基于视觉导向的机械手设计与研究
2018-08-27 10:24曹宇杰
机电信息 2018年24期
曹宇杰
(上海电力学院,上海200090)
0 引言
随着科技的不断发展应用,各种可以代替人工的机械设备进入到工业生产和家庭生活中,机械手作为代替人工操作、提高生产效率的典型作品,已经广泛应用于各种工业生产。现在市面上主要的机械手从结构上大体可以划分为串联机械手和并联机械手两种,而串联机械手从结构上来讲十分简单,相对运动范围也比较广;而并联机械手则有着准度较高,速度较快的特点,适用于医疗等方面。
1 Delta结构概述
在机器人技术日渐成熟的今天,各种机械架构层出不穷,而Delta结构就是并联架构中可以实现在空间内三自由移动的技术之一。相对于其他架构来说Delta结构通过运动学的逆运算配合机器各部件的结构计算出三个电机独自运作的角度、速度等参数,由此可见,这种并联的结构拥有并行操作、速度快的优势,同时它因为有三个电机所以承载能力也比较强,抓取的精度也比较高,所以运用Delta技术可以在工作中实现较为精准的操作,目前其已经广泛应用于食品工艺、药品制造、包装和电子元件制作的各个生产环节,通过并行操作准确、快速地实现抓取、摆放等操作。
2 机械手的设计方案
笔者经过对各项技术的综合分析,最后决定用Delta技术设计一套可以实现智能拾取功能的并联结构机械手,利用视觉导向技术让机械手拥有自主识别功能,初步计划用高清摄像机获取机械手运动轨迹中的实时图像并上传到中控系统,由中控系统完成相应的识别操作并进行定位,最后发送指令给机械手完成最终的抓取和释放操作。在机械手的设计中主要系统由以下四方面实现:执行模块、中控系统、设备驱动和视觉传感系统,所以暂定需要光源、视频采集卡、摄像头、PC工作站和图像处理软件几项来进行测试和模拟。
机械手的模型以现有的Delta直线型机械手为主,在三个塔柱上安装滑车,滑车的动力通过步进电机拉动传送带提供,而动平台的从动臂杆需要保持相对平行,用来保证动平台的运动是平行的。定位组件采用现有的VBAI组件,这个组件可实现快速处理目标图像的功能,通过处理目标的灰度信息来进行距离的厘定,在数据库中匹配相似的模板,之后通过建立坐标轴和以坐标等为目标进行三维的定位操作。抓取放置等操作的实现通过夹取装置来配合中控系统下发的各项操作命令根据单片机中提前设置的运动轨迹完成。在后续的设计中,夹取装置还可以通过在中控系统的数据库内对不同目标进行优先级的编排,根据系统的设定按照次序进行抓取操作。
3 机械手运动的分析
机械手运动的简易示意图如图1所示。
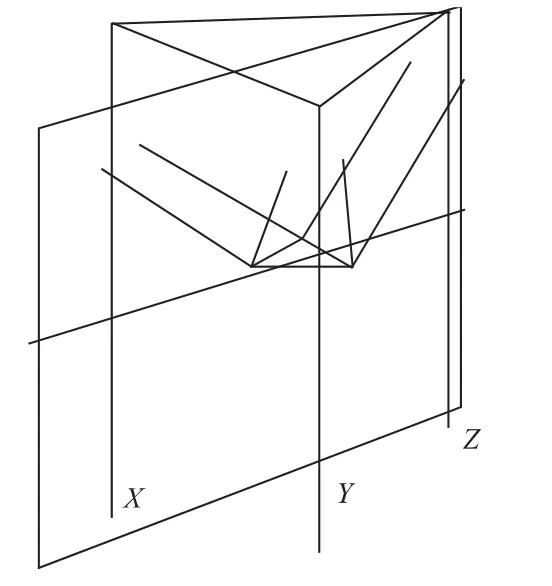
图1 机械手运动示意图
由于Delta结构三个从动臂的相对受力和运动情况相同,所以在分析中只考虑Z轴即可。由于图中各推杆的长度是固定不变的,假设推杆的长度为C,那么轴坐标A,Z轴到动平台中心的距离B可以稳定成一个直角三角形。因为C2=A2+B2,假设滑车运动了a,那么动平台的中心就会运动b,此时可以得到C2=(A-a)2+(B+b)2,具体的变化过程如图2所示。
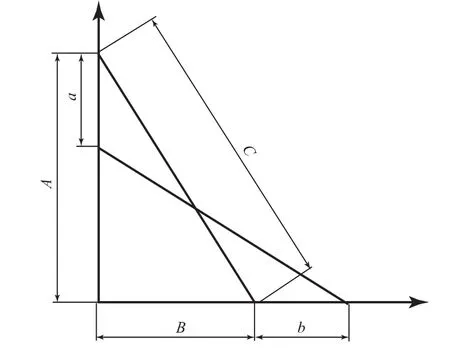
图2 以Z轴为例的摄影图
4 视觉系统的相关设计
