
基于姿态随动技术的直升机低高度测量
2018-08-24 07:49谷士
计算机测量与控制 2018年8期
, ,谷士
(中国飞行试验研究院,西安 710089)
0 引言
离地高度是直升机悬停科目试飞与小速度科目试飞中的关键参数。直升机的高度信息通常由气压式高度传感器和无线电高度表获取。由于直升机地面效应,使得气压式高度测量的测量误差会因高度的降低而增大[1]。加速度计能反映高度方向的速度变化,短时间内通过对加速度两次积分可得到高度信息,但长时间误差会积累。无线电高度测量主要用于直升机低高度时的高度信息测量。由于其自身的原因,易受周围电磁环境和飞机姿态、风速、风向等诸多因此的干扰,从而无法进一步提高精度和可靠性[2]。因此,直升机低高度精准测量是一个困扰直升机试飞研究的技术难题。
随着激光技术的发展,激光测距逐渐成为一种先进的测量手段,并开始应用于直升机低高度测量中。但是在具体实施过程中由于直升机机动中飞行姿态变化剧烈,经常导致激光接收装置无法接收到反射回来的激光信号而导致数据失效。通过机载姿态跟随技术研究,可以克服克服直升机机动状态下姿态变化引起的激光测量误差与失效,而且可由机载综合采集系统将低高度数据融合,实现低高度数据的遥测接收、存储和监控[3]。从而实现在每一科研架次中的起飞和降落的时候完成若干高度的悬停飞行,可以极大扩充数据样本,从而获取比较准确的试验结论。
1 低高度测量的特点与关键技术指标
直升机激光测高是一种激光测距技术,是指利用机载的激光测高仪对地面目标进行高度测量,高度数据结合载体的姿态信息(由惯性测量系统IMU 获取),经事后地面数据处理后可以得到较为准确的低高度数据[4]。因此直升机激光测高已在国内外的飞行试验中得到了广泛的应用[5]。
