
基于足底压力和关节运动信息的步态检测系统设计
2018-08-24 07:49,,
计算机测量与控制 2018年8期
,,
(1.桂林电子科技大学,广西 桂林 541004; 2.桂林电子科技大学 信息科技学院,广西 桂林 541004;3.深圳市老年医学研究所,广东 深圳 518000)
0 引言
随着中国社会的发展与进步,人口老龄化已经成为了一个不可忽视的社会性问题。在老年人常见的疾病之中,中风有着极高的发病率。同时,其留下残疾性后遗症的几率也高达75%[1]。幸存的患者还常常面临着偏瘫等后遗症,如下肢运动功能残疾等。偏瘫步态是脑卒中致残最常见的临床表现之一,对患者步态进行检测分析,是治疗师评估患者病情,制定康复计划的重要依据。
目前,采集患者步态信息的主要手段为视频图像分析及足底压力测量。足底压力的测量技术主要分为测力板、测力台、测力鞋垫等[2]。测力板及测力台体积较大,使用不便,且测试范围受限,而测力鞋垫因为有着体积小,安装操作方便且受试者活动范围大的特点,可以很好克服测力板及测力台方式的不足[3-4]。
近年来,融合视频图像处理及足底压力测量等多方面技术的三维步态分析系统已经投入实际使用。但其高昂的使用成本,较大的占地面积,较高的操作技术门槛使得在使用中仍然受到较大的限制[5-7]。
针对目前步态采集系统存在的问题,设计了一种融合惯性传感器、薄膜压力传感器及无线传输技术的患者步态检测系统,利用放置于鞋垫内的薄膜传感器采集患者足底压力信息,惯性传感器采集患者关节运动角度变化信息,并结合无线传输技术,使系统具有较好的舒适性、便携性、可扩展性[8-9]。
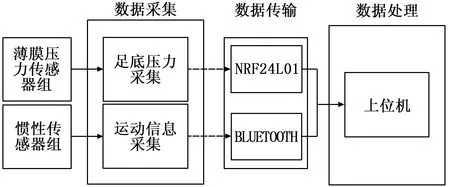
图1 步态检测系统总体框图
1 系统结构设计
步态检测系统总体分为数据采集、数据传输、数据处理部分。系统总体框图如图1所示。数据采集部分用于采集薄膜压力传感器及惯性传感器的信息,数据采集部分包括采集电路、单片机及无线收发模块和惯性传感器模块。数据采集部分将所采集的薄膜压力传感器及惯性传感器信息通过无线传输发送至数据传输部分。数据传输部分分为NRF24L01通信模块及蓝牙通信模块,负责将所采集的压力信息及运动角度信息传输至数据处理部分。足底压力信息通过NRF24L01通信模块进行传输,惯性传感器采集的关节运动信息通过蓝牙通信模块进行传输。数据处理部分负责数据信息的处理及显示。
