
基于立体层析反演的低频模型构建在深水区储层反演中的应用:以南海深水W构造为例
2018-08-17 03:15叶云飞孙建国张益明
吉林大学学报(地球科学版) 2018年4期
叶云飞,孙建国,张益明 ,熊 凯
1.吉林大学南方研究院, 广东 珠海 519090 2.中海油研究总院有限责任公司,北京 100027 3.海洋地质国家重点实验室(同济大学),上海 200092
0 引言
波阻抗反演是储层预测的基础,其精度依赖于背景或低频速度模型的精度。因此,如何求取低频速度模型这一问题一直受到众多地球物理学家的关注[1-6]。到目前为止,已经提出了井控插值法、协克里金法、序贯高斯模拟法、速度谱转化法、多次迭代滤波法等多种方法[6-16]。其中:井控插值法需要钻井数量较多,且模型可靠程度受井间距离影响严重[3];基于地质统计学建模的方法(协克里金法和序贯高斯模拟法)虽然精度较高,但需要有较多样本点时统计结果才更可靠,并不适用于勘探早期阶段研究[4];常规地震资料处理过程中速度谱的精度较低,无法反映复杂储层的横向变化特征。
我国南海深水区普遍面临着勘探程度低、钻井数量有限、地层埋深跨度大、储层横向非均质性变化剧烈、断裂特征复杂的难题,在此地区上述模型构建方法的缺点体现得尤为突出,使储层及油气预测的成功率较低。因此,本文针对我国南海深水区勘探现状及已有低频模型构建方法的缺点,提出了一种基于立体层析反演技术的低频模型构建方法。该方法利用立体层析反演技术可以获得高精度速度模型的优势,结合有限的钻井信息对该速度模型进行标定,然后构建出符合深水区地震反演需求的低频模型,以期解决我国深水区少井、无井条件下地震储层反演过程中低频模型构建难的问题,提升深水储层预测的成功率。
1 立体层析反演理论
“立体层析”的原词是stereo-tomography,最原始的“立体”表达的含义是Billiette等[17]所说的:由于将射线参数和射线出射坐标都引入了数据空间,相比仅仅使用旅行时的传统层析方法,其数据空间更为丰富和全面,故将这种方法命名为“立体层析”。立体层析是一种基于射线扰动理论的层析成像方法,除了旅行时之外,它将共炮道集和共检波点道集内局部同相轴的斜率(即慢度矢量水平分量)、炮点坐标、检波点坐标也纳入到数据空间。