通常激光测高装置一般采用固定安装底座,在激光测高工作状态下受直升机姿态的限制,当直升机的俯仰角和横滚角超过5o时激光接收器因无法接收到激光反射信号而报故障,影响了激光测高的有效性和精度。随着直升机悬停性能和小速度机动飞行试飞科目的重要性日益受到重视,常用的激光测高装置已不能满足日益增长的试飞测试需求[6]。
研究姿态跟随激光测高技术,通过随动控制算法实时调整激光测距仪发射器和接收器的对地角度,确保激光装置始终铅垂向地,消除直升机姿态限制,从而实现直升机机动试飞情况下低高度的高精度测量。
主要技术指标:
1)姿态跟踪范围:
横滚角-30~30°;
俯仰角-30~30°。
2)姿态跟踪精度:
横滚角 <1.5°;
俯仰角 <1.5°。
3)跟踪速度与角加速度范围:
X轴向,横滚,最大转速15°/s,最大加速度30°/s2;
Y轴向,俯仰,最大转速15°/s,最大加速度30°/s2。
4)测高范围:0.5~300 m;
测量精度:<2 cm;
响应速度:≯0.2 s。
2 基于姿态随动的低高度测量系统设计
2.1 设计原则
依据直升机低高度测试要求,充分考虑直升机试飞特点前提下设计满足试飞需求的测试方案。该设计方案是基于增加相对飞机载体的姿态随动系统平台,通过随动电机使激光发射器和接收器的安装平台可跟随直升机姿态进行实时调整,确保激光装置始终铅垂向地,从而实现直升机机动试飞状态下低高度的高精度测量。
