
舰船综合电力系统机内测试研究
2018-08-24 07:49,,,
计算机测量与控制 2018年8期
,, ,
(海军工程大学 电气工程学院,武汉 430033)
0 引言
舰船综合电力系统是由中国工程院院士,海军工程大学教授马伟明于2002年提出的,通过集成舰船的发供电、负载用电和推进用电等,实现舰用电能的统一调配和集中控制。相对于以热机为核心的常规动力系统,具有集成度高、噪声小、方便电能的调配等优势,因而得到了迅速发展,广泛应用于民用船舶和军用舰艇上,逐渐成为舰船推进的主动力系统。当前我国舰船综合电力系统已由第一代发展到第二代,即二代综合电力系统,这一技术目前领先于欧美科技强国。图1为某型舰船发电机系统结构示意图。
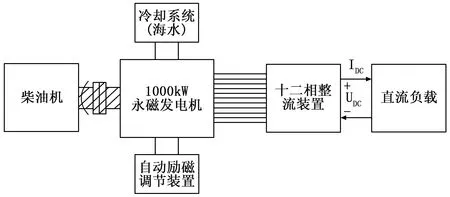
图1 某型舰船发电机系统结构图
随着舰船综合电力系统集成化和自动化水平的不断提高,电气网络拓扑结构越来越复杂,舰用高性能武器种类和数量不断增加,给武器装备的维修保障带来了巨大的困难和挑战,尤其对于赴远海执行任务的海军舰艇,一旦发生故障,后果将不堪设想,因此,如何提高舰员级维修保障能力,具有重要的军事应用价值。
测试性[1-3]是武器装备“六性”之一,是系统或设备本身的一种固有属性。根据GJB2547《装备测试性大纲》中的定义为:系统或设备能够及时、准确地确定其状态(可工作,不可工作或性能下降)并隔离其内部故障的一种设计特性。按照测试方式的不同,测试性技术主要可以分为外部自动测试(ATS)和机内测试(BIT)。外部自动测试是指通过外部测试仪器、工具或设备对被测对象进行检测和隔离的测试,机内测试又叫嵌入式测试,是指系统或设备能够完自己成对系统、组件或功能模块的状态检测、故障诊断以及性能测试。