2 硬件电路设计
2.1 足底压力采集模块
足底压力采集模块包括薄膜传感器、信号检测电路、微控制器。压力采集模块整体如图2所示。薄膜传感器用于采集足底压力信息,通过信号检测电路将压力信号进行放大,经由微控制器AD转换模块实现数模转换,并利用微控制器与NRF24L01模块进行通信。NRF24L01模块通过串口将数据传输至上位机,由上位机进行相应的处理。
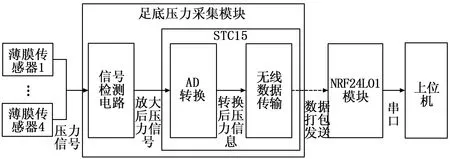
图2 压力采集模块整体框图
测力鞋垫所选用的薄膜压力传感器是南京丹陌电子科技有限公司的RFP 薄膜压力传感器。RFP 薄膜压力传感器为圆形,直径21 mm,长度约5 cm。该薄膜压力式传感器体积小巧,柔软度高,具有较好的线性度和精度(±3%)。在实际应用中,该传感器的外围驱动电路较为简单,可以很好地应用于足底压力的测量。RFP 薄膜压力传感器为压阻式传感器,薄膜传感器表面压力的变化会引起传感器电阻值相应的变化,通过测量压力传感器电阻的变化情况可以获取传感器表面压力值的变化信息。
2.1.1 薄膜传感器信号检测电路设计
薄膜传感器可以将传感器表面压力的变化转化为电阻值的变化,薄膜传感器检测电路用于实现薄膜传感器的电阻值变化转换为可用于AD转换的电压信号。信号检测电路采用运放构成的放大电路实现薄膜传感器信号转换,并将电信号传送至微控制器以进行电压信号的AD转换。
根据人体正常行走时,足底压力主要分布在前脚掌内侧、大脚趾、脚后跟、脚弓外侧等处的分布特点[10],选定在足底4个主要受力点采集压力信息,分别是脚跟部,第二、四节跖骨以及第五趾骨处。信号检测电路用于实现四路并行足底压力信息的采集,单侧足底压力需要采集四路压力信号,则双脚一共需要采集八路的压力信号。由于各路压力信号的检测使用相同的硬件电路,下面针对单路电路的设计进行介绍。单路信号检测电路原理如图3所示。
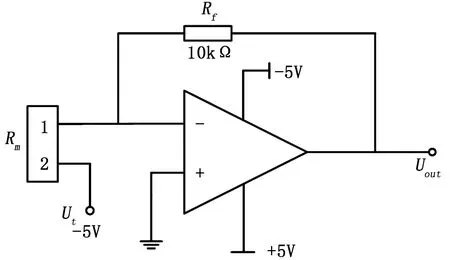