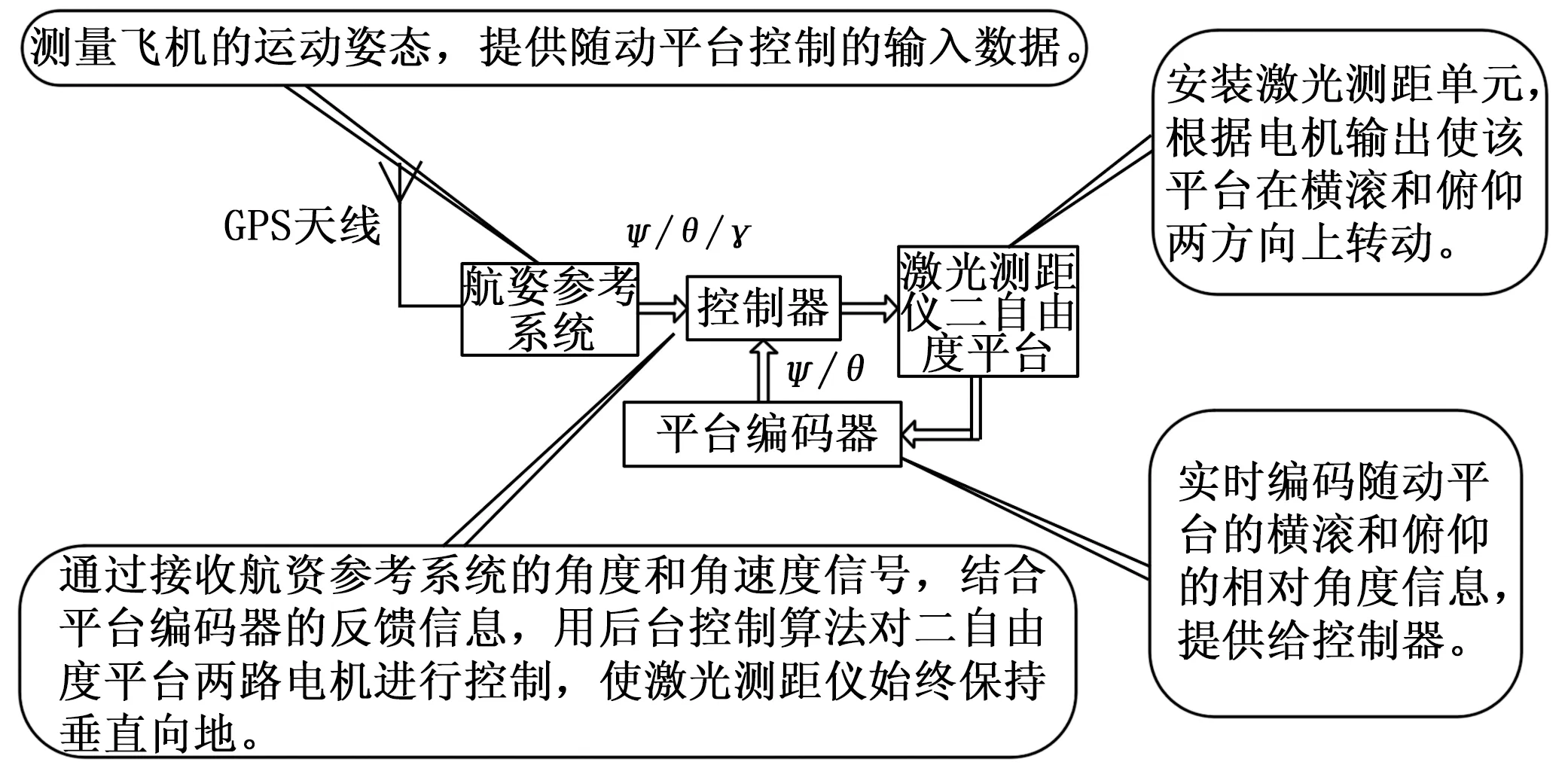
图1 姿态随动激光测高系统结构框图
各系统组成部分功能如下:
1)航姿参考系统:用于测量飞机的运动姿态,提供随动平台控制的输入数据。可抽引机载陀螺信号(横滚角和俯仰角)或加装IMU作为航姿参考系统。
2)控制器:通过接收航姿参考系统的角度和角速度信号,结合平台编码器的反馈信息,利用PID算法对二自由度平台两路电机进行控制,使激光测距仪始终保持垂直向地。
3)二自由度随动平台:用于安装激光测距单元,可利用电机使该平台在横滚和俯仰两方向上转动,调整其对地指向。
4)平台编码器:实时测量出随动平台的横滚和俯仰的相对角度信息,提供给控制器。
2.2 直升机姿态跟随控制算法研究
姿态输出信号作为基准输入中央控制器,由控制器解析出俯仰角及横滚角信号,然后将所需的运动量分别送达两轴电机的驱动电路,驱动电机工作,从而带动二自由度平台达到铅垂向地的状态[7]。二自由度平台的每个运动轴向上分别装有绝对值编码器,可反映平台的实时运动状态,为控制器提供负反馈,修正控制角度。在二自由度平台达到预定测量位置后,控制器读取激光测距仪的测量信号,并将该数据以RS422总线形式输出。控制系统的结构框图如图2所示。
当然,这仅是新媒体平台的传播内容之一,大量精心录制的与会员单位相关的公益性、商业性宣传短片,也是日常传播的重要内容。在一个制作间里,我们观看了其近期录制、已在电视台播放的一部短片:上海印刷2017,该片通过形象的画面、简练的语言、丰富的信息,生动总结了2017年上海印刷业新成就、新变化、新挑战,帮助从业者有效掌握信息,把握行业发展方向;也帮助更多的业外人士建立起对印刷的整体印象。很多时候,误解都是不了解或不充分所致。