当前,我国海军舰艇还没有装备系统级BIT设备,但对部分小型系统或现场可更换单元(LRU)的测试性设计工作已经展开并取得了一定的研究成果,如海军工程大学研制的十二相不控整流器测试装置,能够将故障模式精确定位到任意二极管上,从而实现对故障模块的故障隔离,提高装备的使用性和安全性。
1 国内外研究现状
1.1 国外研究现状
在测试性设计领域,国外一直处于领先地位,尤其是美国,不论是测试性概念的提出,还是测试性设计准则的制定,均由美国主导并首先将BIT应用到武器装备系统中去,大大提高了装备作战性能。如美国海军成功将BIT技术应用到一代综合电力系统中,可以实现对电力系统的状态检测、故障诊断和故障隔离,极大地提高了其作战能力。图2为国外BIT技术的大致发展历程[4]。
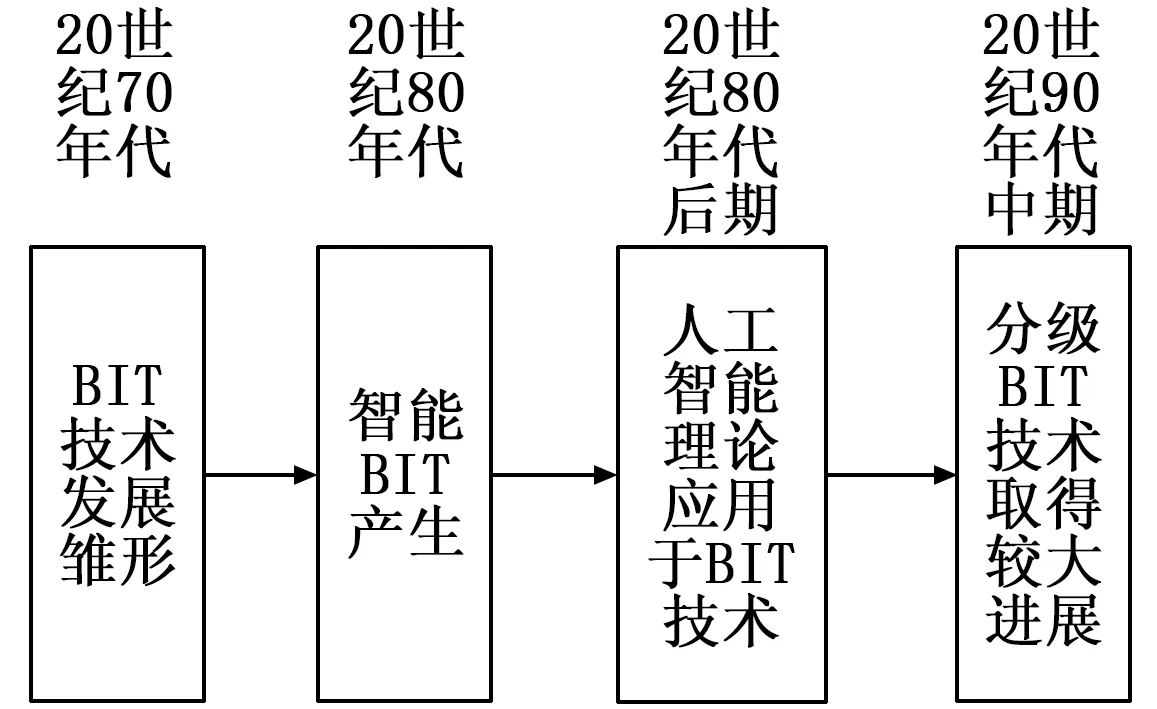
图2 国外BIT发展历程
1.2 国内研究现状
我国BIT技术虽然起步较晚,但也取得了一定的研究成果。国防科技大学在“九五”期间深入研究了边界扫描机内测试技术,建立了智能BIT的理论框架和体系结构,提出了基于边界扫描的智能BIT结构和故障诊断方法;电子科技大学提出了基于CAN总线的复杂电子系统BIT技术方案,对BIT和ATE相结合的综合测试系统进行了预先研究;航天测控开发技术有限公司提出了基于边界扫描和BIST(Built-In Self-Test)相结合的电路板测试方法,研究了边界扫描技术在电路板测试性设计中的应用等[5]。当前,我国已将测试性设计作为武器装备研发过程中必不可少的一个环节,随着国家的重视和研究的深入,BIT技术在不同领域的应用研究必将引起国内外学者的广泛关注。
2 BIT参数
反映BIT设计特性的主要参数有:性能参数、时间参数和限制性参数,如图3所示。