图3 检测电路原理图
根据运算放大器的原理可得到传感器电阻与电压之间的函数关系:
(1)
其中:Uout是输出的电压信号,Ut是外界参考电压,Rf是参考电阻,选用1 kΩ或10 kΩ电阻,Rm是薄膜压力传感器的电阻。实际应用中,选择Ut为-5 V,且Rm电阻大于Rf电阻。因此,信号检测电路的输出电压在+5 V以下,满足单片机AD转换的电压要求。
2.1.2 AD转换及数据传输
足底压力采集模块利用微控制器的A/D 转换模块实现薄膜传感器电信号的模数转换。STC15是一款低成本、低功耗和高效能的微控制器,内部集成了8个10位的AD转换器,具有丰富的接口资源,适合应用于便携式设备中。使用STC15系列微控制器作为足底压力采集模块的AD转换单元,其采样精度可达到10位,采样频率最大达到300 KHz,能够满足系统需求。同时,完成压力信息的模数转换后,还可以利用STC15单片机较丰富的接口资源与无线通信模块进行数据传输。
NRF24L01无线传输模块是一种高速、便捷的无线传输模块,其有着使用简单、功耗低、传输速度快的特点,对于便携设备是一种很好的选择。NRF24L01无线传输模块最大通信距离可达到100米,可接网络节点数最多可达6个,传输速率为2 Mbps,能够满足系统传输的实时性要求和可扩展性的要求。
同时,NRF24L01模块还结合了增强型Shock BurstTM技术,外部单片机或控制器可以直接通过SPI接口实现对NRF24L01内部参数的设置以及数据交换。NRF24L01无线传输一次最多可发送32字节数据,且内部硬件自动对传输数据进行相应的数据打包处理,如添加数据协议头、数据尾以及CRC校验等,实际使用中较为方便。并且,NRF24L01还提供了开发封装库,开发较为简单,大大降低了无线传输网络的开发难度。因此,选择NRF24L01无线模块不仅可以满足系统传输数据的需要,还可以帮助系统快速搭建,缩短开发周期。
2.2 运动信息采集系统
运动信息采集模块包括7个WB惯性传感器及蓝牙集线器。运动信息采集模块整体框图如图4所示。7个WB惯性传感器安装在人体的特定位置,在人体运动时,采集、记录人体下肢各关节运动的关节角度。由于WB惯性传感器自带蓝牙通讯,因此,利用蓝牙集线器接收7个惯性传感器的数据。蓝牙集线器通过串口与上位机进行通信。
