基于云端控制的智能现场无人运货车设计
2018-08-27 10:24张粹玲罗卓童马永华林实宇夏林路
机电信息 2018年24期
张粹玲 罗卓童 马永华 林实宇 夏林路
(华北电力大学,北京102206)
0 引言
随着大数据与智能时代的到来,越来越多的科技致力于解放劳动力,而在一些生产现场又或者是生活区域,人为作业仍然是运送货物的主力军。这种传统的运送模式劳动强度大,消耗大量的人力、物力,甚至存在一定的危险性。
本款小车应用领域主要面向露天的现场,可用于电厂大型工业区、建筑施工区、集装箱仓库等。它可以通过实时反馈环境质量和现场情况以及判断现场是否遇到事故情况,在选择巡检模式后,多台设备配合作业,组成智能运输网络,完成现场的巡逻工作,效率高且不容易出现人为因素导致的失误。
1 总体设计
小车实现原理是通过摄像头和传感设备进行多数据采集,再由GPRS模块和工厂的控制中心互联,远程传输数据,最后云端完成对数据的控制与管理。总体设计由数据采集、数据传送、云端控制和货物抬升四部分组成,功能规划有数据采集和处理、电磁循迹导航、速度反馈控制、运输模式智能化、智能识别障碍物并自动处理、云端控制。小车的设计框图如图1所示。
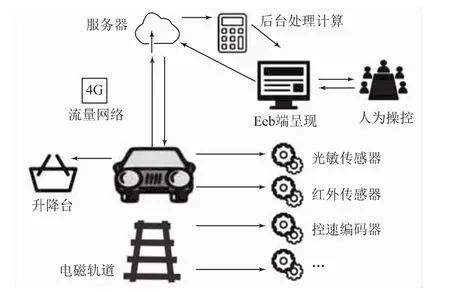
图1 设计电路
2 硬件电路
2.1 主控单元——单片机STM32F407
主控模块采用STM32F407,STM32系列是为要求高性能、低成本、低功耗的嵌入式应用专门设计的,而STM32F407是STM32系列性能最优越的一款,供电电压范围为3.3~4.4 V。其作用是控制传感器采集数据,并将数据发送到处理器上。
2.2 数据采集单元
在智能运货车开始作业后,无论是运输模式还是巡检模式,一方面对车子的速度、所承重量等数据进行定时检测和采集;另一方面,通过对环境数据的采集,以10 s为计时单位,反馈到后台数据库绘制成表或者曲线图,再通过Web端反馈给作业人员,以便其直观有效地判断车子附近的环境或者现场情况,从而及时加以处理。
采集的数据有小车的速度、六合一传感器的数据(其中包括温度、湿度、CO2浓度、TVOC、甲醛浓度、PM2.5细颗粒物)以及道路前方是否有障碍物等。其中,小车速度通过编码进行反馈并用FTM通道采集,编码器读取实际车轮转速,与设定速度进行比较,然后用PID算法进行调整,以使速度达到设定值。
小车所使用的六合一传感器工作电压为DC(5±0.2)V。由于诸多生产现场对环境有着严格的要求,因此多种参数的检测便于管理人员全方面地监控,检测参数的分辨率和测量范围都有详细的规定,通过RS485串口端接收和发送数据。
超声波模块和红外传感器用于对行驶路面信息进行检测,当在相邻时间点两次辨别前方有障碍物时,能够做到及时减速到停止。之后通过启动摄像头设备或通知附近现场人员进而辨别情况,能够在突发状况发生之后做到及时最优应对。
2.3 数据传送单元——GPRS模块
小车在现场工作,通过GPRS模块和控制中心互联,远程传输数据,实现现场与控制中心的通信。选用的GPRS是SIMCon提供的SIM800C系列模块,通过串口发送AT命令和数据实现通信功能,USB接口也可调试与软件升级。
2.4 货物运输单元——升降台
小车的货物运输部分安装有一个可自由抬升且挡板可拆卸的升降台,可实现多种模式的货物传送运输。由于使用场合的改变,小车增添升降台能够移动集装箱、中小汽车等,通过模式切换,做到运货方式多样化,即一车多用。
2.5 循迹单元——电磁轨道
由于众多生产现场的路径都有规划规定,故本运输小车采用电磁轨道循迹,检测磁场信号转换成电信号,并将其放大作为小车循迹的导航信号。小车可往返运行,不需要录入复杂交通规则,利用露天施工现场运行交通线路闭合的特点,通过电磁循迹,使小车按指定线路运行,不会给其他施工人员造成困扰。
3 软件设计
软件设计是为了实现数据上传云端以达到远程对现场情况实时监测的目的,其中单片机控速以及小车运行状态控制、数据传送和处理、Web云端监测部分都是通过软件实现的。
3.1 小车控速以及运行状态控制
通过单片机编程实现传感器和其他设备的动作,由编码器读取速度然后与设定速度进行比较,做到对所遇状况的感知、辨别、应对,包括速度读取、差速调整、PID参数设置。由于小车在转弯时左右轮速度不同,故需分别进行参数调整。
3.2 数据传送和处理
将硬件传感器的数据以10 s一次的频率通过串口发送到服务器端,导入数据库,后台从服务器提出数据库,将数据库里的数据自动生成表,且将表链接到前端做到实时呈现。
如图2所示,以CO2的检测为例,由生成表可以得到浓度实时值以及做出趋势预测,以供管理人员查看。
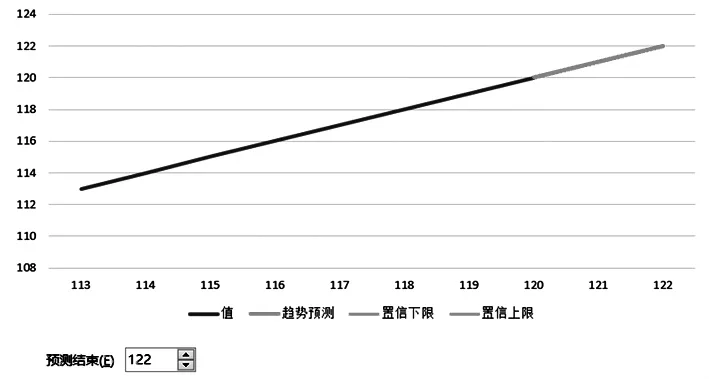
图2 CO2指数绘表分析
3.3 Web前端开发
结合HTML和CSS,完成Web云端界面的设计,分为七个版块——首页、监测预警、日常监管、应急救援、安全知识库、实景检测、办公辅助。在前端开发中,完成资料的整理,且增添链接和数据导入等串口,方便处理完的数据进行传送呈现。
4 结语
本文介绍的小车由单片机、传感模块、GPRS模块进行数据采集处理传送,云端进行数据实时监控和管理,可实现环境识别分析从而进行巡检以及智能控速、电磁循迹、智能避障,摆脱了现场的限制。
经过系统运行测试,在对运行参数进行设定后,小车可自主地启动运行,并完成一系列数据上传、路径识别、货物运输功能。后台人员也可通过简洁的界面监控小车行驶现场的状态,并在小车遇到障碍物反馈时及时作出反应,操作简便,节省了大量的人力、物力。
因为在当前的无人驾驶作业中,针对现场作业的研究成果很少,但无人驾驶是一个潮流趋势,且使现场作业高效化也是当下的改进点,所以,智能现场无人运货车具有广阔的发展空间。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
华人时刊(2022年5期)2022-06-05
装备制造技术(2020年11期)2021-01-26
现代装饰(2020年5期)2020-05-30
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
电子制作(2017年1期)2017-05-17
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05