与此相对应,反演的模型分量也不仅限于速度,还包括反射点位置、反射层的局部倾角以及射线对的张角。其优势在于,数据的提取只依赖于局部相干同相轴的运动学信息,计算更为方便,可以同时反演速度、反射点位置与反射层局部形态[18-20]。它有两种实现方式:数据域立体层析和成像域立体层析。本文综合了数据域立体层析与成像域立体层析的优势,获得大大超出常规地震叠加速度谱精度的宏观速度模型。
1.1 数据域立体层析反演
立体层析成像属于数据拟合类反演方法,即找到一个模型矢量,使正演得到的数据与拾取数据的误差达到最小。以常用的二范数衡量拟合误差作为目标泛函,则立体层析反演归结为如下泛函的求极值问题:
(1)
式中:m为模型空间;d为数据空间;f为反演过程中使用的正演算子;Δd(m)=d-f(m)。对上述二范数泛函S(m)求梯度即可获得最小平方意义下的线性方程组:
FTFΔm=FTΔd(m)。
(2)
式中,F为Frechet导数矩阵,可以通过射线扰动理论[21-22]求得。考虑到实际应用中噪音的存在,以及射线的覆盖密度不一定均匀,矩阵F一般是病态的,施加规则化后的泛函可写为如下新的误差泛函:
(3)
施加正则化之后需要求解的线性方程组为
(4)
式中,I为单位矩阵。利用最小二乘方法(LSQR)可以在最小二乘意义下高效地求解大规模稀疏矩阵方程组(4),完成数据域立体层析成像。这些正则化因子依据不同的实际数据,需要通过测试得到。在本文的实际数据中,这些权因子分别为εd=0.001;εc1=0.02;εc2=0.02。
1.2 成像域立体层析反演
成像域立体层析的要点是先用初始速度模型进行成像,然后从初始成像体的运动学信息出发,通过实施运动学反偏移+P参数(P为慢度)校正获得正确的立体层析数据空间信息(图1)。在克希霍夫偏移过程中,成像条件应满足
tS(S,x,z,u)+tR(x,z,R,u)=t(h,m)。
(5)
式中:tS和tR分别为成像点(x,z)到炮点S、检波点R的单程走时;t为总旅行时,t=tS+tR;u为地下的速度;h为半偏移距;m为炮检距的中心点位置。