在建立好三维坐标后,需要视觉系统把观察到的坐标通过传感器传到控制器中获取拾取和释放操作的命令,其大致工作流程如下:首先需要建立一个摄像机的模型,对应坐标系中几个观察点与现实中观察点的关系,方便图像采集和定位操作,然后进行图像采集并传送给中控系统;其次要进行图像的处理操作,通过摄像头获得的图像解析出相对应的三维坐标,同时完成对进行操作的目标进行识别和判断;最后对机械发出控制的命令,通过控制器给出释放和夹取操作信号,同时对处理结果进行实时反馈,如果结果有误差及时进行修正处理。
5 控制系统的相关设计
在对机械手的控制系统进行设计时,要用到计算机作为控制和处理中心,将处理步骤等烧制到单片机上,在单片机中对步进电机、视觉系统、伺服电机和电源系统进行数据的处理。并给出控制命令的操作。
视觉系统由机械手上的摄像头和采集卡,计算机上的图形处理软件、上位机等组成,这样可对采集到的图像进行快速处理和识别,完成将三维物体迅速定位到坐标系中的操作。此时中控系统通过计算结果对三个步进电机进行控制操作,在控制中实时获取视觉系统的信息来判断操作是否有误,对后续的处理和计算操作进行更正。而最终机械手的实现部分由夹取装置来完成,通过中控系统给出的各种运动参数来控制角度和方向。另外,中控系统还负责电源的控制和照明的提供,以防环境亮度较低时不能准确计算出相对坐标。
6 工作站系统数据库的相关设计
在机械手设计初步完成后,要在工作站完成相应的软件和数据库设计,实现通过终端上的应用程序发出指令,中控系统接到指令后安排机械手完成相应操作的功能。
在工作站数据库的设计中,首先分为以下几部分来进行表结构的设计:
第一,建立用来存储视觉传感系统传回的影像、照片信息的存储空间,为视觉导向系统进行分析打好基础;
第二,建立虚拟坐标系各参数的存储表,将不同计算公式、数据字典设置好,一旦系统完成了对图像的分析操作,可以及时建立数据库完成相应计算,有利于中控系统对目标进行快速定位,为之后下发抓取、释放命令做好铺垫;
第三,建立下发命令的记录表,这个表可记录由工作站下发的所有命令,同时将命令转换为坐标系中需要达成的参数,这样中控系统就做到了有据可依,也可根据这张表查询对机械手下达命令的历史记录,一旦测试发现问题可以进行快速定位;
第四,建立参数设置备份表,在测试机械手性能时可能会有一些失误操作,通过给机械手下达错误的指令、错误的换算关系、错误的目标识别维度,导致其不能正常工作,一旦出现这些问题,利用这张表可以实现数据的回滚操作,恢复工作站上一次为机械手创建的正确配置,这样就可以在测试中不断完善机械手的功能。
7 结语
笔者基于以上方案进行设计与开发,制作出了基于视觉导向的机械手样机,并对样机的各项性能进行了测试,结果表明,样机抓取速度较快,最快可达285 mm/s,最大加速度可达220 mm/s2,灰度测试正常,坐标轴各方向定位精度平均为0.8 mm,能较准确地识别物体,识别率为95%。从样机测试来看,机械手基本可以实现目标,但想要应用在工业生产中,还需要提高速度和识别度,这就需要在后期的研发中优化和更新图像处理算法,同时不断完善单片机程序,以达到优化作业路径、加快夹取速度的目的。
猜你喜欢
今日农业(2022年16期)2022-11-09
家庭影院技术(2021年3期)2021-05-21
装备制造技术(2020年4期)2020-12-25
铁道通信信号(2020年5期)2020-09-21
电脑报(2020年32期)2020-09-06
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
铁道通信信号(2016年10期)2016-06-01
通信电源技术(2016年1期)2016-04-16
铁路通信信号工程技术(2014年5期)2014-02-28