题在于受环境影响非常大、雨雪雾沙尘霾都会使识别能力降低,抵抗强光的能力也不够强。对模棱两可的目标没法有效识别,对特殊目标也不容易正确分类等。
激光雷达:激光雷达并非最近才出现,很早以前就有车用激光雷达如ACC和AEB,但都是固定发出少线的类型,这里要说的是激光扫描雷达,包含机械的旋转相机构,比如Ibeo和Velodyne。固态雷达目前还在研发阶段,在车上应用尚需时日。激光雷达通过红外激光能够精确测距,Velodyne的FOV是360度,Ibeo差不多110度,法雷奥的量产产品在140度左右,垂直方向从4线到64线不等。激光扫描雷达是对周围障碍物位置形状最为精确的探测传感器,其数据包含探测到的点的距离和反射强度。反射强度还可以用于车道线的识别。其缺点是,Velodyne成本高,且一直不做目标识别算法。Ibeo的产品无论硬件还是算法仍不成熟,因此在应用上还存在诸多困难。
三、传感器数据融合
从当前的技术来看,每种传感器都有局限,有些是传感器本身,有些是算法还不够先进。因此,多传感器相备份和补充是必不可少的。
例如,对于一个目标,一辆车。用雷达取得的距离,相对速度,用摄像头识别类型和其与车道线位置关系,用激光识别其外形轮廓。构成一个目标完整的信息,之后再送入处理器运算。这就完成了多传感器数据融合的每一步,但实际会复杂得多,处理这些属性时的权重也需要根据不同情况判定。
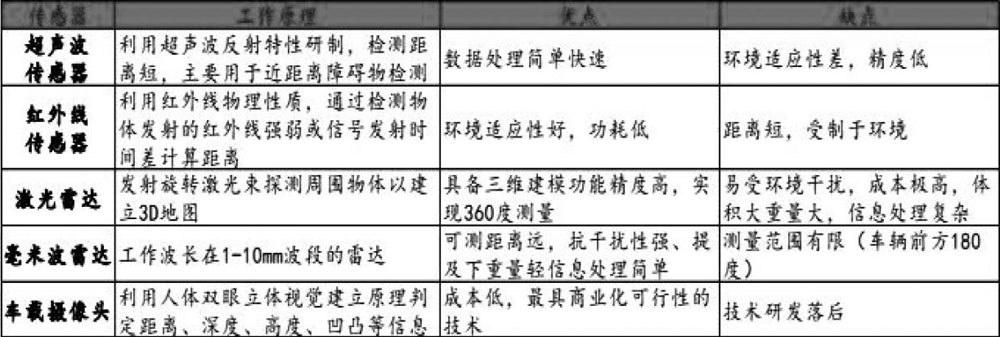
上表是一张对不同类型传感器工作原理及优缺点的介绍。通过对比,我们可以看到,不同传感器都有各自的优缺点,每一传感器有其各自的适用范围,每种方式的传感器都有其弱点。
ADAS利用高性能信号处理技术,并部署各种基于雷达和视觉的高级驾驶辅助系统。目前大多数先进驾驶辅助系统功能基本上是其自有独立系统,具有雷达、摄像头和超声波等最常用的传感,可以探测光、热、压力或其他用于监测汽车状态的变量。因此在未来,如果要实现全天候、高可靠性的应用,多传感器的融合将会是一种必然。
四、ADAS芯片技术
ADAS各项功能的实现,需要高性能的数据处理芯片支持。而随着技术的发展、功能的升级,传统车用芯片的性能已经无法满足庞大的计算量需求,特别是到无人驾驶阶段,这就要求芯片企业不断开发更高能效的车载芯片。现有的芯片方案主要有MCU、ARM、DSP、GPU、FPGA、ASIC等。
参考文献:
[1]张 翔.2014年汽车ADAS技术的最新进展[J].汽车电器,2014(8).
[2]孙 烨.我国汽车产业智能化再造——以ADAS为例[J].工业技术创新,2015(6).
猜你喜欢
中国电子报(2019年54期)2019-10-24
时代英语·高一(2019年1期)2019-03-13
中国计算机报(2018年30期)2018-11-12
中学物理·初中(2017年8期)2018-03-06
现代电子技术(2016年24期)2017-01-19
东方教育(2016年10期)2017-01-16
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年14期)2016-06-08
科技视界(2016年3期)2016-02-26
新高考·高一物理(2015年5期)2015-08-18