2.1 性能参数
故障检测率(FDR)[6]定义为在规定的时间内,用规定的方法正确检测到的故障数与被测单元发生的故障总数之比,用百分数表示。
故障隔离率(FIR)定义为在规定的时间内,用规定的方法正确隔离到不大于规定的可更换单元数的故障数与同一时间检测到的故障数之比,用百分数表示。
2.2 时间参数
故障检测时间(FDT)定义为从开始故障检测到给出故障指示所经历的时间。
故障隔离时间(FIT)定义为从开始隔离故障到完成故障隔离所经历的时间。
2.3 限制性参数
虚警率(FAR)定义为在规定的工作时间内,发生的虚警数与同一时间内的故障指示总数之比,用百分数表示。
重测合格率(RTOKR)定义为在规定的时间内,在基地级维修的测试中,发现因“报告故障”而拆卸的产品是合格的产品数与被测产品总数之比,用百分数表示。
故障检测率、故障隔离率和虚警率是机内测试(BIT)的主要性能指标。在舰船综合电力系统的测试性设计中,首先关注的是故障检测率FDR,保证舰船装备的可靠性和安全性,其次,要降低虚警率和重测合格率,减少检测时间,提高检测效率。参考国内外测试性要求,对舰船综合电力系统定量要求如下:系统针对单一故障检测率(FDR)要求在95%以上;故障隔离率(FIR)要求在90%以上。由于项目来源于研究性课题,对虚警率等其他性能指标不做明确要求。
3 舰船综合电力系统机内测试
本节对某型舰船综合电力系统进行机内测试的探索和研究,使该型舰船电力系统具有在线监测、故障诊断和故障隔离的功能。由于舰船综合电力系统结构和内部工作环境的复杂性,对舰船综合电力系统所有故障模式实现状态监测与故障诊断十分困难,因此,本文首先对系统进行了层次划分,将系统分为了发电机本体、励磁系统和整流系统3个部分,并从工程可行的角度对各分系统典型故障模式进行研究分析,建立各分系统系统的故障模式统计表,确定了测试参数和相应的故障判断准则。