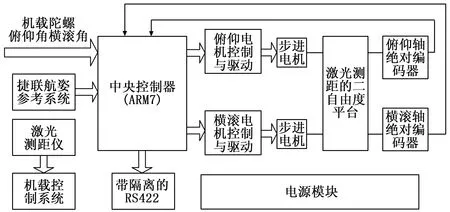
图2 控制系统框图
控制系统工作时对接收到来自IMU的RS232信号进行解析,得到飞行姿态信息,然后生成运动平台转动所需的信息来控制运动平台与飞机的飞行姿态保持相反的运动,使得激光测高仪发出的测量激光始终保持与地面垂直来实现高度的精确测量。最终将测量到的高度信息将以RS422信号形式通过FTI信号接口传递给机上测量记录系统[8]。
伺服系统可由直流电机、控制器、减速器及位置编码器组成(见图3),滚转和俯仰采取一样的结构。对于滚转和俯仰轴稳定能力的技术要求一致,考虑到俯仰为外回路,转动惯量等变量远大于滚转的内回路,系统按俯仰通道的最大需求进行选择。
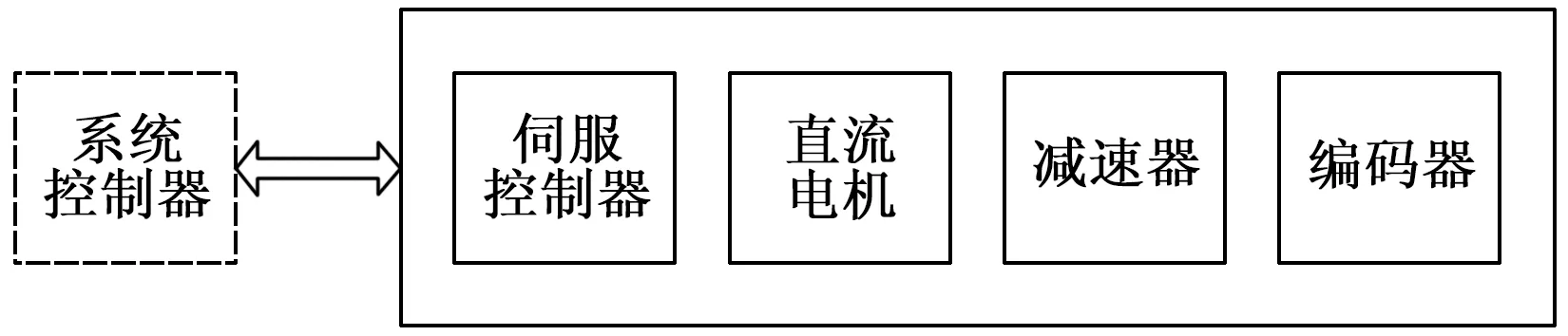
图3 伺服系统结构框图
伺服电机安装有位置和速度传感器,姿态伺服系统的仿真结构如图4所示。本项目采用姿态+测速反馈方式,数字舵机(含减速机构)及测速反馈相对固定,通过选择合适的KP、KI、KD增益,保证直升机机载激光高度测量的良好跟踪性能。姿态跟踪系统响应从零开始到达稳态的时间约为0.24 s,无静态误差。系统具有较高的响应速度,具有远大于跟踪15°/s角速率变化的能力,从研究上能够满足1.5°跟踪精度和5 s稳定时间的要求[9]。
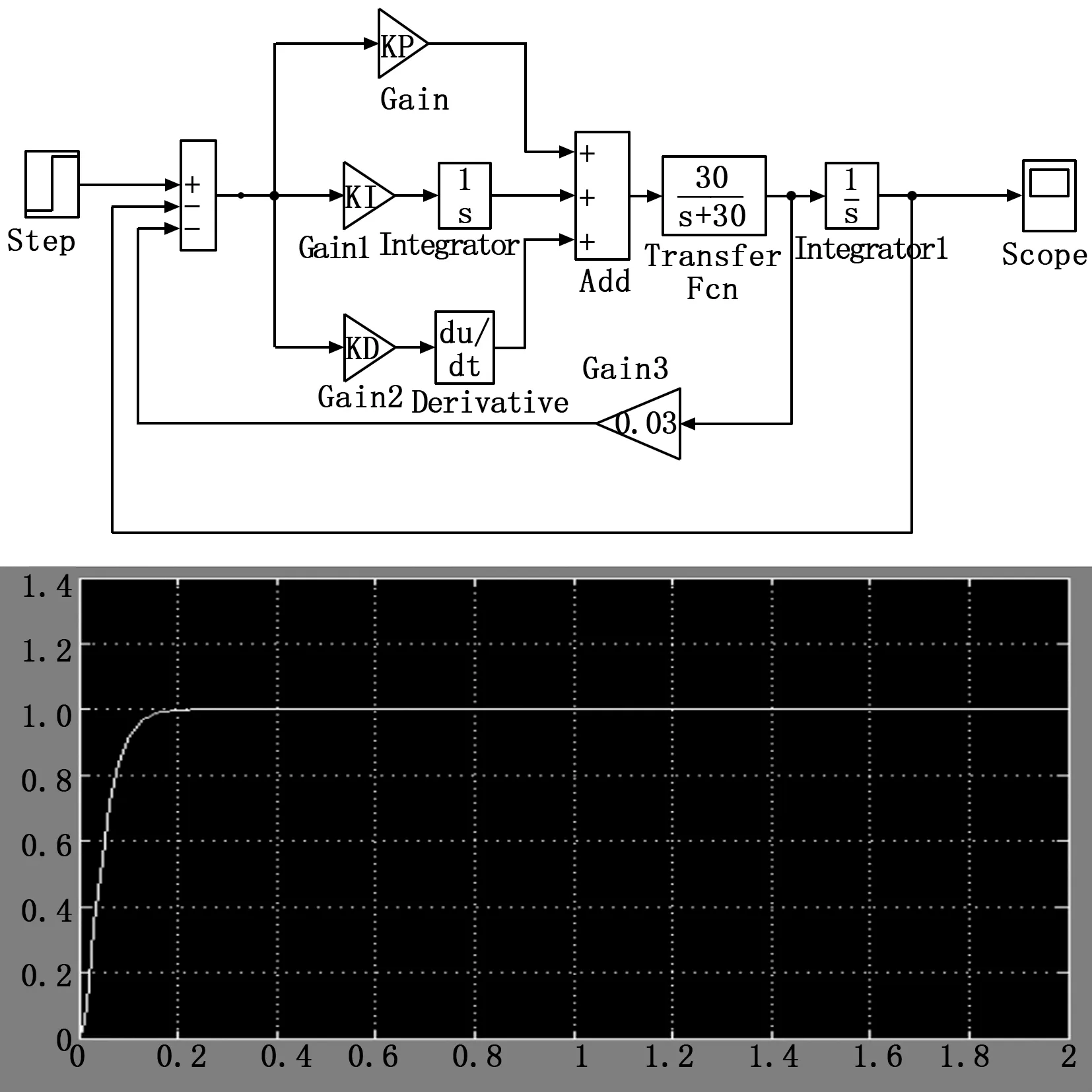
图4 姿态伺服系统仿真结构图与单位阶跃响应
