
自动变速器电子油泵电机控制方法研究
2018-08-14 11:08曾鹰
汽车零部件 2018年7期
曾鹰
(中国汽车工程研究院股份有限公司,重庆 401122)
0 引言
自动变速器以油液为传动媒介,驱动离合器和拨叉完成各种动作。传统液压系统采用的机械式油泵效率低下,并且在某些对油压需求较小的工况,仍然满功率运行,造成能源浪费、油耗高。因此新式的以电子油泵代替机械油泵的液压系统得到发展应用。电子油泵以无刷直流电机(Brushless Direct Current,BLDC)作为驱动,具有效率高、响应快和功率可调等优点。BLDC是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机,具有体积小、质量轻、使用寿命长、效率高、惯量小和控制精度高等优点,同时还保留了普通直流电动机优良的机械特性。应用于汽车的产品要求控制系统设计简易、成本低廉、控制算法合理、开发周期短。
1 无刷直流电机工作原理
图1展示了BLDC电机的横截面,可以看出它主要由永磁转子、定子绕组和转子位置检测器(霍尔传感器)3个部分组成。无刷直流电机的设计思想来源于有刷直流电机,与有刷直流电机相比,除了没有机械电刷之外,其定子和转子的位置也互调了。无刷直流电机的转子由永磁体组成,产生随转子旋转的恒定磁通。无刷直流电机的定子中有多相绕组,常常为三相。其运行原理与有刷直流电机一样,即都是在一个恒定的磁通密度分布的磁极下,由电流总量是恒定的绕组导条切割由磁极产生的磁力线,感应出恒定大小的电磁转矩(同一转速下)。只是无刷直流电机产生磁通的磁极是旋转的,而切割磁力线的导条是不动的,但是这两者之间还是保持着相对运动的关系。

图1 BLDC电机结构示意图
