汽车加装右前轮盲区可视系统方案
2018-08-18 01:15陈辉淦
长春师范大学学报 2018年8期
陈辉淦
(福建信息职业技术学院机械工程系,福建福州 350003)
截止到2016年,我国的汽车销量已经连续八年全球第一,车辆总数也已经全球第一,但车辆原车基本上都不带360°可视系统,最多只带倒车可视系统。很多中低端车连倒车可视系统都不带,车主只能在购买车辆后自行安装车载导航(倒车可视系统)。右前轮区域对多数的车辆来说都是盲区,车辆在通过比较狭窄的道路或人流量比较密集的地方时就有比较大的难度,存在一定的安全隐患。尤其是SUV、皮卡车的右前轮盲区更大。而加装360°可视系统成本较高,线路改动较大。针对上述问题,本文将市面上的车载导航开启倒车影像视频的控制方式分为两种,分别提出相应的加装右前轮盲区可视系统的解决方案,以达到大大降低驾驶难度,提高安全性能,使驾驶员能更安全驾车的目的。
1 汽车车载导航开启影像视频的控制方式
目前市面上汽车车载导航开启倒车影像视频的控制方式分为两种。一种是以日系、韩系、多数自主品牌的车型为代表的“视频信号开启视频”方式,此种倒车可视控制电路简图如图1所示。当电门开启后,车辆挂入倒车挡,倒车挡开关闭合,IG电流到倒车灯,倒车灯点亮;IG电流到倒摄像头CV+上,倒车摄像头通电,倒车摄像头通电后,倒车摄像头的CB+上就有视频模拟信号输出到车载导航CA+上。车载导航CA+收到倒车视频信号输入后,车载导航自动将屏幕切换到显示倒车视频画面。车载导航读取视频信号线上的信号,并在车载导航屏幕上显示出来。另一种是以德系为代表的“CAN总线开启视频”方式,此种倒车可视控制电路简图如图2所示。当电门开启后,车辆挂入倒车挡,倒车挡开关闭合,IG电流到倒车灯,倒车灯点亮;IG电流到倒摄像头CV+上,倒车摄像头通电,倒车摄像头通电后,倒车摄像头的CB+上就有视频模拟信号输出到车载导航CA+上;IG电流到发动机电脑板BRK上,BRK上就产生蓄电池电压,发动机电脑板就判定车辆挂入倒车挡,并通过CAN总线向车载导航和仪表等发送倒车挡位信号。车载导航收到CAN总线发过来的倒车挡位信号后,自动地将屏幕切换到显示倒车视频画面,车载导航读CA+线上的视频信号,并在车载导航屏幕上显示出来。


2 汽车加装右前轮盲区可视系统方案
2.1 视频信号开启视频方式的加装右前轮盲区可视系统方案
运用视频信号开启视频方式加装右前轮盲区可视系统比较简单,成本也很低,改动线路也较少,电路接线图如图3所示。只需加装1个12V的1路常开继电器RLY1、1个12V的2路常开2路常闭继电器RLY2、1个可转动的小型摄像头CAM2、1个三挡船型视频切换开关SW1和1个整流二极管D1。CAM2安装在右前轮后视镜下方,摄像头朝向右前轮。CAM2实车安装照片如图4所示。D1安装在原倒车灯到原倒车摄像头CAM1的CV+上(图3)。D1的作用是实现电流单向导通功能,防止当RLY1常开触头闭合后,ACC的电流到倒车灯,使倒车灯亮起。
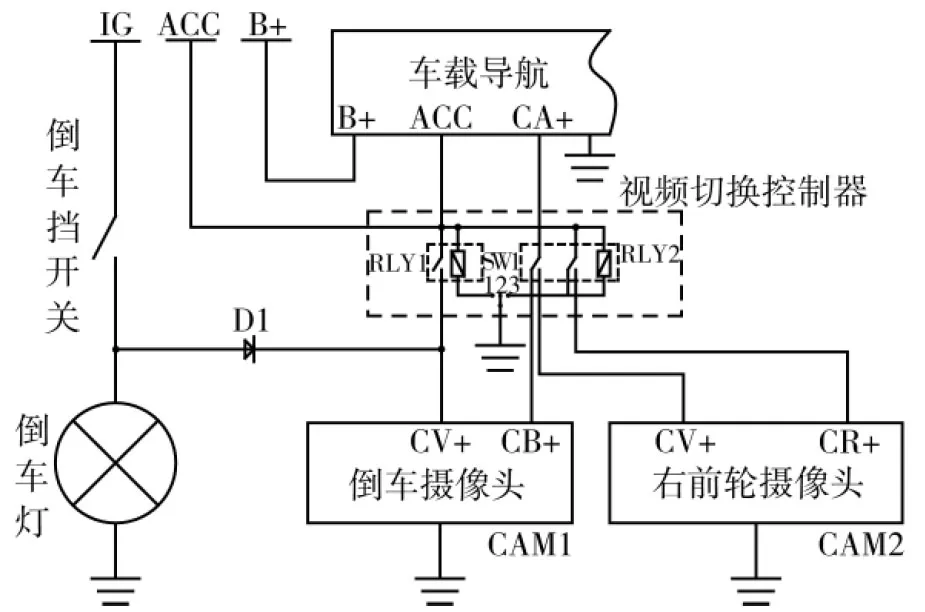