3.1 某型舰船综合电力系统的建模
3.1.1 发电机模型
该型舰船综合电力系统采用十二相整流混合励磁同步发电机(以下简称混合励磁发电机)发电[7],经十二相不控整流后外接直流负载,或先通过十二相不控整流变成直流电,再经三相逆变器逆变后通入交流负载。混合励磁发电机的二维结构如图4所示。
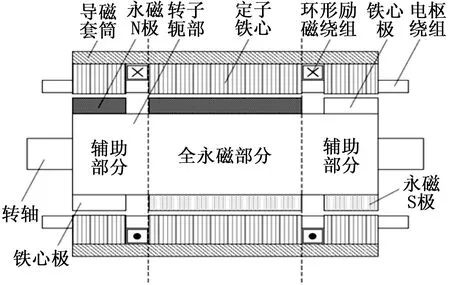
图4 混合励磁发电机二维结构图
由图4可以看出,发电机沿轴向分为全永磁部分和辅助部分,全永磁部分位于发电机中部,辅助部分位于发电机两侧。在定子铁芯内布置两组环形励磁绕组,串联后构成辅助电励磁绕组,定子铁芯由三段硅钢片叠压组成,电枢绕组贯穿整个定子,定子铁芯外圆套有导磁套筒,为辅助励磁绕组提供轴向磁路。
辅助电励磁系统[8]中的自动励磁调节器(AVR)采用PI算法,通过电压互感器采集到的电压值与设定的输出电压值进行比较,调节IPM功率模块中IGBT的占空比,实现对励磁电流大小和方向的双向调节。IPM功率模块主电路如图5所示。
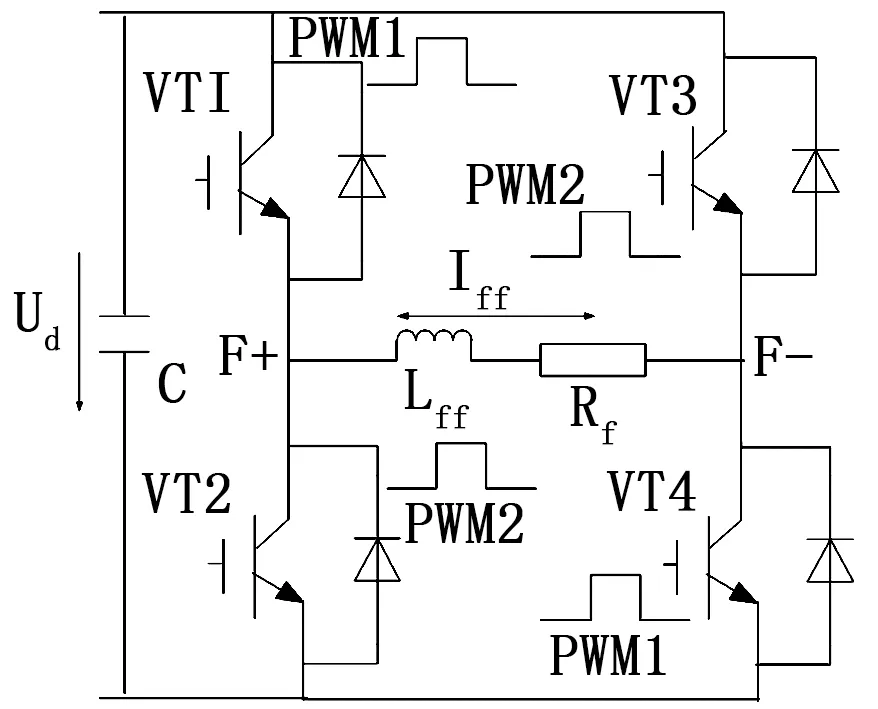
图5 励磁控制器主电路
3.1.2 励磁系统模型
励磁系统分为永磁体励磁和辅助电励磁两部分,其中电励磁系统采用自并励励磁方式,从十二相交流电种取三相经励磁变压器降压,然后通入三相不控整流器整流,所得的直流电经过功率模块调节大小与方向后通入励磁绕组实现对同步发电机的电励磁。辅助电励磁系统的结构如图6所示。
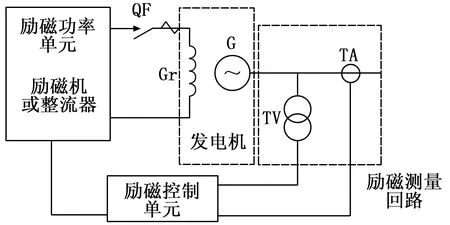
图6 电励磁系统结构图
3.1.3 整流系统