无刷直流电机驱动有多相结构,可分为半桥驱动和全桥驱动,全桥驱动又分成星形和角形连接以及不同的通电方式。如图2所示,采用的方式为三相星形全桥驱动,该方式以绕组利用率高、转矩的波动较小和电路成本较低的优势而使用最多。
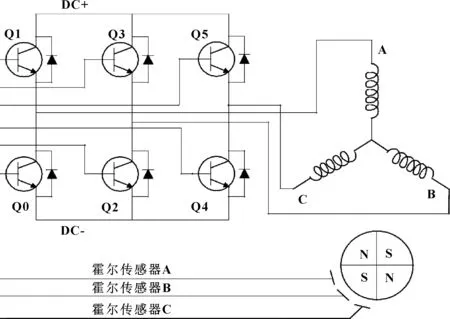
图2 电子油泵电机三相星型全桥电路示意图
2 电子油泵电机的控制方法
2.1 直流无刷电机控制方式
无刷直流电动机控制方式通常可以分为三相六状态120°双极性、三相六状态180°双极性、三相三状态120°单极性、三相六状态180°单极性4种方式。三相六状态双极性控制方式每次至少两相绕组导通,可以保证导通绕组处于较大的磁通密度下,对比三相三状态控制方式,更加充分地利用了永磁体磁极产生的磁通。而三相六状态180°双极性控制方式在任意时刻都有三相绕组导通合成的电磁转矩比三相六状态120°双极性方式下的要大,使得电机的耗电量上升,因此较常用的控制方式为三相六状态120°双极性控制方式。
2.2 三相六状态120°双极性控制方式

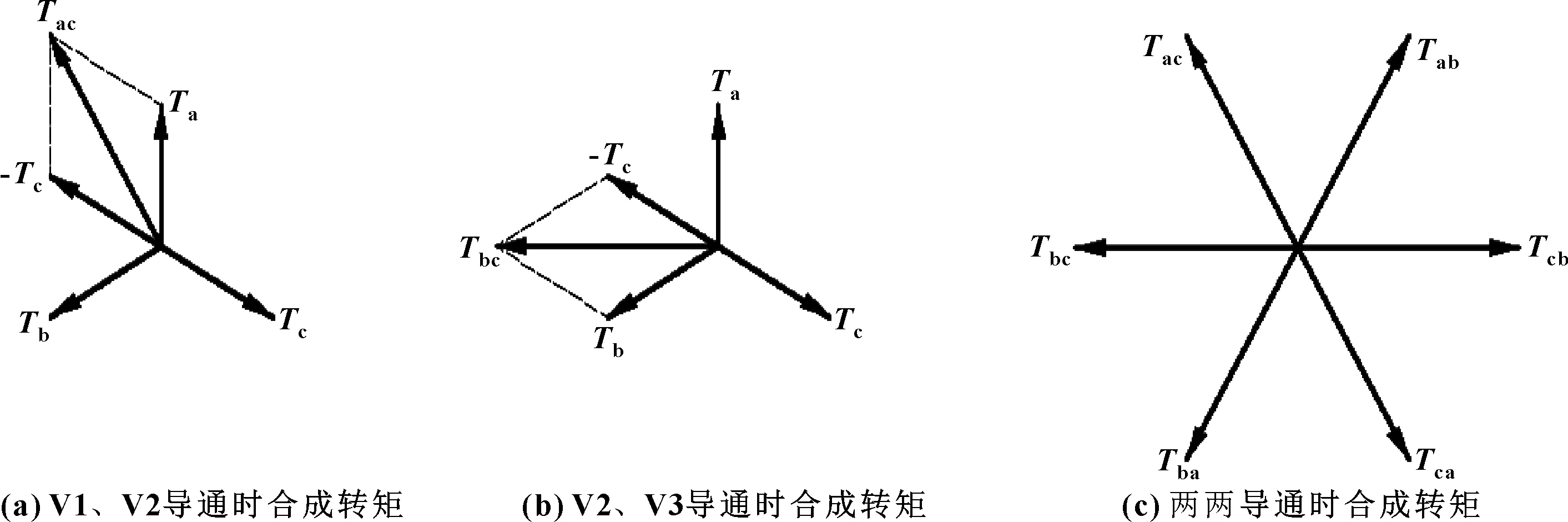
图3 联结绕组两两通电时的合成转矩矢量图
如图4所示,每个状态下,均有两相绕组被导通,即每个状态下,有两相导通绕组切割磁力线。其感应产生的电磁力将是两相绕组产生的电磁力的合成。由于在转子磁极边缘磁通很小,在两极的中间位置,磁通为零。为了充分利用转子磁极产生的磁通,获得最大的电磁转矩,在每次两相绕组导通的情况下,使用60°电角度换相的方法,一共有6个状态。
定子星形连接,三相绕组完全对称,工作在二相导通、三相六状态下;反电势波形是平顶宽度为120°(电角度)的梯形波;电机在工作过程中磁路不饱和,不计涡流和磁滞损耗;气隙均匀,磁场为方波,定子电流、转子磁场分布皆对称,电枢绕组在定子内表面均匀连续分布;忽略电枢效应、齿槽效应。