在图3中,当三挡船型视频切换开关(SW1)没有被触动(即在中间位置2处),RLY1和RLY2均不会有动作。原倒车可视线路基本上跟加装右前盲区可视系统之前一样。当电门开启后,挂入倒车挡,倒车挡开关闭合。IG电流流经倒车挡开关至倒车灯,倒车灯点亮。同时IG电流流经D1至倒车摄像头CAM1的CV+,给倒车摄像头供电。摄像头得电后CB+会发出视频模拟信号输出,视频模拟信号流经RLY2的常闭触头至车载导航的CA+。车载导航收到视频模拟信号后自动切换到倒车视频画面,显示右前轮摄像头传来的视频画像。
当电门开启后,不论车辆在任何挡位、任何车速,只要将三挡船型视频切换开关(SW1)拔至位置1处。ACC电流经RLY1继电器线圈,经三挡船型视频切换开关(SW1)位置1回负极。RLY1继电器线圈得电,RLY1继电器的常闭触头闭合。ACC电流经RLY1常闭触头,流至倒车摄像头,给倒车摄像头供电。摄像头得电后CB+会发出视频模拟信号,视频模拟信号流经RLY2的常闭触头至车载导航的CA+。车载导航收到视频模拟信号后自动切换到倒车视频画面,显示倒车摄像头传来的视频画像。因为D1具有单向导通作用,所以倒车灯不会被点亮。
当电门开启后,不论车辆在任何挡位、任何车速,只要将三挡船型视频切换开关(SW1)拔至位置3处。ACC电流经RLY2电器线圈,经三挡船型视频切换开关(SW1)位置3回负极。RLY2继电器的两个常开触头闭合,两个常闭触头断开。ACC电流经RLY2的1个常开触头,流至右前摄像头的CV+,给右前摄像头供电。右前摄像头得电后CB+会发出视频模拟信号,视频模拟信号流经RLY2的另一个常开触头至车载导航的CA+。车载导航收到视频模拟信号后自动切换到倒车视频画面,显示倒车摄像头传来的视频画面。
2.2 CAN总线开启视频方式的加装右前轮盲区可视系统方案
采用CAN总线开启视频方式加装右前轮盲区可视系统,比视频信号开启视频方式的加装右前轮盲区可视系统技术含量高一点,成本也高一点。但改动的线路不多,电路接线图如图5所示。只须加装视频切换控制器、1个可转动的小型摄像头CAM2、1个三挡船型视频切换开关SW1和1个整流二极管D1。CAM2安装在右前轮后视镜下方,摄像头朝向右前轮,实车安装的照片见图4。D1安装在原倒车灯摄像头CAM1的CV+上。D1的作用是使电流单向导通,当Q1导通,ACC电流向原倒车摄像头的CV+供电,防止ACC电流到倒车灯,使倒车灯亮起。

当电门开启后三挡船型视频切换开关(SW1)没有被触动,即在中间位置2处,单片机使Q1、Q2、Q3、Q4均处于截止状态,并MCU进入休眠模式。线路与之前没有加装右前轮可视摄像头是差不多的。当车辆电门打开后,车辆挂入倒挡,挡开关闭合,IG电流流经倒车灯,点亮倒车灯。一路电流经D1给CAM1供电,原倒车摄像头CAM1发出倒车视频信号,经RLY2的常闭触头至车载导航CA+。另一路电流同时也流到发动机电脑板BRK上,发动机电脑板判定车辆挂入倒挡,通过发动机CAN总线将倒挡挡位信号发送至仪表、车载导航等。因Q3处于截止状态,发动机CAN总线经RLY2的常闭触头至车载导航。车载导航收到发动机CAN总线发过来的倒挡信号,车载导航切换到倒车画面,读取倒车摄像头的上视频信号,实现开启倒车摄像头功能。