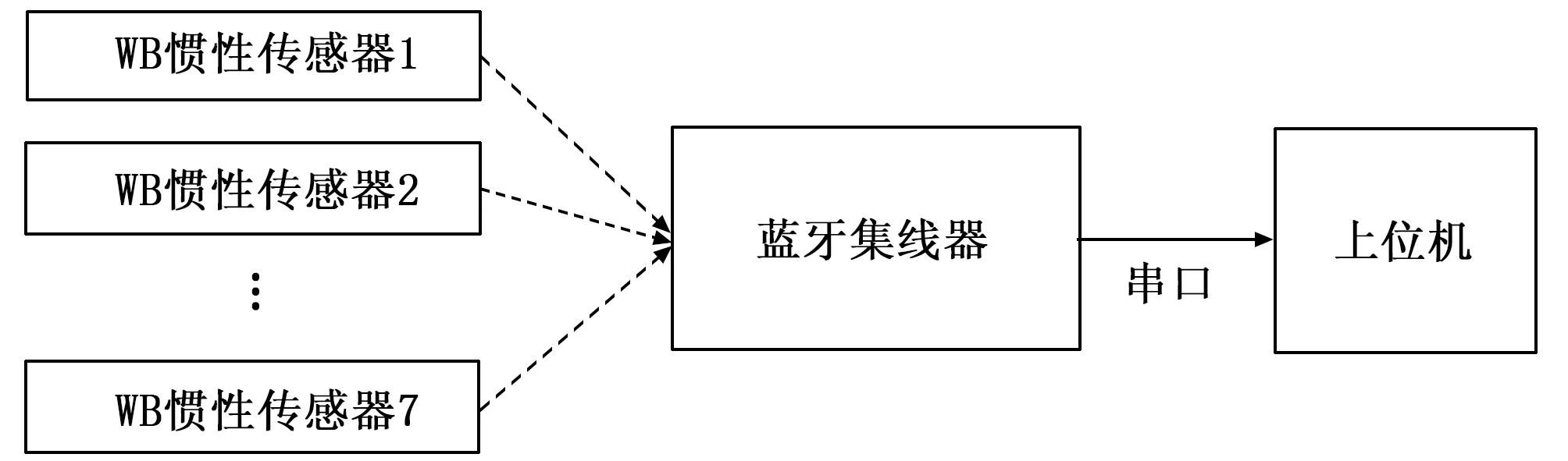
图4 运动信息采集系统框图
WB传感器,又称为LPMS-B(life performance research motion Sensor) 九轴数据无线传输型姿势传感器,WB具有体积小、易穿戴、精度高的特点。该传感器具有3轴加速度计,3轴陀螺仪,3轴地磁传感器,内部硬件通过卡尔曼滤波器算法对姿态信息进行高精度计算,直接输出传感器运动姿态的四元数信息,系统采样频率高达500 Hz,内部集成了蓝牙通信模块,无线蓝牙通讯方式实现数据传输。
WB传感器的主要作用是对人体运动姿态信息进行采集,得出人体下肢运动信息。将WB传感器安装在人体特定部位,可以获取到该部位的运动姿态四元数数据,并利用四元数转换欧拉角算法,可以方便地得到人体下肢关节的运动角度。
在康复医学上,髋关节的运动能力是由大腿相于腰部的运动姿态来进行评定的;大腿膝关节的运动能力是由小腿相对于大腿的运动姿态来进行评定的;踝关节的运动能力是由足部相对于小腿的运动姿态来进行评定的。为获取人体下肢髋关节、膝关节、踝关节的运动角度,需分别采集腰部、大腿部、小腿部、脚部的运动姿态信息。因此,WB传感器安装部位选择为患者腰部、大腿部,小腿部,脚部。
2.3 四元数转换算法
四元数这一概念是由爱尔兰数学家哈密顿于1843年提出的。四元数由一个实数单位1和3个虚数单位i,j,k组成的含有4个元的数:
Q=[w(x,y,z)]=w+xi+yi+zk=w+v
式中,w是标量,v是矢量。
欧拉证明了一个旋转序列等价于单个旋转。因此三维坐标系总的任意角位移都能表示为绕单一轴的单一旋转。当一个方位用这种形式来描述时称作轴——角描述法。设为旋转轴,定义其为单位长度,为绕轴旋转的量,则轴——角对定义了一个角位移:绕指定的轴旋转角。
四元数能被解释为角位移的轴——角对方式[11]。
(2)
表示旋转的四元数,可转换为矩阵得:
(3)
然后转换为ZYX顺序的欧拉角得:
(4)
(5)
(6)
其中:Mij表示M矩阵第i行第j列的元素,EulerX,Eulery,EulerZ是以ZYX顺序绕坐标轴的的角度。
