
基于MS60的BIM施工放样精度研究
2018-08-25 06:18黄恒刘国栋冉东涂礼操曾有财蒲小聪
重庆建筑 2018年8期
黄恒,刘国栋,冉东,涂礼操,曾有财,蒲小聪
(1重庆交通大学土木工程学院,重庆 400074;2中国五冶集团有限公司,四川成都 610063)
0 引言
进入21世纪初,BIM不再仅仅是狭义的两层含义,即建筑信息模型 (Building Information Model)[1]和建筑信息建模(Building Information Modeling)[2],并且已经成为实现建筑全生命周期管理BLM(Building Lifecycle Management)的核心技术[3],包含新的工程建设管理理念及其相关的技术、方法、软件和平台等[4]。目前,国内建筑领域对BIM技术的主要应用是BIM施工放样,通过MS60测量机器人可以把三维模型与施工现场结合起来[5]。
传统施工放样是用全站仪进行施工放样[6],由于放样过程中至少需要两个人,并且受现场和人为因素影响较大,导致放样精度不高、效率低等问题。本文首先将BIM施工放样流程与传统的全站仪施工放样流程进行对比[7],然后通过中国五冶公司在重庆市仙桃数据谷异形建筑BIM施工放样项目中的具体实验案例,把基于MS60测量机器人的BIM施工放样与基于TS-802N全站仪的施工放样进行精度对比分析,验证了BIM施工放样的技术优势,同时也总结了BIM施工放样存在的不足[8]。
1 传统施工放样原理