该型舰船综合电力系统中所用的整流方式为不控整流,因此整流系统的核心是十二相不控整流器,其内部结构如图7所示。
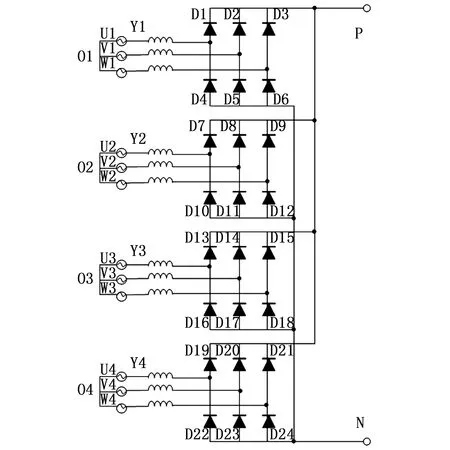
图7 十二相不控整流电路结构图
综上分析,可得整个舰船综合电力系统的结构如图8所示。
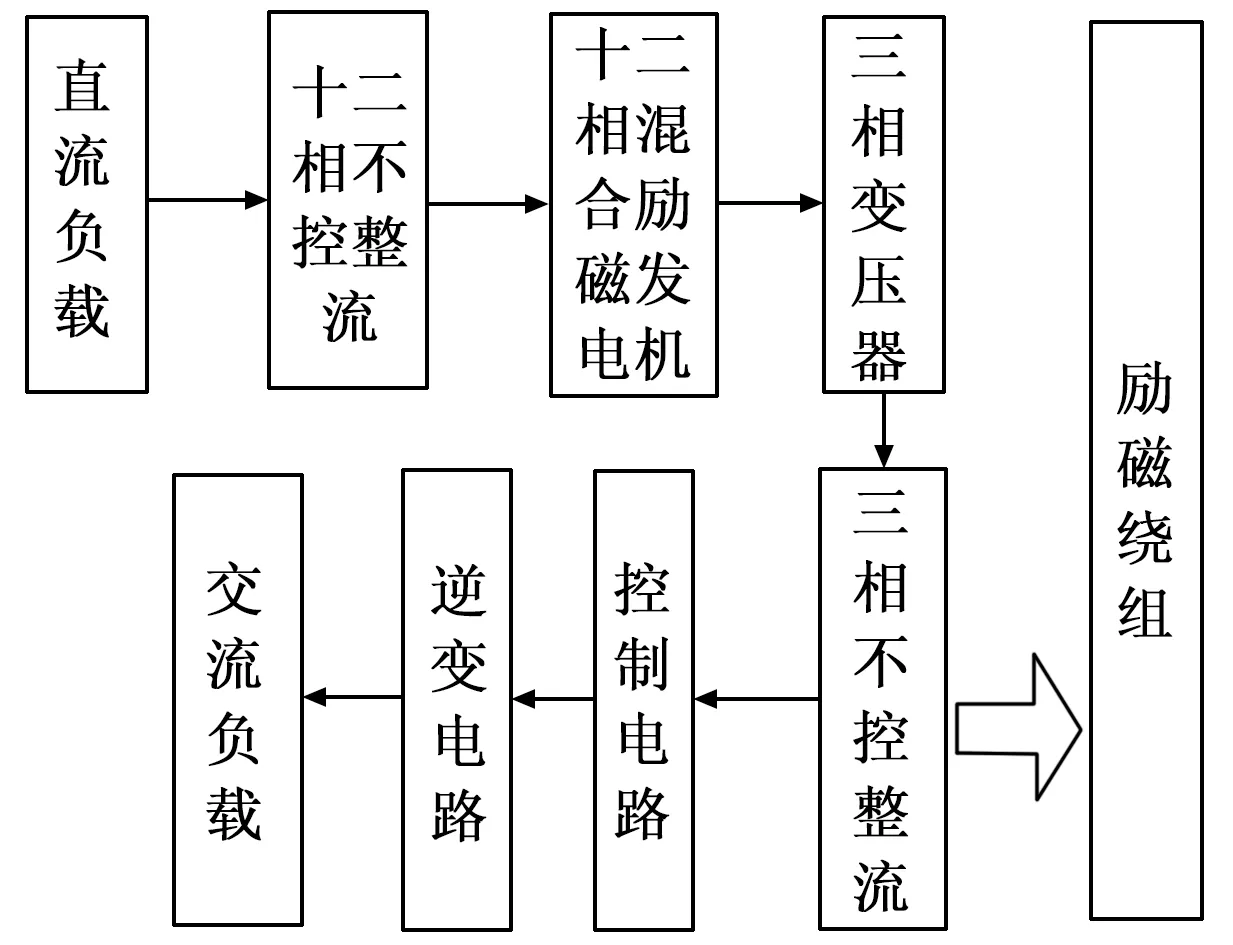
图8 系统框图
3.2 舰船综合电力系统故障模式分析
本文将舰船综合电力系统分成3个分系统,分别是发电机本体、励磁系统和整流系统,下面将分别对3个分系统进行故障模式分析。
1)发电机本体:根据混合励磁电机本体的结构,发电机本体的故障模式主要可以分为定子故障、转子故障和冷却系统故障。具体如表1所示。
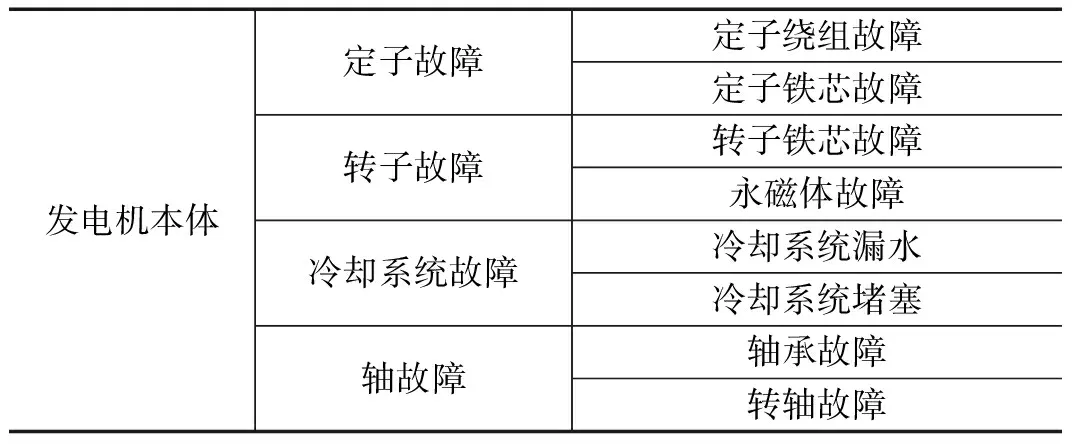
表1 发电机本体故障模式
2)励磁系统:根据励磁系统的结构图,可将励磁系统的故障模式主要分为三相励磁变压器故障、三相不控整流器故障、励磁调节器故障、电压互感器故障、电流互感器故障及灭磁回路故障等,具体如表2所示。
3)整流系统:整流部分采用十二相不控整流,内部有24个二极管和熔断器,由此可得整流系统的故障模式如表3所示。
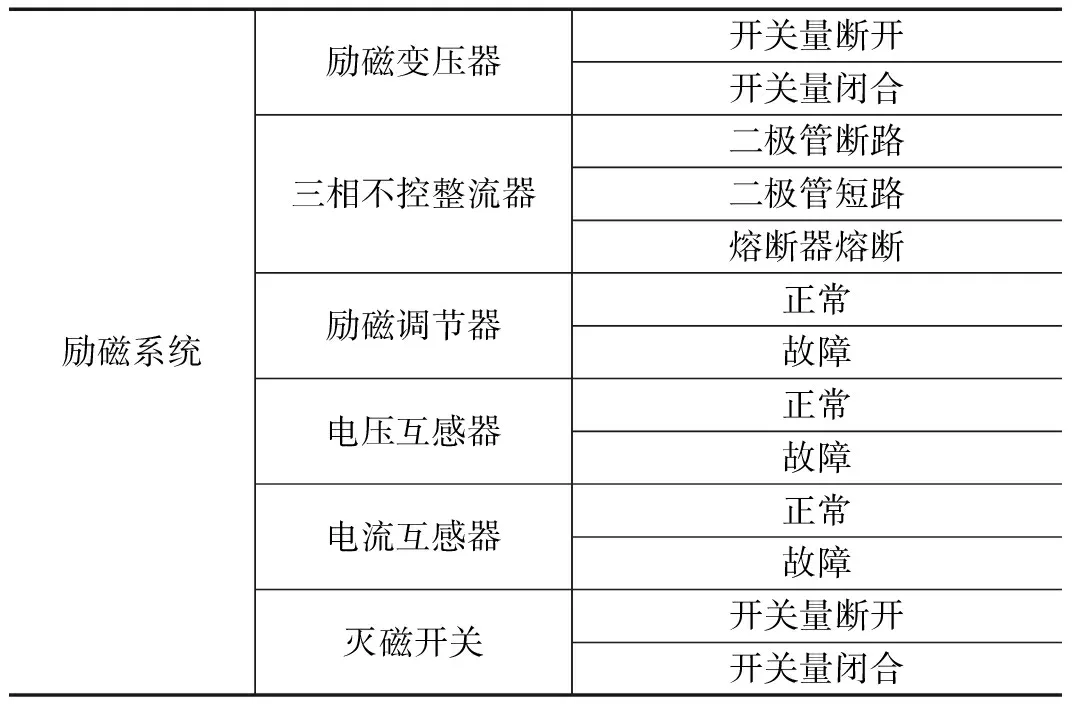
表2 励磁系统故障模式

表3 整流系统故障模式
3.3 各功能模块测试性分析
1)发电机本体测试性分析:混合励磁发电机(以下简称发电机)本体作为整个舰船综合电力系统的核心设备,其运行状态的好坏直接影响系统的可靠性和安全性,因此对发电机本体进行机内测试性非常重要。由于发电机本体内部结构和环境的复杂性,获取的信号中常常带含有许多噪声信号,而且同一故障特征量可能对应多种故障模式,这使得对发电机内部故障进行精确的状态监测、故障诊断和故障隔离变得非常困难。