P参数校正公式为:
(6a)
(6b)
图1 运动学反偏移+P参数校正图示Fig.1 Illustration of kinematic demigration +P parameter correction
运动学反偏移实质上就是射线从地表出发,找到正确的地表炮检点位置的过程。

1.3 低频宏观速度建立方法
非一次反射波的运动学信息对于立体层析而言完全是噪音,而通过人工拾取数据点位置可以避开这些干扰,这也是运动学反偏移的一大特点。考虑需要适当的人工干预,立体层析在实际应用中由两步法构成:首先,通过自动拾取获得一个较为满意的初始速度模型,其好处是效率高;再根据人工干预在成像域拾取感兴趣的数据点,通过运动学反偏移去除与非一次反射波有关的数据点,进一步提升立体层析反演的精度。本文即通过该两步法获得了较高精度的速度场,为储层反演建立高质量的低频模型提供了可能。
2 南海深水实际应用
在我国南海深水区,钻井成本非常高,钻井数量有限,因此单纯依靠井资料建立速度模型是不现实的。更为困难的是,研究区目的层地层埋深起伏较大,如果没有一个较准确的初始模型,则反演结果的横向准确性将受到极大挑战。从南海深水区过W构造(背斜)的地震剖面(图2)可以看到,受古地形特征影响,目的层珠海组(图中蓝色解释层位之间)埋深差异较大。在珠海组上段为一套连续性很好的强振幅地震反射层,并且左侧构造高部位(W-1井位置处)已经过钻井证实为一套优质储层。但是,随着埋深的加大,在珠海组下段地震反射振幅能量迅速衰减,整体呈现出低频、弱振幅反射特征,受常规反演低频模型补偿方法的限制,反演结果很难清晰地体现储层特征。为此,按照前文提出的思路,我们首先构建精确的速度模型。
本文选用的二维测线长150 km,共3 404炮,最大偏移距8 275 m,最小偏移距200 m,炮间距50 m,检波点间距25 m。首先进行数据域立体层析反演处理。如前所述,数据域立体层析中拾取数据的精度十分重要。为保证拾取的精度,反演之前的数据做了精细的前期处理,如:各种噪音的去除、多次波压制、提高分辨率等处理,确保拾取前的数据具有较高的信噪比和精度。