图4 导通状态图
在以上假设条件下,可以得到无刷直流电机的数学模型如下:
利用基尔霍夫电压定律(KVL)可以得到三相绕组的电压平衡方程:
其中:uA、uB、uC为定子相绕组电压(V);iA、iB、iC为定子相绕组电流(A);eA、eB、eC为定子相绕组电动势(V);R为电机相电阻;L为每相绕组的自感(H);M为每两相绕组间的互感(H)。p为微分算子,p=d/dt。由绕组电压方程可知,无刷直流电机的等效电路如图5所示。

图5 无刷直流电机的等效电路图
2.3 电子油泵电机的位置传感器
无刷直流电机采用霍尔式位置传感器来完成转子位置确定和转速反馈。霍尔式位置传感器利用了电流的磁效应原理,即通电的半导体介质在外磁场的作用下会产生新的电场。如图6所示,转子带动传感器磁圈运动,在HALL IC中产生相应电场。
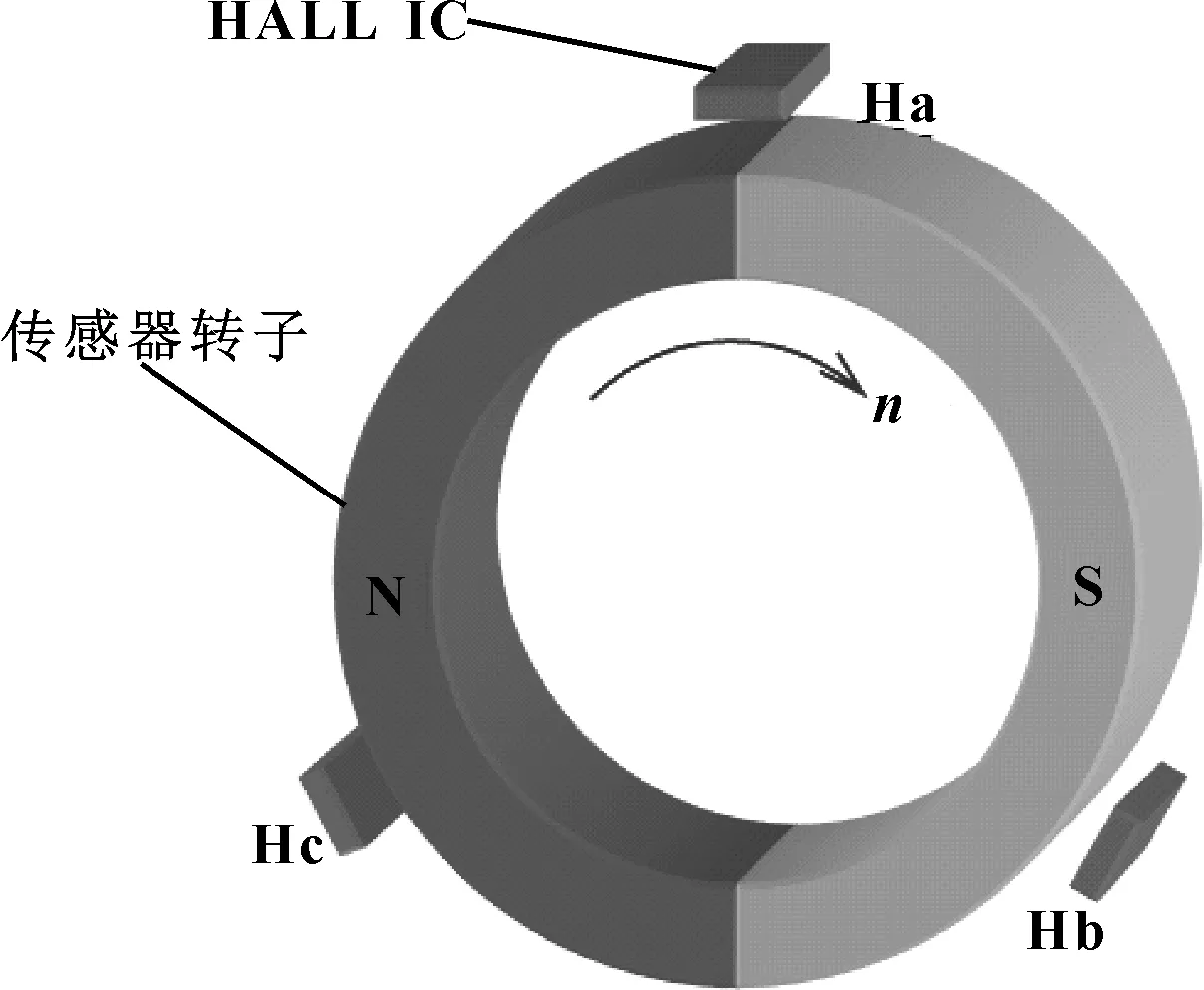
图6 霍尔传感器原理图
如表1所示:6个MOS管V1~V6按照传感器反馈的霍尔信号值进行导通,从而实现BLDC电机正转与反转精准换相。
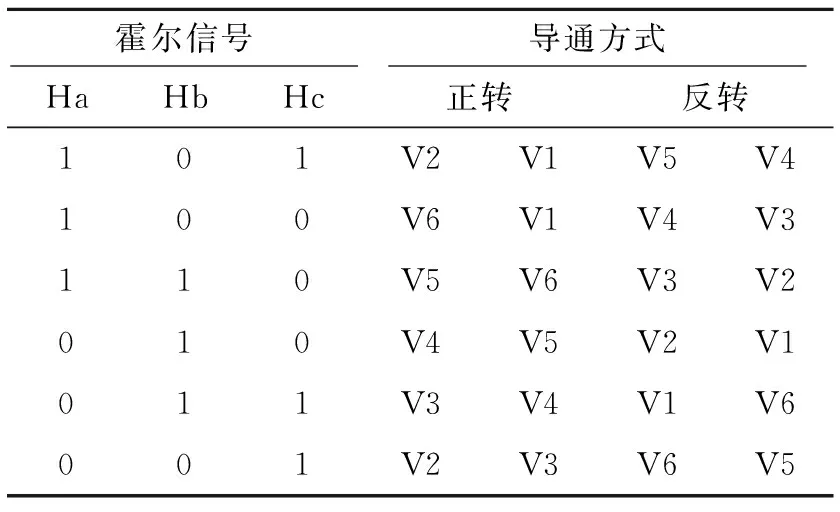
表1 电子泵电机控制真值表
注:V1~V6 分别表示驱动电桥电路中对应的6个MOS管。
2.4 电子油泵电机控制方式
基于液压系统需求,需要电子油泵泵出足够的油来平衡泄漏量以达到增加油压的目的,所以对油泵电机采用转速控制的方式。
假设某时刻,电机处于A+B-的导通状态下,此时的电机电压平衡方程为:
稳态时,有:
iA=-iB=const
则有:
U-2ΔU=2RiA+Ken
根据上式,可得BLDC的调速方程:
其中:Ke为平均反电动势系数;ΔU为功率管压降;KT为平均转矩系数。
2.5 电子油泵电机控制算法