施工放样中放样点坐标计算的原理是:根据已知测站点坐标O(x0,y0,h0)以及与放样点P(xi,yi,hi)间的距离Si、天顶距αi和水平方向值βi,计算得到放样点的坐标值。公式如下:
xi=x0+Sisinαicosβi
yi=y0+Sisinαisinβi
hi=h0+Sicosβi
原理示意图如图1所示。
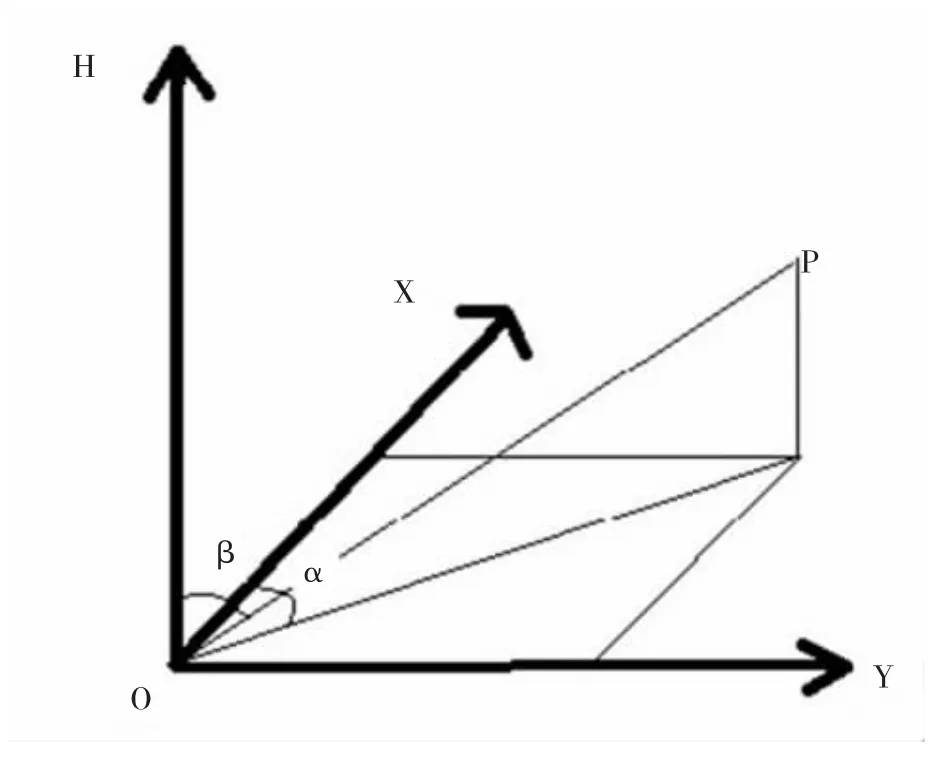
图1 施工放样原理示意图
2 BIM施工放样方法
基于MS60测量机器人进行BIM施工放样是目前BIM技术结合测绘领域的主要应用之一,具体放样流程包括数据预处理、提取放样点、数据导入测量机器人、设定测站和放样五部分。
(1)数据预处理:通常选用Revit软件进行BIM模型处理,因为BIM模型的数据量通常很大,所以需要进行测区的模型提取处理以减少数据量。通过隐藏模型中不需要的部分,然后将模型对象提取出来并导出为dxf格式文件,用来作为移动端上的参考底图使用。
(2)提取放样点:在Revit软件中安装Leica Building Link插件进行放样点的选取工作。在模型中选取所有放样点并将其导出为xml数据格式文件,选取的放样点如图2所示。
图2 模型上选取的放样点示意图
(3)数据导入MS60:首次使用MS60时要先在仪器中安装Leica Capativate软件,进行放样工作前需要在MS60中新建一个项目,然后在项目中依次导入上一步中准备的dxf格式文件和xml格式文件。操作界面如图3所示。
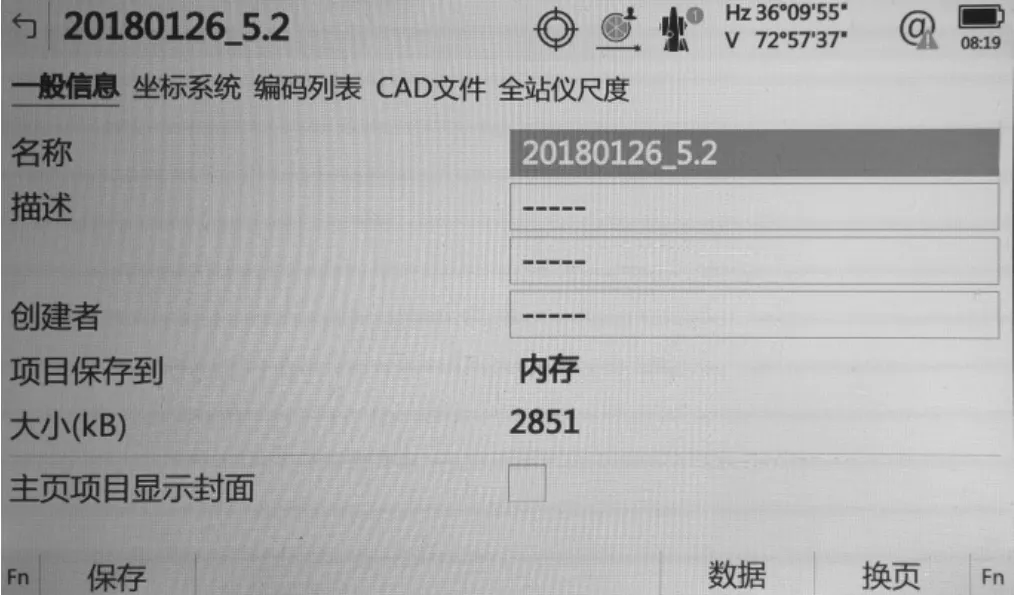