本文主要从工程可行的角度来实现对发电机机内测试设计。主要测量的物理量有温度和电流[9-10]。对于定子绕组和辅助电励磁绕组,主要采取监测绕组温度的方法进行故障检测,对于永磁体则主要利用测量探测线圈中电流的大小来判断永磁体是否失磁,具体测试点和所用传感器如表4所示。
2)励磁系统测试性分析:励磁系统是发电机组运行安全性和可靠性的重要保障,对电力系统的稳定运行起着至关重要的作用。对三相励磁变压器和灭磁开关,主要通过开关量判断其状态,开关闭合则指示灯亮,开关断开则指示灯熄灭。对于励磁调节器、电压互感器和电流互感器,可以通过手动测试来判断其是否有故障,人为改变负载的大小,看输出电压稳定后是否能保持不变。对于三相不控整流器,通过DSP在一个采样周期内对6个二极管进行多次电压采样,在一定的时间内计算出采样电压的平均值与0比较,如果恒为0,则说明对应的二极管发生了短路故障,如果大于零,则说明对应的二极管发生了开路故障。另外,励磁系统还存在发电机过电压、励磁过电流、励磁电流过小等功能故障,对这些功能故障模式可采取实时状态监测的方法来确保系统的正常运行。具体测试点及门限值如表5所示。
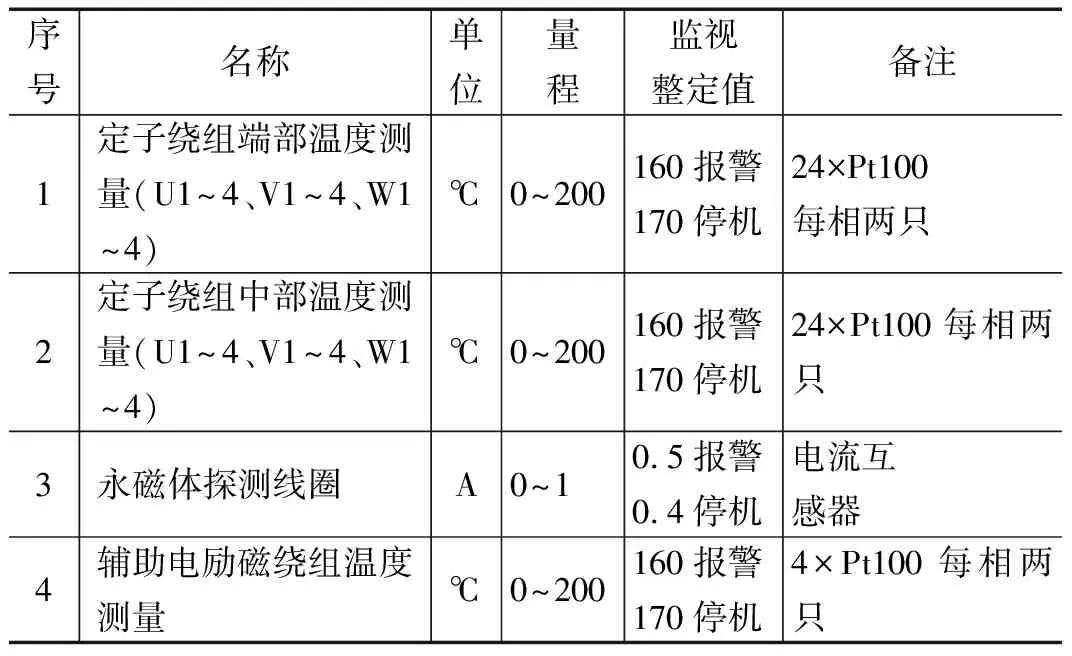
表4 发电机本体测试点分析
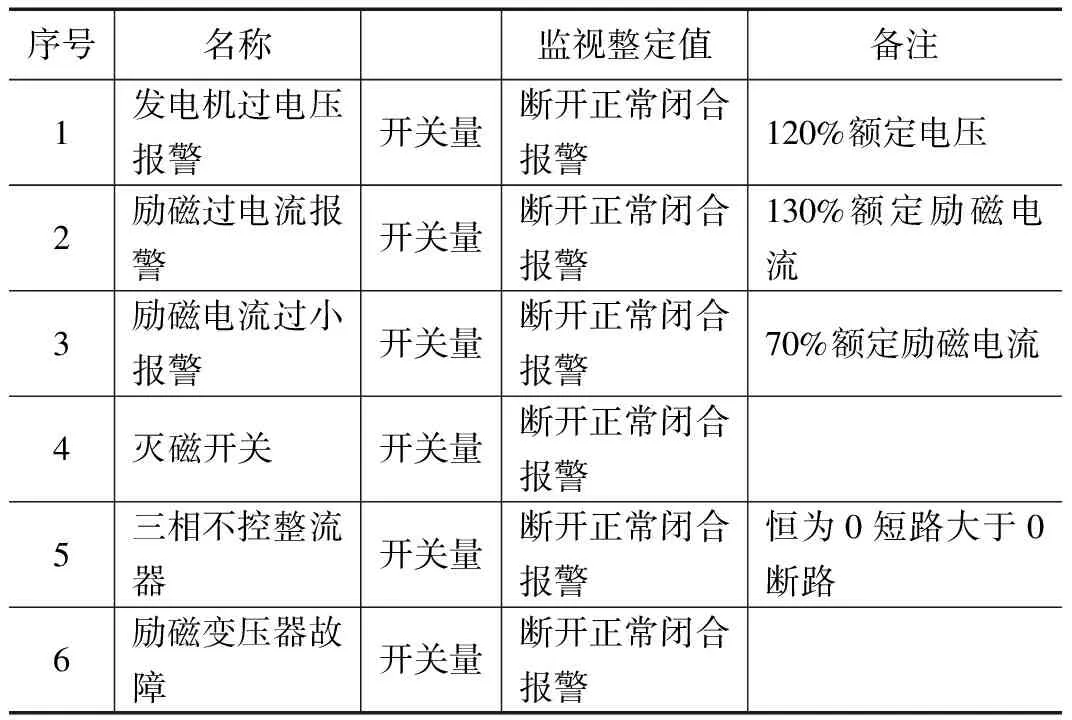
表5 励磁系统测试点分析
3)整流系统:整流系统的作用是将发电机发出的12相交流电变成直流电,然后通入直流负载。对十二相不控整流器进行测试性设计与三相不控整流器类似,通过DSP在一个采样周期内对24个二极管进行多次电压采样,取平均值后与0进行比较,若恒为0,则说明对应的二极管短路,若大于0,则说明对应的二极管断路。