2.3 姿态随动运动平台结构研究
运动平台用于安装激光测距单元,为了抵消直升机姿态变化对平台的影响,平台应在横滚和俯仰两个轴向上分别转动。建立平台的坐标系时应与飞机的坐标系保持一致,俯仰轴应平行于机轴方向,横滚轴应在水平面内与俯仰轴保持垂直[10]。姿态跟踪范围为横滚-30~+30°、俯仰-30~+30°。
两方向随动平台的运动机构及转动时对空间的要求决定其无法直接在直升机上安装,为此研究专用安装支架。通过加装航姿参考系统作为辅助数据,可减轻转动平台重量[11]。平台分为横滚台和俯仰台,每个轴向分别通过一个步进电机及其配套的减速装置控制,转动轴上安装绝对值光电编码器[12]。采用框架嵌套结构,外层框架可在横滚方向上转动,为两个电机、减速机构及控制电路提供了安装空间,内层平台安装在外层框架的中轴线上,可独立在俯仰方向上转动,为激光测距单元提供安装空间[13]。运动平台结构原理图见图5。
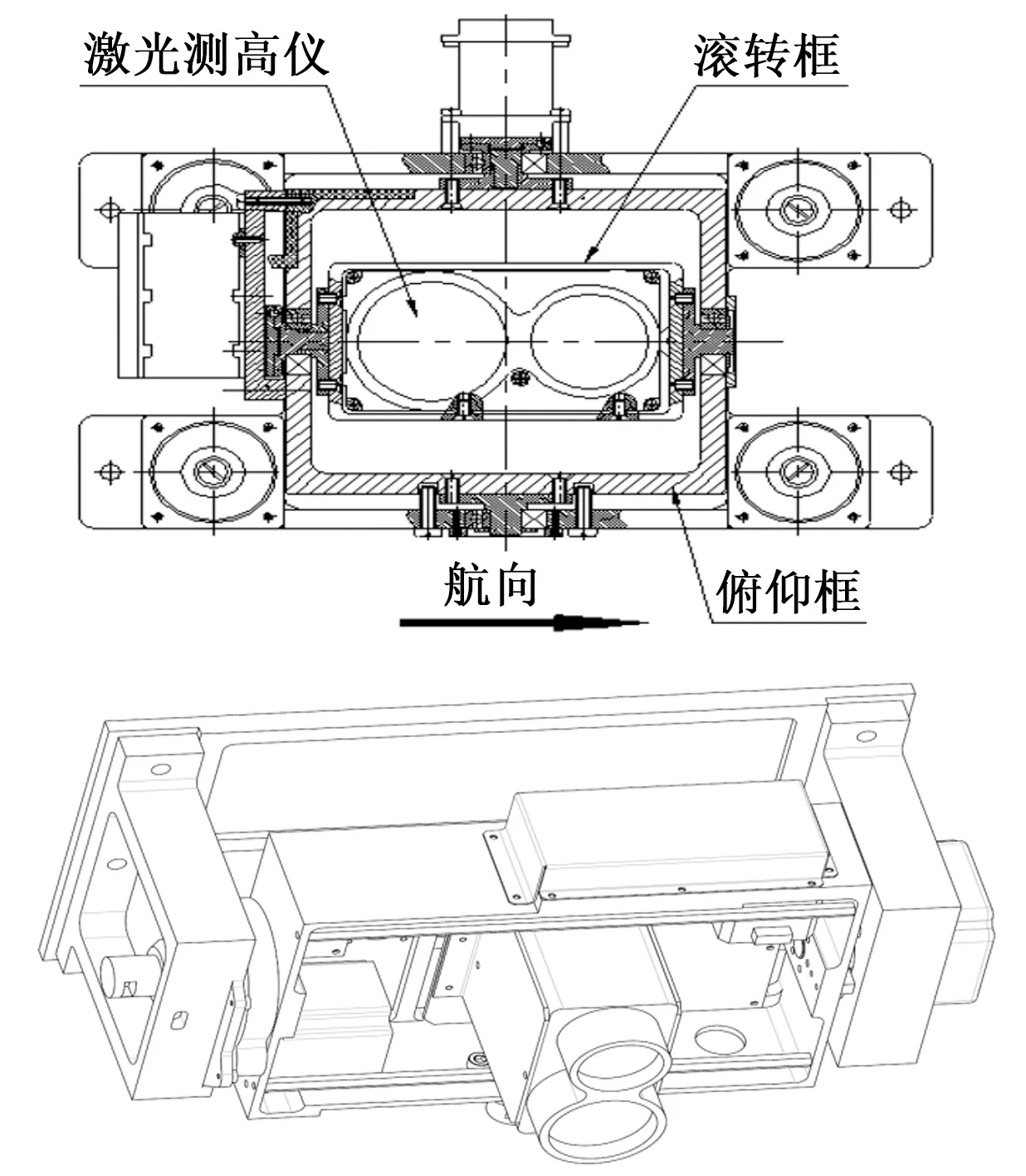
图5 二自由度运动平台结构图
随动控制系统又名伺服驱动系统,是一种以机械位置或角度作为控制对象的自动控制系统,使用的驱动电机具有响应速度快、定位准确、转动惯量较大等特点。步进电机是将电脉冲信号转换成相应的角位移或线位移的控制电动机。基于步进电机的位置随动系统可以很好地实现全方位监控的目的。
2.3.1 横滚和俯仰平台驱动
横滚轴平台所需要的驱动力矩为:
T=T0+T1+Tk
(3)
式中,T0为惯性力矩;T1为静力矩;Tk为摩擦力矩。