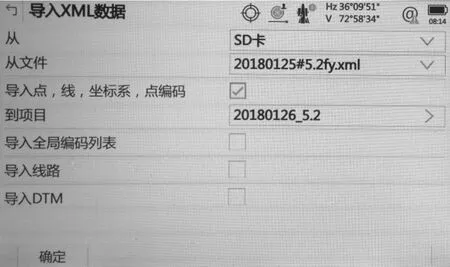
图3 在MS60中导入.dxf文件和导入.xml文件示意图
(4)设定测站:使用MS60设定测站的方法同全站仪设定测站基本一样,区别在于精平操作过程中MS60是根据仪器界面的动态提示进行,能够快速准确的完成精平操作。如图4所示。
(5)放样:利用CS20手簿可以实现一个人的BIM施工放样操作。首先在手簿界面上选择BIM模型中的放样点,MS60测量机器人能够对放样点进行自动定位;然后依靠MS60的自动识别棱镜功能瞄准棱镜,进行测距操作,在手簿界面会动态提示棱镜的偏移方向和距离;最后根据MS60的棱镜自动追踪功能调整棱镜位置,直到寻找到测距结果满足限差的放样点为止。放样过程中手簿界面如图5所示。

图4 MS60精平提示界面
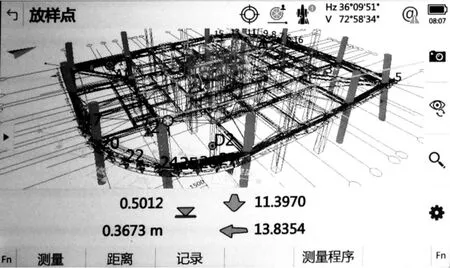
图5 放样过程中的手簿界面示意图
3 案例分析
重庆仙桃数据谷规划建筑面积40.4万m2,本文选择仙桃数据谷数据库工程中商务办公楼二期一标段五号楼二层外轮廓作为研究对象,如图6所示。实验案例采用基于TS-802N全站仪进行传统施工放样,用基于MS60测量机器人进行BIM施工放样,并且对放样结果进行精度对比分析。
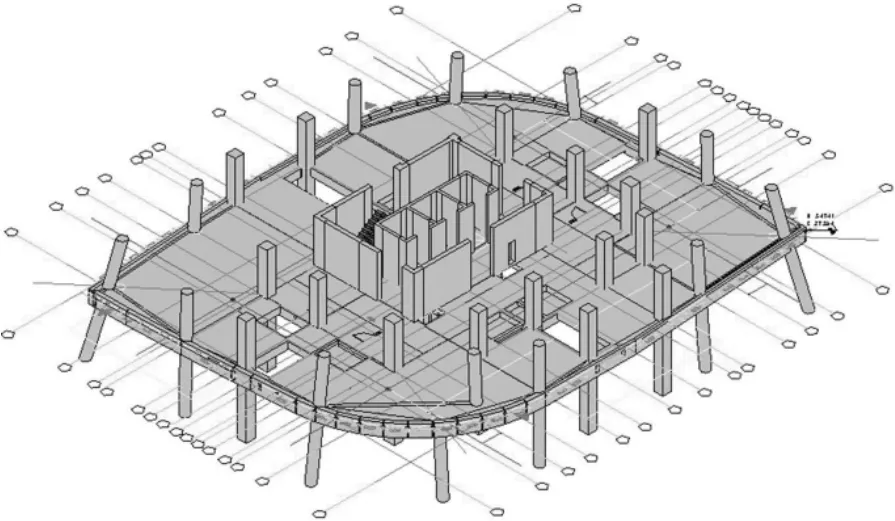
图6 重庆仙桃国际数据谷建设项目中实验研究对象示意图
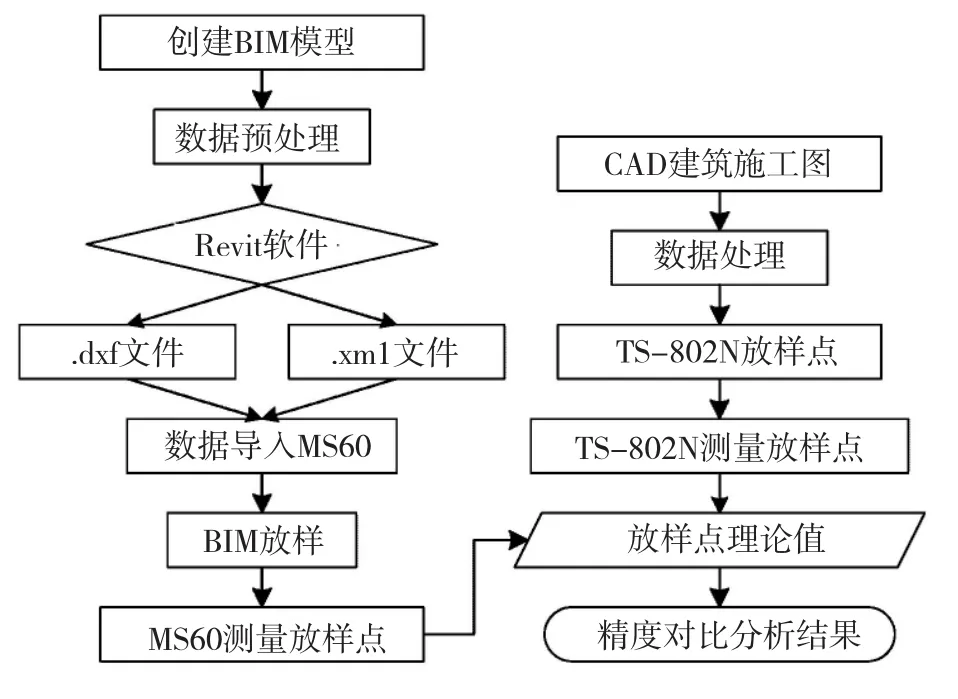