梯度平方结构张量算法的效率非常高,本次反射波拾取偏移距范围为200~5 275 m,每隔200 m进行一次拾取,纵向时间范围不超过8 s。
图3展示了数据域立体层析算法迭代中的一些中间结果。图3a、b、c、d分别展示了为第1、5、6、16次迭代更新后的速度场,可以看出,随着迭代次数的增加,反演结果逐渐收敛。观察16次迭代后的倾角条(DIP-BAR)形态可以看出,反演结果已能较好地展示地下构造形态;故将数据域的第16轮迭代结果作为成像域层析的初始模型使用。
在实施成像域立体层析之前,如文献[21]所述,需要将共偏移距成像剖面的构造倾角与共成像点道集的剩余深度曲率特征提取出来。在实际处理中,实施成像域立体层析的具体步骤为:第一步,在经过去噪处理的地震道集上生成垂直速度谱;第二步,在叠前道集和叠加剖面上随机拾取一定数量的种子点作为输入的初始采样点;第三步,在叠加剖面上拾取构造倾角ξ,在CIG(共成像点道集)上拾取RMO信息;第四步,将前面拾取的信息进行如式(2)所示的运动学反偏移获得成像域立体层析所需的数据空间;第五步,对第四步获得的数据空间实施立体层析反演,待泛函下降到一定程度时即结束。
图2 目标区地震剖面Fig.2 Seismic data in target area
图4为常规速度和成像域立体层析速度的比较,可以看到,成像域立体层析的速度剖面中显示出更多细节以及构造、岩性变化的纵、横向差异,地震速度谱的精度得到了显著提升。
在构建反演低频模型过程中,还要将速度谱信息与钻井实测的信息进行反复比较,通过井上速度进一步标定速度谱,以期构建更为准确的速度模型。
最后,利用上述速度谱分别构建低频模型进行反演,反演结果如图5所示。从图5a可以看到,基于常规速度谱反演的波阻抗结果遵循了基于地震反演波阻抗的规律,珠海组上段波阻抗能量值强、连续性好;但珠海组下段波阻抗反演结果精度非常差,难以反映地下真实沉积情况。图5b为基于如图4b所示立体层析速度剖面反演的波阻抗剖面,在珠海组下段反演出较为明显的低波阻抗砂体,符合珠海组下段扇三角洲沉积规律。这种反演结果上巨大的差异变化,主要来自于低频模型是否能够准确构建。
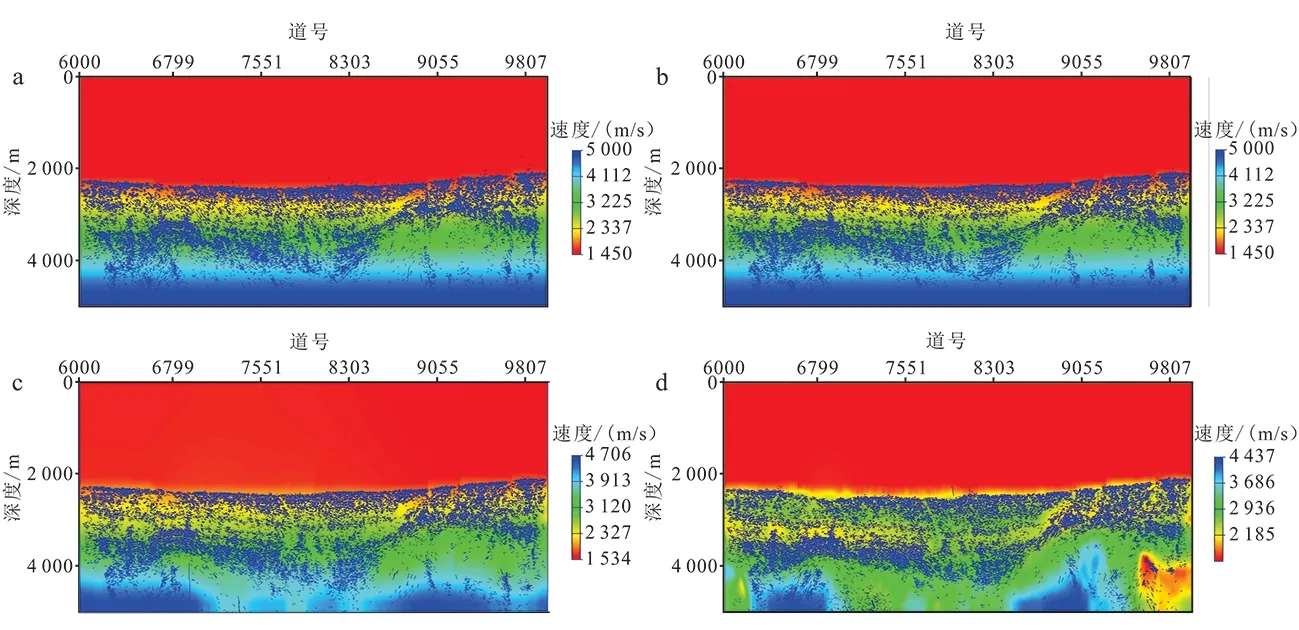