3.4 故障检测与隔离
通过对发电机本体、励磁系统和整流系统的故障模式和测试性分析,确定了各组成模块的测试性参数和测试点[11],为系统的状态监测、故障检测和隔离甚至故障预测提供了理论基础。
3.4.1 状态监测
根据系统测试性需求,对舰船综合电力系统的关键性能或功能参数进行实时监测,并能够实时显示报告给舰员,同时还能够存储记录大量的数据。根据此要求可以设计系统的状态监测流程如图9所示。
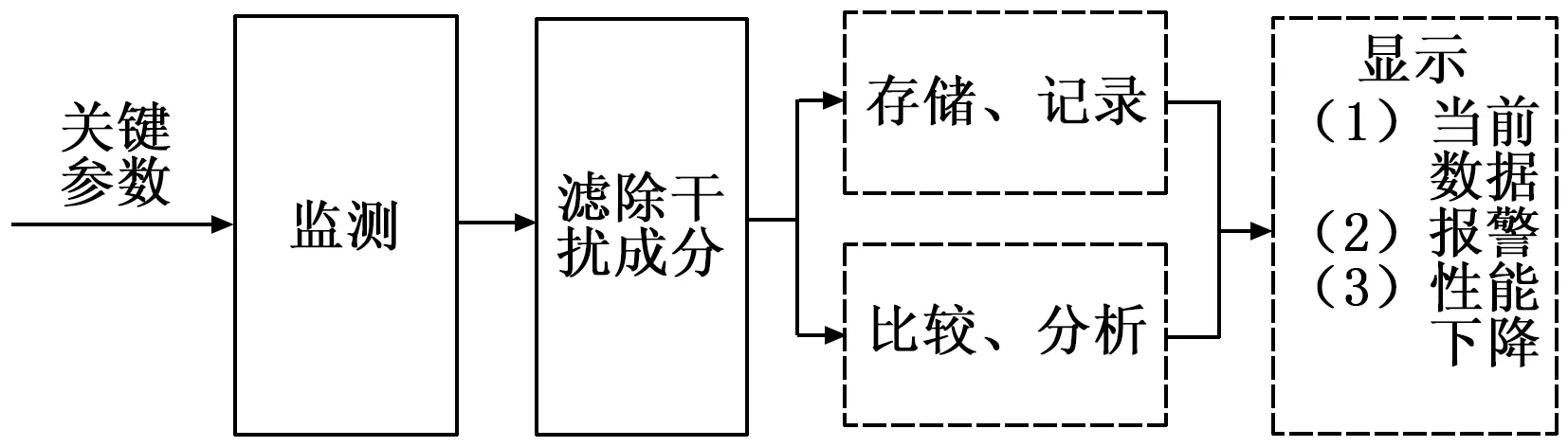
图9 状态监测流程图
图中的关键参数即为表4、表5中的温度、电压和电流参数。
3.4.2 故障检测
故障检测用于判断系统的各个组成模块是否发生故障,检测到故障时给出相应的指示或报警,在故障检测设计中,要特别注意防止虚警,常用的防虚警方法有3中:1)确定合理的门限值;2)确定合理的故障指示和报警条件;3)采取综合决策方法。本文根据多次试验针对某型舰船综合电力系统的具体情况确定了合适的门限值,并通过DSP控制平台,采取多次采样取平均值的方式,有效减少了虚警的发生概率。故障检测分为主动和被动两种方式,为了不影响系统的正常运行,本文的故障检测采取被动式设计方式。具体流程如图10所示。
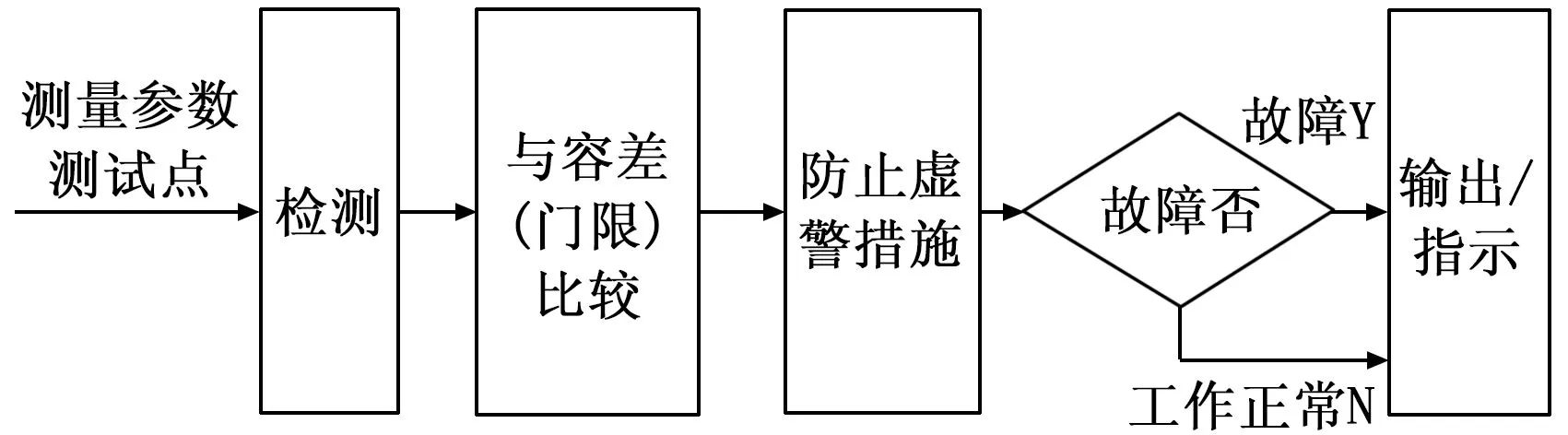
图10 被动式故障检测流程图
图中的测量参数为状态监测环节的采样信号经过滤波后所得到的测试信号。
3.4.3 故障隔离
在检测到系统中某个模块发生故障后,应该考虑将该模块与系统隔离。用机内测试进行故障隔离时,需要测量被测对象内部更多的参数,才能将故障定位到分系统的现场可更换单元。具体的故障隔离流程如图11所示。
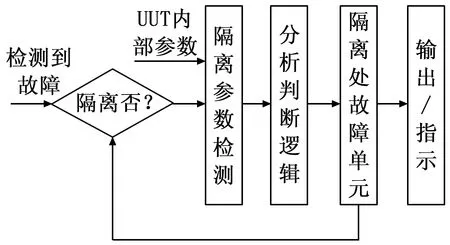