图7 实验技术路线示意图
实验的技术路线如图7所示。
实验采用独立坐标系,用(x0,y0,h0)表示放样点的原始坐标,用(x1,y1,h1)表示用MS60采集的放样点坐标,用(x2,y2,h2)表示用TS-802N采集的放样点坐标,如下表1所示为p1至p10点的坐标数据。
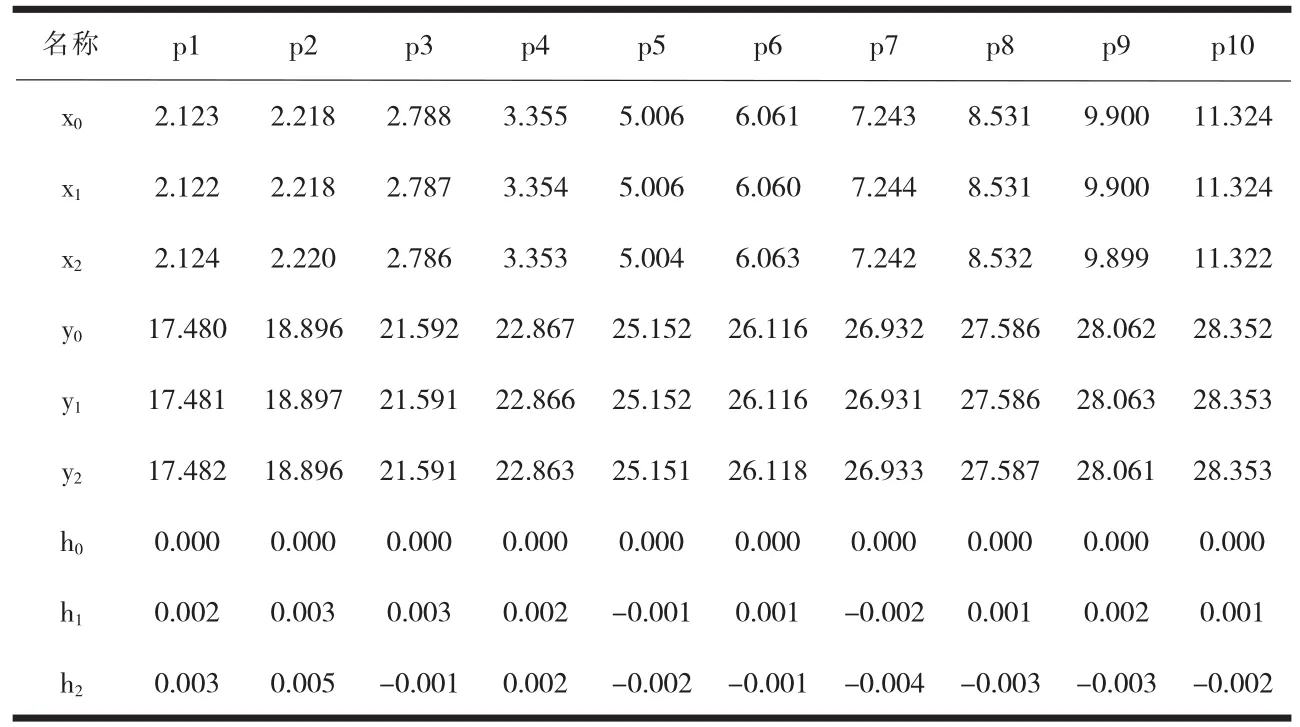
表1 放样点坐标数据
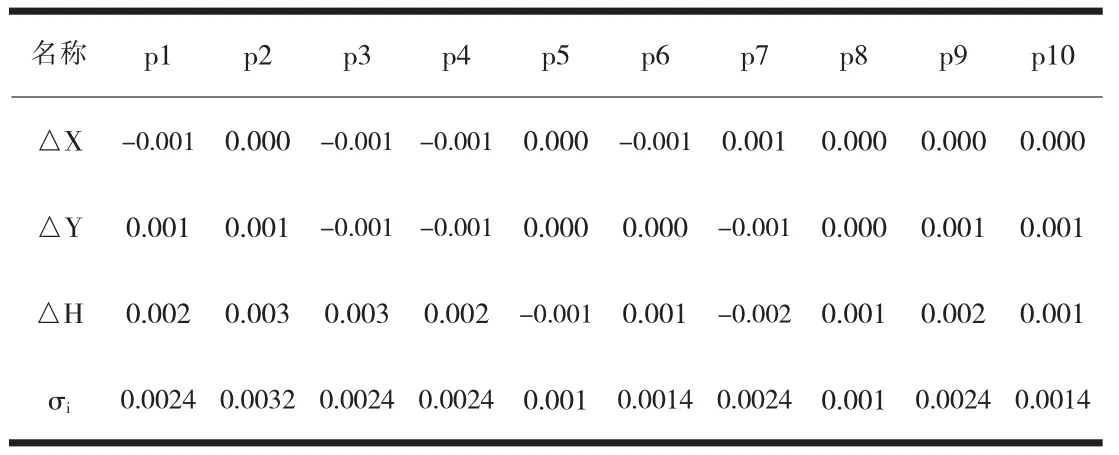
表2 MS60放样点偏差量
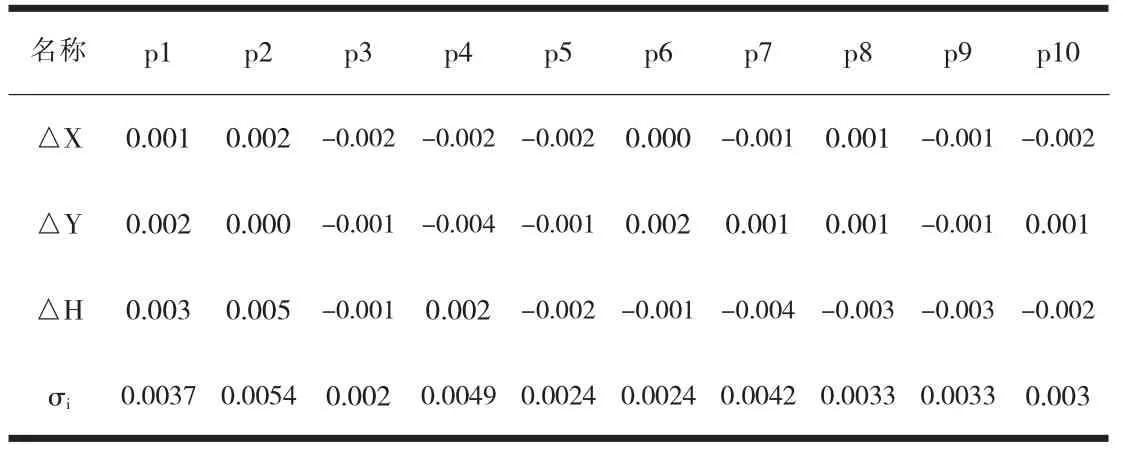
表3 TS-802N放样点偏差量
用△X代表X方向上的距离偏量,△Y代表Y方向上的距离偏量,△H代表H方向上的距离偏量,σi代表测量中误差,(Xi,Yi,Hi)代表测量结果,(Xj,Yj,Hj)代表放样点设计坐标,有如下数学模型:
△X=Xi-Xj
△Y=Yi-Yj
△H=Hi-Hj

MS60放样点测量结果对比理论值偏差量如表2所示。
TS-802N全站仪放样点测量结果对比理论值偏差量如表3所示。
由表2和表3可以得知基于MS60的BIM施工放样精度比基于TS-802N的传统施工放样的精度高,MS60测量机器人进行BIM施工放样的精度能够达到1mm,而TS-802N全站仪进行传统施工放样的精度只能达到2mm。
4 结论和建议