模型中,激光测距单元选用LDM301,136×57×104 mm(L×W×H),其重量为0.8 kg,平台采用铝板,连接采用法兰连接,总质量约为1.429 kg,在俯仰方向上的转动惯量为2.9×10-3kg·m2。考虑到装配中使用紧固件,横滚轴平台质量取1.5 kg,转动惯量取3.0×10-3kg·m2[14]。横滚向的最大角加速度为30°/s2。
横滚轴平台所需要的驱动力矩为T=T0+T1+TK≈0.775 N*m
在2倍裕量的情况下[15],横滚驱动机构的扭矩需2.27 N*m。
同理,俯仰平台的驱动力矩为T=T0+T1+TK≈1.07 N*m
在2倍裕量的情况下,俯仰驱动系统的扭矩需3.04 N*m。
因此使用最大扭矩为10 N*m的电机将能够满足需求。
平台系统模型如图6、图7所示。
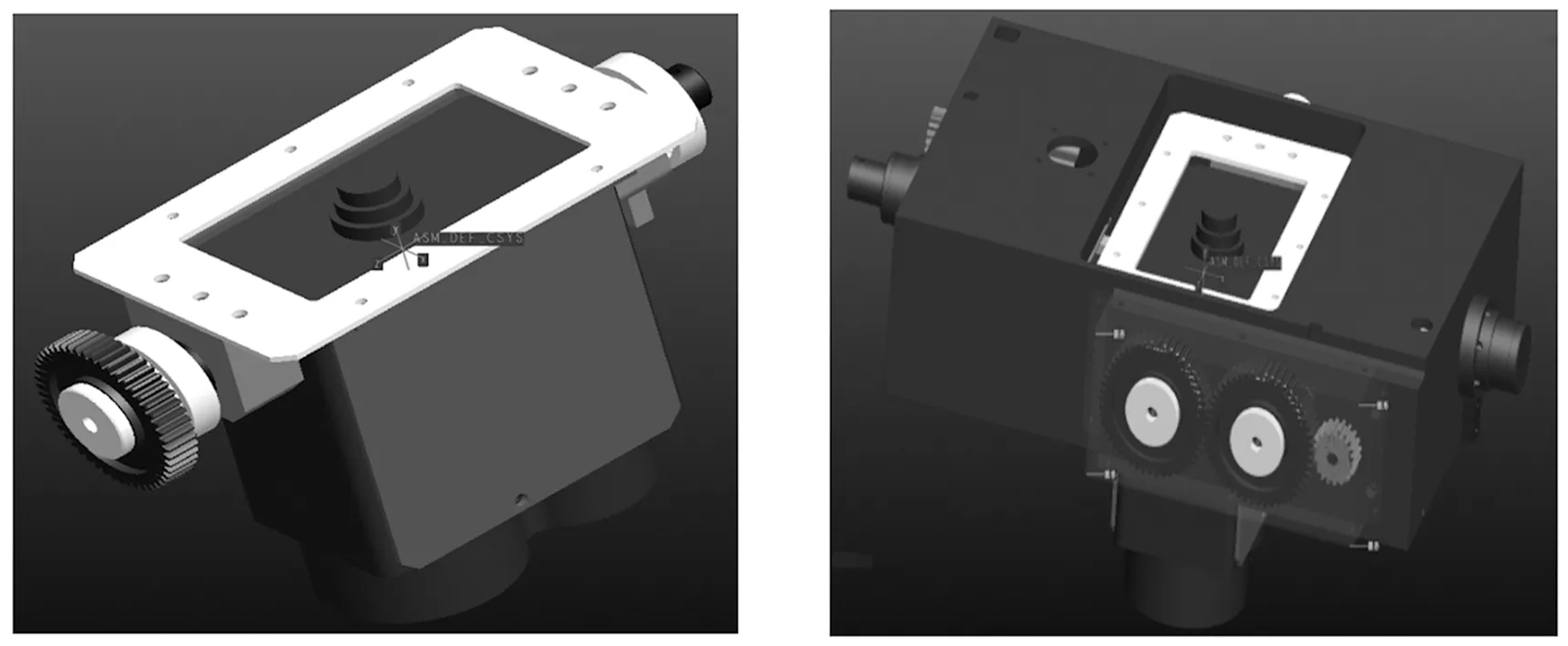
图6 横滚和俯仰平台建模
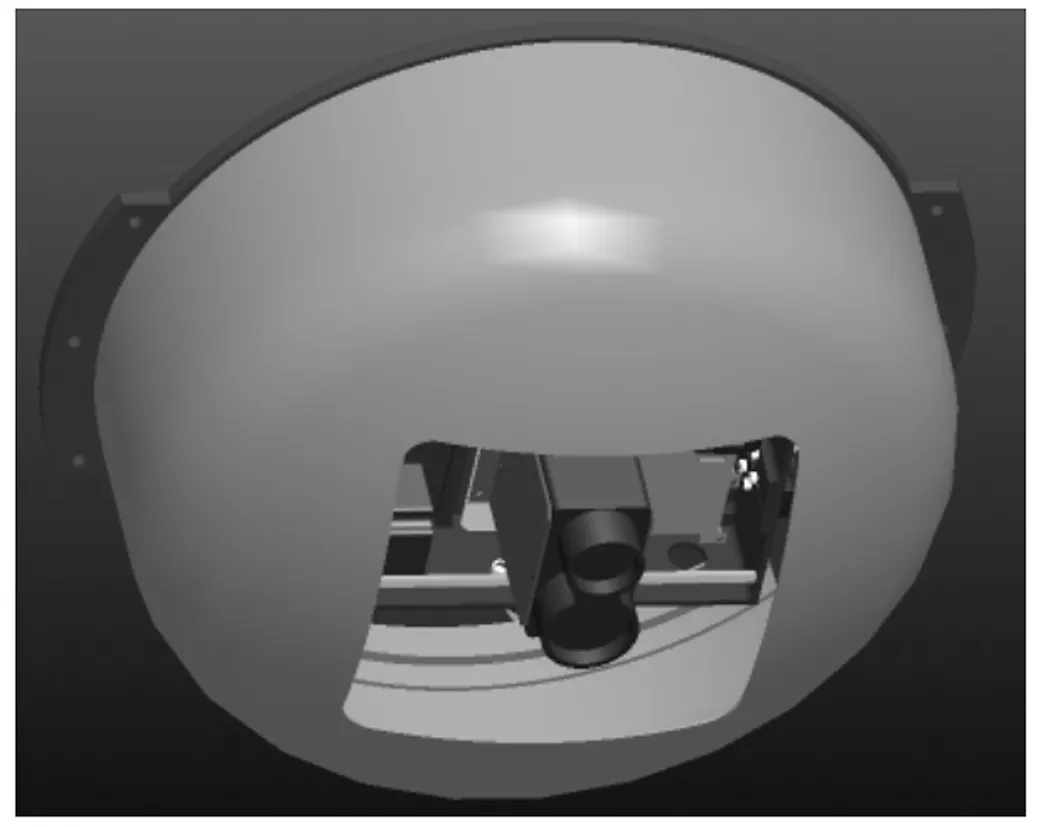
图7 系统数模图
2.3.2 控制程序流程研究
首先完成各端口的初始化,包括接收姿态信息的IMU端口(RS232,19200,n,8,1)、发送给机载测试系统的FTI端口(RS422,19200,n,8,1)、接收激光测距数据的LDM端口(RS422,19200,n,8,1)、与滚转和俯仰伺服舵机的ACT端口(RS485,19200,n,8,1)初始化。正常后则进入由基准定时中断控制的任务循环流程,根据姿态信息驱动舵机进行姿态稳定(跟踪),同时把测高信息、跟踪姿态及状态信息发送给机载测试系统[16]。