通过惯性传感器获取四元数信息,可以方便地通过转换算法,得到人体关节运动的角度信息。
3 系统软件设计
步态检测系统需要同时接收足底压力采集模块及运动信息采集模块的数据,并对这些数据进行相应的处理,如存储、显示、算法实现等。步态检测系统软件分为足底压力采集软件和上位机软件。
足底压力采集软件负责足底压力信息的采集、传输。上位机软件负责接收、处理足底压力及关节运动信息,并显示及存储。另外,运动信息采集模块通过蓝牙集线器与上位机直接通信,运动信息采集模块的信息传输由蓝牙集线器完成,因此,关节运动信息的数据处理在上位机进行。
3.1 足底压力采集软件设计
鞋垫上的薄膜传感器的压力变化经过放大电路后,由STC15单片机实现AD转换及数字滤波,并通过NRF24L01无线通信模块传输至上位机数据处理部分进行数据处理。足底压力采集软件用于控制STC15单片机实现采集数据的AD转换、处理以及数据传输,足底压力采集处理流程如图5所示。
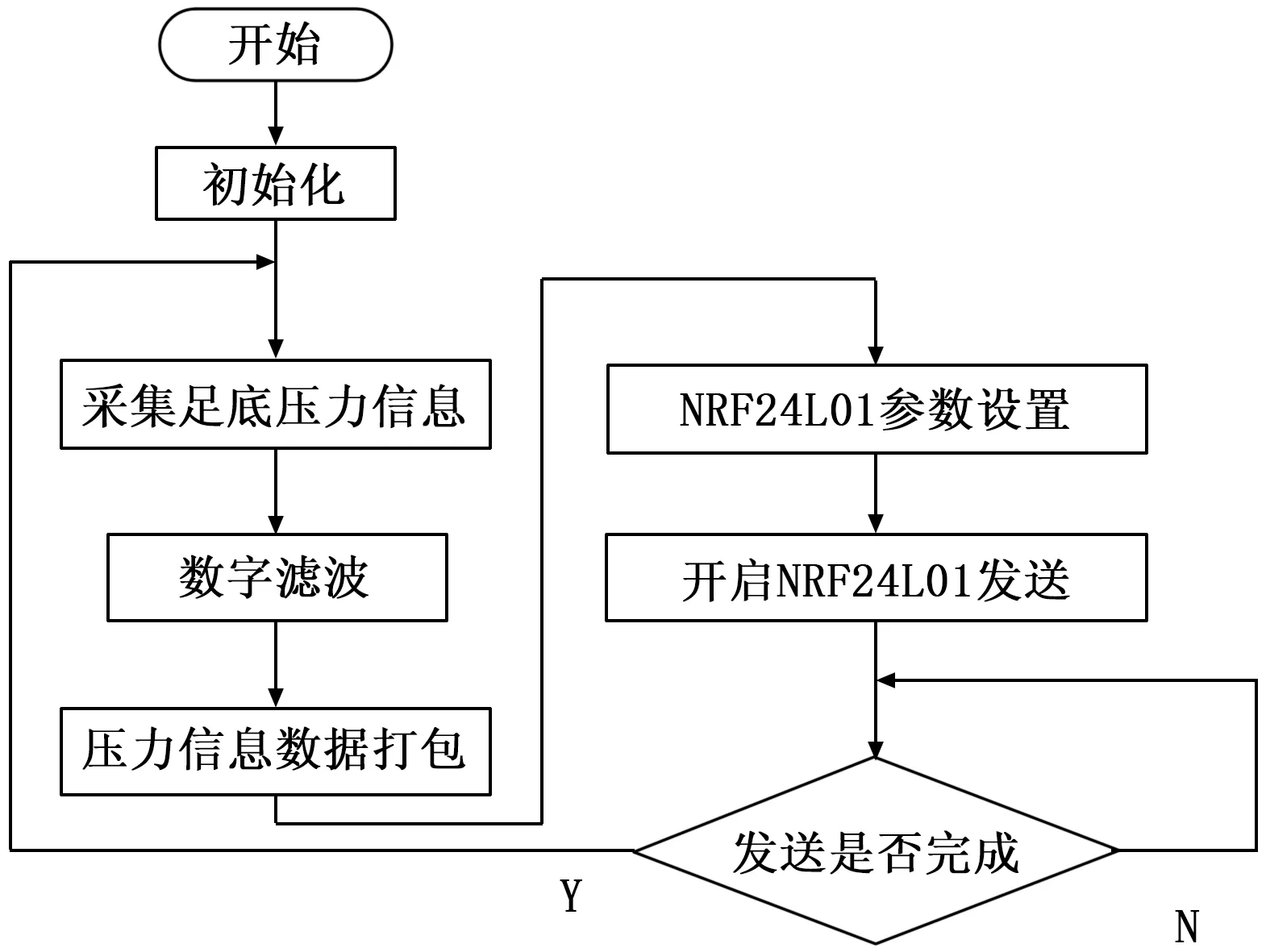
图5 足底压力采集流程图
3.2 上位机软件设计
步态检测系统通过串口与PC机通信,将足底压力采集模块及运动信息采集模块的数据传输至PC机进行数据处理,完成数据存储及显示。上位机界面的设计采用C++ Builder实现。上位机软件处理流程如图6所示。
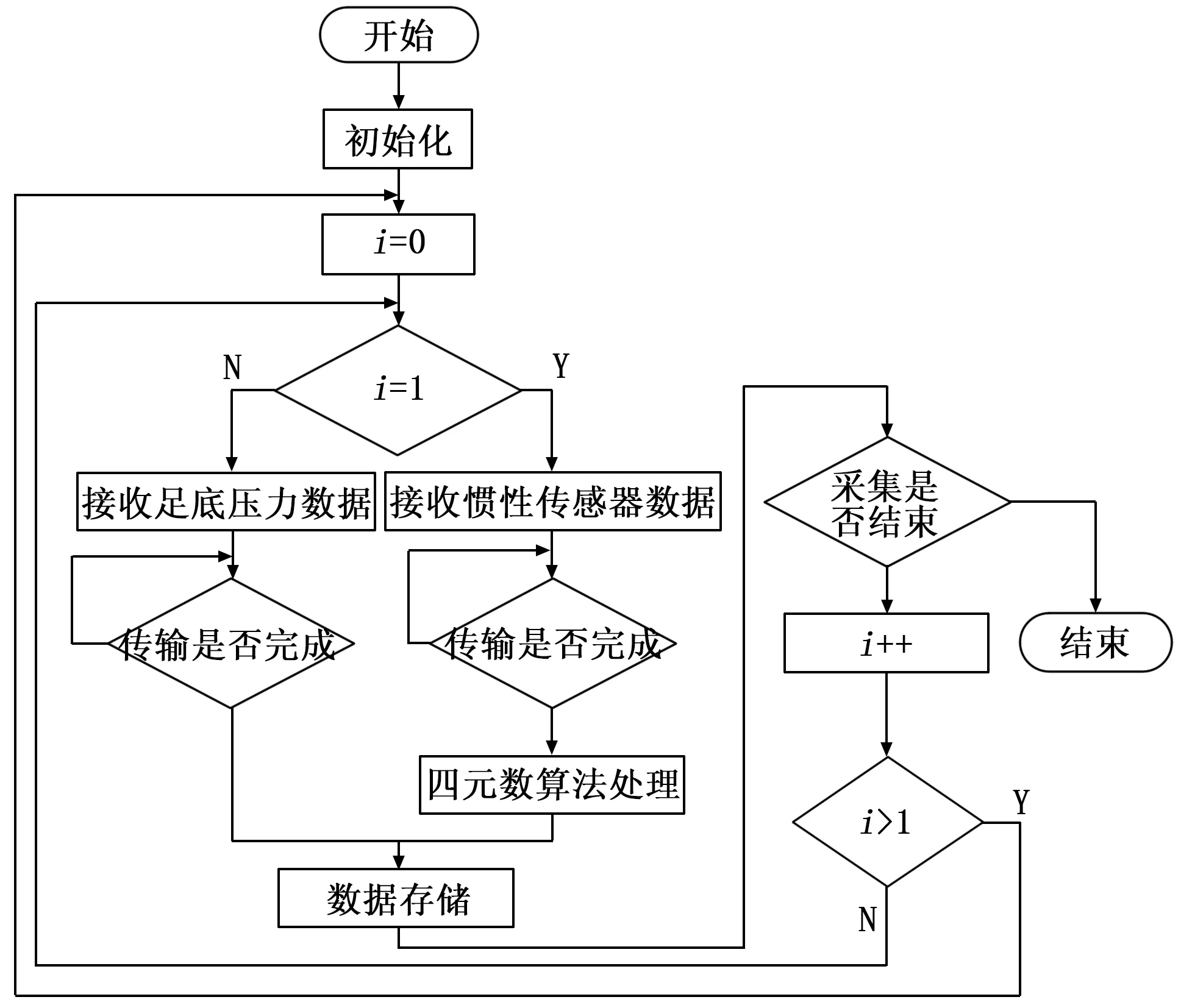
图6 上位机软件流程图
4 系统测试
系统设计完成后,针对设计要求进行系统测试实验。在足底压力变化测量实验过程中,将足底压力检测鞋垫放置于鞋内,同时将7个WB传感器安装在受试者身上,左右脚踝、小腿、大腿及腰部,令被测对象穿着鞋子以正常步态走路,实时获取足底压力变化及关节运动角度变化情况的数据。同样为了控制每次实验的变量,令被测对象均以恒定速率行走。
4.1 足底压力信息采集测试
受试者正常行走时,实时采集足底压力数据,因左右两侧足底压力数据具有对称性,图7仅列出右侧压力信息。
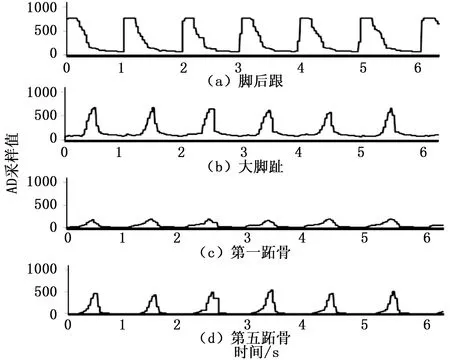
图7 右侧足底压力数据波形