本文主要是将BIM施工放样流程与传统施工放样流程作对比,并且用基于徕卡MS60测量机器人的BIM施工放样精度与基于TS-802N全站仪的传统施工放样精度作对比分析。得出了BIM施工放样的优点在于:①BIM施工放样的效率高于传统施工放样;②BIM施工放样操作比传统全站仪施工放样操作简单;③BIM施工放样能够实现可视化操作;④BIM施工放样的自动化程度高,可以实现棱镜的自动追踪和自动瞄准放样点操作;⑤基于MS60进行BIM施工放样的精度能够达到1mm,优于传统全站仪TS-802N进行施工放样的2mm。BIM施工放样存在的不足在于:①技术性更强,不仅需要借助专业软件处理数据,还需要借助测量机器人进行施工放样操作;②仪器成本高,传统全站仪的市场价格要远远低于测量机器人的市场价格。BIM施工放样在建筑领域具有广泛的应用前景,针对国内进行BIM施工放样过程中存在的不足,我们需要制定统一的BIM标准来进行规范管理,开发新的仪器设备用来降低成本,从而推动实现BIM技术在各领域带来革命性的变化。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
湖北植保(2022年4期)2022-08-23
土壤(2021年1期)2021-03-23
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
少儿美术(快乐历史地理)(2020年4期)2020-02-24
工程与建设(2019年3期)2019-10-10
学苑创造·A版(2019年4期)2019-05-10
土壤学报(2017年5期)2017-11-01
福建农业学报(2016年6期)2016-11-01