系统主程序流程,基准定时中断服务子程序,串口中断服务子程序见图8。
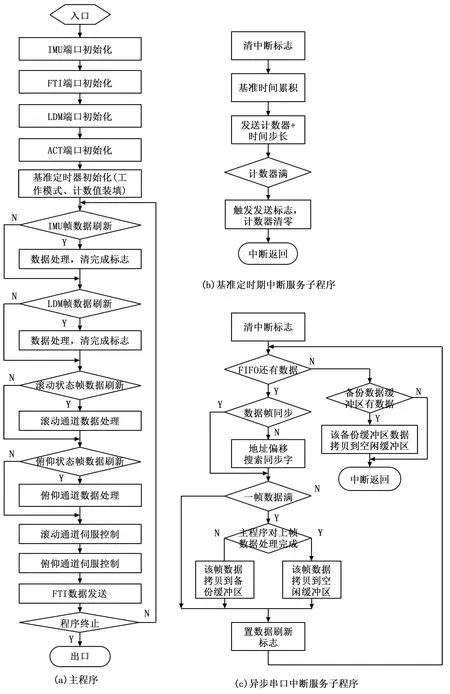
图8 控制程序流程
3 实验与验证
项目设计完成进行直升机姿态跟随激光高度测量技术和飞机姿态随动控制算法的验证,为激光测距系统研制工作提供技术依据。包括:随动系统的响应速度验证、测试精度以及IMU修正设备安装误差算法等。因为控制率的响应仿真结果、测试结果的理论精度都只是理论计算的值,必须通过实际的地面验证工作来验证仿真结果的真确性。同时,验证误差补偿算法的正确性[17]。
上位机使用一台PC,完成载机姿态信息的模拟和发送,同时接收实验台返回的测试信息,通过曲线和文本方式显示,并记录相关数据,便于试验的实时监控和数据的事后分析[18]。分别进行以下测试:
1)极性测试:设置斜坡(Ramp)信号类型(缺省设置速度15°/s,最大幅值30°),正向和反向信号各加入一次,检查算法的姿态跟踪情况。平台运动的方向应该与加入信号的方向相反。
2)姿态跟踪范围测试:选择斜坡(Ramp)信号类型,设置25°、30°、35°的最大范围,正反向信号各加入一次,检查算法的跟踪情况,纪录数据和分析,确定是否达到最大±30°的要求(系统软件限幅为±32°)。
3)姿态跟踪动态性能测试:选择阶跃(Step)信号类型(缺省设置幅值10°),正反向信号各加入一次[19],检查算法的动态响应过程,并纪录数据和分析。系统从零到稳态值的时间应小于0.3 s,稳定时间应小于5 s,系统稳态误差应小于1.5°。