图11 故障隔离流程图
图中输入为故障检测环节检测出的故障模式。
3.5 测试性设计框架
综合上述分析,将舰船综合电力系统划分为发电机本体、励磁系统和整流系统3个部分。每个分系统由各个功能模块组成,通过对对每个功能模块进模块BIT设计,使系统具有模块级的故障诊断和隔离功能。整个系统采用分布—集中式设计,各个模块的状态监测、故障检测和隔离相互独立,互不影响,较复杂的分系统如发电机本体和励磁系统可以采用分布式BIT设计,系统整体上采用集中式故障处理和报警显示,利用专用测试总线进行BIT信息通信,集中显示各个模块的健康状况[12-13],方便操作人员的使用。系统详细机内测试框架如图12所示。
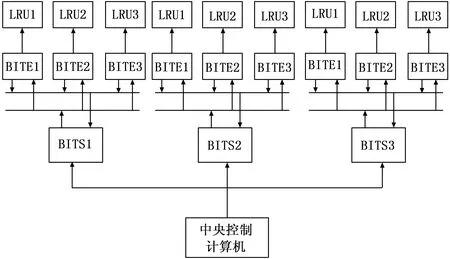
图12 系统机内测试框架图
4 结论
本文通过对某型舰船综合电力系统进行了建模和测试性分析,确定了该型舰船综合电力系统的主要故障模式、测试点以及测试参数。从工程可行的角度提出了系统机内测试设计与分析方法,详细说明了系统状态监测、故障诊断和故障隔离的设计流程,得到了系统最终的机内测试框架图,对后续型号舰船综合电力系统的机内测试与故障诊断工作具有重要的参考价值。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
大电机技术(2022年3期)2022-08-06
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
舰船科学技术(2021年12期)2021-03-29
哈哈画报(2021年10期)2021-02-28
小型微型计算机系统(2019年6期)2019-06-06
图书与情报(2013年1期)2013-11-16