控制算法中如果只采用转速闭环控制,在升速调节过程中电压突然增加,而转子由于惯性原因不会转速突变,速度负反馈也不会突变,这样驱动电流会突然快速上升,造成电流冲击。因此,一般采用速度-电流双闭环控制系统。如图7所示:以速度控制为外环、电流控制为内环,以实现平稳调速。

图7 速度-电流双闭环控制系统
2.6 电子油泵电机控制过程
电子油泵电机负载起动或负载突变(扰动)时,调节过程分为3个阶段:(1)起动(或扰动);(2)加速;(3)调节至转速稳定。
调节过程中,电枢电流Id、转速n、目标转速ng、负载电流IL如图8所示。

图8 转速调节过程
在转速-电流双闭环控制系统中,速度调节器用于实现快速转速调节,并在保障调速精度的同时,使得电机机械特性较硬,满足负载需求,输出限值取系统允许最大电流(过流保护);电流调节器用于实现调速的快速动态特性,并满足负载转矩要求,限值取自触发角的移相范围。
3 结束语
电子油泵电机采用转速-电流双闭环控制系统可以极好地适应液压系统的扰动带来的负载突变过程,能够快速达到稳态。而且应用电路简单,易于实现,体积小。在后续研究中还可加入油压-电流特性控制,以达到液压系统精确调节主压力的控制需求。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
莆田学院学报(2021年5期)2021-11-13
汽车实用技术(2021年18期)2021-10-11
应用能源技术(2021年7期)2021-08-03
科学与财富(2020年24期)2020-10-27
科技与创新(2019年23期)2019-12-19
速读·下旬(2019年3期)2019-04-11
电子制作(2019年23期)2019-02-23
汽车维修与保养(2018年9期)2018-12-06
电机与控制学报(2018年9期)2018-05-14