a. 第1次迭代更新后;b. 第5次迭代更新后;c. 第6次迭代更新后;d. 第16次迭代更新后。图3 数据域立体层析迭代反演Fig.3 Three-dimensional tomographic velocity inversion in data domain
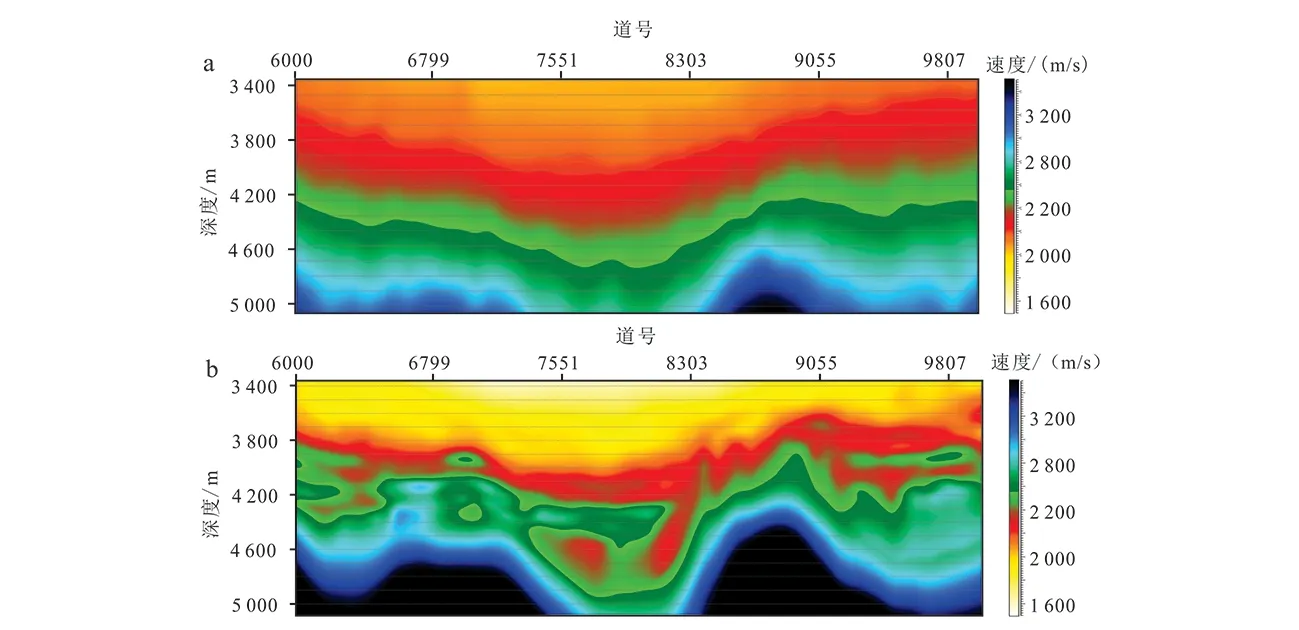
图4 常规速度(a)与成像域立体层析速度(b)比较Fig.4 Comparison of normal (a) and three-dimensional tomographic (b) velocity
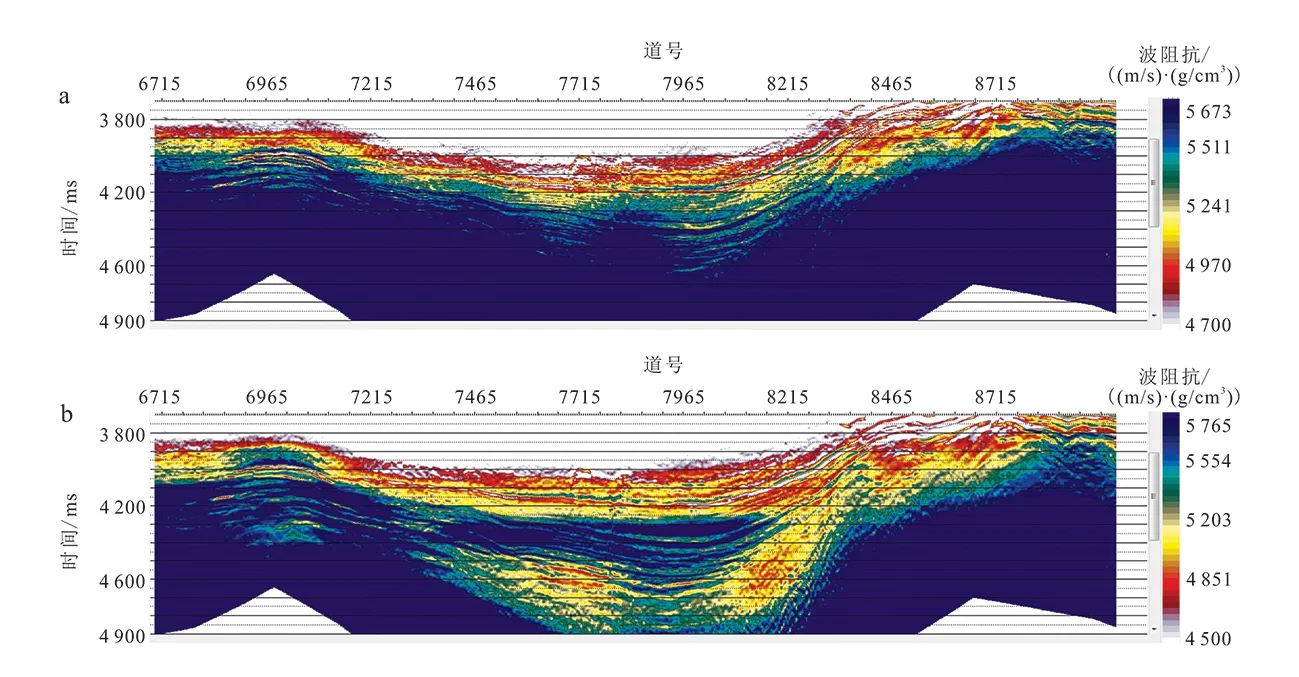
a. 基于常规速度反演的波阻抗;b. 基于成像域立体层析速度反演的波阻抗。图5 反演结果比较Fig.5 Comparison of impedance inversion results
3 结论和认识
1)波阻抗反演过程中的一个重要步骤就是补充地震资料中所缺失的低频信息,因此,能否构建准确的低频模型是制约反演结果准确性的核心。
2)鉴于常规地震资料处理过程中速度谱精度低的缺陷,本文提出了一种基于两步法立体层析反演策略获得高精度低频宏观背景模型的思路,通过多次迭代计算,可以有效提高背景速度的精度,再通过与井资料的标定,构建出反演过程中的低频模型,进而获得较好的反演结果。
3)该方法特别适用于我国南海深水区少井、无井的勘探区域,在地层起伏较大、地层压力变化较大的区域效果尤为明显。
猜你喜欢
中等数学(2022年5期)2022-08-29
土壤学报(2022年1期)2022-03-08
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
中国海上油气(2020年5期)2020-10-20
中等数学(2020年2期)2020-08-24
价值工程(2020年17期)2020-08-03
铁道标准设计(2019年2期)2019-01-23
商品与质量(2018年38期)2018-04-16
电子技术与软件工程(2018年23期)2018-02-28