足底压力采集模块可以实现足底压力的有效采集,可以较好反映行走过程中足底压力的变化。人体步态行走周期分为脚跟着地、脚掌着地、脚尖着地、脚跟离地、脚掌抬起、脚尖抬起。人类在正常行走过程中各个受力点所受到的压力是以一定规律呈现周期性变化的,根据对这些变化的分析可以初步得出在某一时刻被测者足部所处的位置以及其步态情况。
4.2 关节运动信息采集测试
在实验中,获取人体各部位WB传感器采集的四元数信息,通过转换算法可以获取人体髋关节、膝关节及踝关节角度。如图8所示。
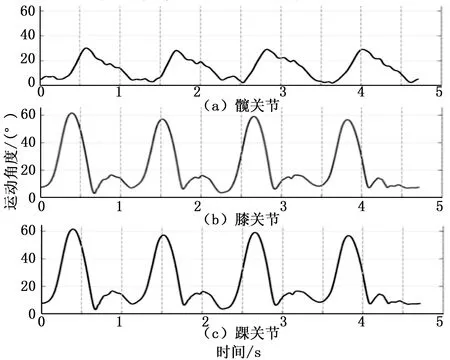
图8 多行走周期运动角度变化信息
图中数据较好反映了人体步态行走过程中,人体髋关节、膝关节及踝关节运动角度的周期变化情况。使用WB传感器,并结合四元数转换算法,能够快速获取下肢各关节运动角度的变化信息。可以在偏瘫患者的康复训练中,为治疗师判断患者运动能力、制定康复计划提供有效的依据。
5 结束语
针对目前步态检测系统中存在的一些问题,设计了一种基于足底薄膜压力传感器及惯性传感器的检测患者运动信息的检测系统。实现了足底压力检测电路的电路硬件设计,惯性传感器数据的获取,无线通信系统的设计。实验结果表明:所设计的系统能够完成8路足底压力信号的采集与实时显示、存储,以及患者关节运动角度信息的获取,能够进行穿戴式足底压力检测和人体步态分析,在实际的偏瘫患者康复训练中有较好的实用性,以及在未来的康复训练量化评价系统中有着良好的应用前景。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
人工晶体学报(2022年6期)2022-07-30
包装工程(2022年10期)2022-05-27
初中生学习指导·中考版(2022年4期)2022-05-12
辽宁科技大学学报(2021年3期)2021-10-15
表面工程与再制造(2019年3期)2019-09-18
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
科学之谜(2018年4期)2018-09-17
理科考试研究·初中(2017年4期)2017-11-04