当电门开启后,三挡船型视频切换开关(SW1)拔到位置1处。视频切换控制器内的单片机MCU产生中断唤醒,使Q1、Q4导通,使Q2、Q3均处于截止状态。Q1导通后ACC电流至原倒车摄像头的CV+上,给原倒车后视摄像头供电;因二极管D1有单向导通的作用,从而阻止了ACC电流至倒车灯上。Q4导通后RLY2继电器线圈得电,继电器触头动作,将车载导航的CAN-H、CAN-L联到MCU-CAN-H、MCU-CAN-L上,MCU向MCU-CAN-H、MCU-CAN-L发出倒车的CAN信号[1],使车载导航切换到倒车画面,读取倒车摄像头上的视频信号,实现开启倒车摄像头的功能。因Q4导通后RLY2继电器线圈得电,继电器触头动作[2],将车载导航的CAN-H、CAN-L跟原车CAN-H、CAN-L断开,车载导航不会读取当前车的挡位信号。
当电门开启后,三挡船型视频切换开关(SW1)拔到位置3处。视频切换控制器内的单片机MCU产生中断唤醒,使Q2、Q4导通,Q1、Q3均处于截止状态。Q2导通后ACC电流至右前轮摄像头的CV+上,给原右前轮摄像头供电。Q4导通后RLY2继电器得电,继电器触头动作,将车载导航的CAN-H、CAN-L联到MCU-CAN-H、MCU-CAN-L上,MCU向MCU-CAN-H、MCU-CAN-L发出倒车的CAN信号,使车载导航切换到倒车画面,读取倒右前轮摄像头的上视频信号CR+,开启右前轮盲区视频信号。因Q4导通后RLY2继电器线圈得电,继电器触头动作,将车载导航的CAN-H、CAN-L跟原车CAN-H、CAN-L断开,车载导航就读不到发动机电脑板发来的车辆当前的实际挡位信号。
3 结语
驾车安全关乎驾驶员的切身利益,也关乎其他群体的人身安全。本文针对市面上两种主要类型车辆右前轮区域为盲区,存在严重的安全隐患这一实际问题,进行分析、研究和改进。使车辆右前轮盲区成为可视区域,削除了右前轮盲区导致的安全隐患,提高了驾车安全性能。此改进方案操作简便、切实可行、安全可靠。经测试,截至发稿日两年多,笔者对这两种车载导航倒车视频控制汽车加装的右前轮盲区可视系统,均未发现故障或异常现象,其性能可靠,具有一定的实用价值。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
汽车实用技术(2022年7期)2022-04-20
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年12期)2019-01-31
家庭影院技术(2018年6期)2018-07-17
电脑知识与技术(2017年27期)2017-11-20
资源再生(2017年4期)2017-06-15
电子制作(2017年24期)2017-02-02
中国卫生(2015年5期)2015-11-08
电子设计工程(2015年8期)2015-02-27