4)姿态角速跟踪误差测试:选择斜坡(Ramp)信号类型,设置25°/s恒定速度,最大幅值为30°。检查算法的姿态跟踪响应过程,并纪录数据和分析。响应过程的姿态跟踪误差应<1.5°。
5)姿态角速度及角加速度跟踪误差测试:选择自定义(User)信号类型,最大角加速度为30°/s2,最大角速度为25°/s,最大角度为30°。检查算法的姿态跟踪响应过程,并纪录数据和分析。响应过程的姿态跟踪误差应<1.5°。
4 结束语
通过研究直升机姿态跟随控制算法,控制随动平台跟随飞机的姿态调整激光测距仪的角度,保证激光测距仪始终垂向地面,解决姿态对激光测高数据精度的影响,测量精度高、获取数据快、应用范围广,测量精度理论值达到20 mm;通过数据融合技术汇入机载测试系统,既可以进行实时监控又便于事后数据处理。该技术的成功应用开拓了直升机低高度测量技术的新领域,将极大地提高试飞效率,对促进直升机试飞水平的提升具有重要作用。
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
学生天地(2020年3期)2020-08-25
表面工程与再制造(2019年1期)2019-05-11
汽车观察(2018年9期)2018-10-23
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
儿童故事画报·智力大王(2016年3期)2016-05-05
诗选刊(2015年4期)2015-10-26
海峡姐妹(2015年3期)2015-02-27
第二课堂(小学版)(2009年9期)2009-11-13
