
视觉传感器抖动模糊图像复原技术*
2018-08-03 03:14朱立夫燕必希董明利
传感器与微系统 2018年8期
朱立夫, 燕必希, 王 君, 董明利, 孙 鹏
(北京信息科技大学 光电测试技术北京市重点实验室,北京 100192)
0 引 言
运动模糊图像对视觉传感器的研究应用带来很多不便[1~3]。因此,运动模糊现象的消除和模糊图像复原技术的研究具有重要意义。视觉传感器采集的图像中,模糊图像的复原均为估计出点扩散函数(point spread function,PSF)描述[4,5],利用PSF求得原始图像。运动模糊图像复原技术以匀速直线运动水平方向模糊模型为基础[6]。
Cannon M等人[7]通过对匀速直线运动模糊图像频谱图进行分析,证明了频谱图中条纹方向与运动方向垂直这一特性。黄超等人[8]在频域中引入傅里叶频谱,利用梯度变化代替检测转换点来计算角度和长度,但计算角度和长度精度较低。朱建国等人[9]研究了Radon变换和梯度倒谱的基本原理,利用该原理估算模糊角度和模糊长度,但其模糊长度估计误差较大。Lokhande R等人[10]利用霍夫变换对条纹进行方向鉴别,由图像一阶微分自相关得出模糊长度。但该方法需要利用Data cursor手工选择,误差具有随机性。上述方法均不能够准确有效地估计PSF。
本文提出一种针对视觉传感器匀速直线运动水平方向模糊模型,能够准确有效地估计模糊参数。利用Lucy-Richardson迭代算法对运动模糊图像进行复原,实验表明该方法对模糊参数的估计具有较高精度,利用该模糊参数对视觉传感器采集的图像进行复原具有良好的效果。
1 运动模糊数学模型
根据有限的先验知识从运动模糊图像中求取图像退化信息[11],反向获得复原图像。建立系统的退化模型如图1。

图1 运动图像退化模型
图中g(x,y)表示模糊图像,f(x,y)表示原图像,H表示点扩散函数h(x,y)的传输函数,n(x,y)表示系统噪声。
运动模糊图像可由原始图像与传输函数进行卷积形成
g(x,y)=f(x,y)*h(x,y)+n(x,y)
(1)
(2)
式中L为模糊长度;θ为模糊方向。忽略噪声的影响,将式(2)代入式(1)并傅里叶变换,有

(3)
式中G(u,v),F(u,v)为g(x,y),f(x,y)的傅里叶变换。可以看出,只要确定模糊方向θ和模糊长度L,即可确定运动模糊参数模型。
2 PSF参数估计
2.1 模糊长度L估计
在运动模糊图像中,视觉采集的图像中,运动方向上大部分模糊图像的背景像素点具有很强的相关性[12],即沿着运动模糊的方向,模糊背景像素点的灰度值会逐渐变化或者不变。因此,首先对模糊图像进行一阶微分,并作自相关运算,对相关曲线每列像素的上下边界值求和,确定模糊长度。具体估计方法为:
1)如图2,利用Fspecial函数对原始图像进行退化处理,获得运动模糊图像的参数为:L=90 pixel,θ=40°。

图2 预处理分类示意
对图2(b)灰度化处理,并运用Sobel算子对灰度图像进行一阶微分运算,Sobel算子为

(4)
2)自相关运算。
自相关曲线如图3(a)所示。曲线上两个对称的相关峰(峰值为负)间的距离即为模糊长度。对曲线中每列像素点的2个上下边界值求和,得到求和函数曲线如图3(b)所示。根据图3(b)求取求和函数曲线的最小值,其中2个等大最小值的像素差值即为模糊长度L的值。最终得出L=90 pixel。利用相同方法对其他模糊长度值的长度(实际范围为10~160 pixel)进行了估计,测试数据表明,模糊长度测量值与实际值相比较,绝对误差不超过1 pixel,因此,该算法能准确地估计模糊长度。

图3 自相关曲线
2.2 模糊角度θ估计
对运动模糊图像方向与其频谱亮条纹的方向研究后发现,模糊角度的取值范围在0°~179°之间,且图像的运动模糊角度与其频谱图亮条纹在角度上呈垂直关系[13],即方向角度相差90°。因此,能够反映出图像的运动模糊方向。具体估计步骤为:
1)对图3进行二维离散傅里叶变换,变换图像如图4(a)所示。

图4 二维离散傅里叶变换
2)对频谱图中白色条纹进行二值化处理并作腐蚀运算,以消除杂散点,结果如图4(b)所示。以图4(b)图像行和列的中心像素点为起点,以带宽为10 pixels,将图像的像素赋值为黑色,消除白色线条的影响,得到白色条纹图像,如图5所示。
3)运用最小二乘拟合对图像中白色像素点进行拟合求取拟合直线斜率,如图6所示。与该斜率相垂直的直线斜率即为模糊角,模糊角度的取值范围在0°~179°之间。
采用相同方法对其他模糊角度值的角度(实际角度范围为10°~90°)进行了估计,数据表明,该算法能精确识别出运动方向,只有角度接近于0°或者90°时,识别的绝对误差值最大为1°。

图5 白色条纹图像

图6 最小二乘拟合直线
将估计结果与运动模糊参数估计中较高精度文献作对比,文献[6,9]、本文方法求取模糊长度L测量绝对误差分别为2,1,1 pixel,求取模糊角度θ误差分别为2°,2°,1°,表明本文方法具有更高的精度。
3 图像复原
本文采用Lucy-Richardson算法[14],通过原始图像转化模糊图像的先验知识,采用最大似然估计法来估计出最佳原始图像。
采用图3,模糊长度为90 pixel、模糊角度为40°的图像,运用求得的PSF参数分别对传统复原方法逆滤波、维纳滤波和盲去卷积滤波进行模糊复原处理[15],处理结果如图7所示。Lucy-Richardson滤波进行模糊复原处理,恢复图像如图8所示。
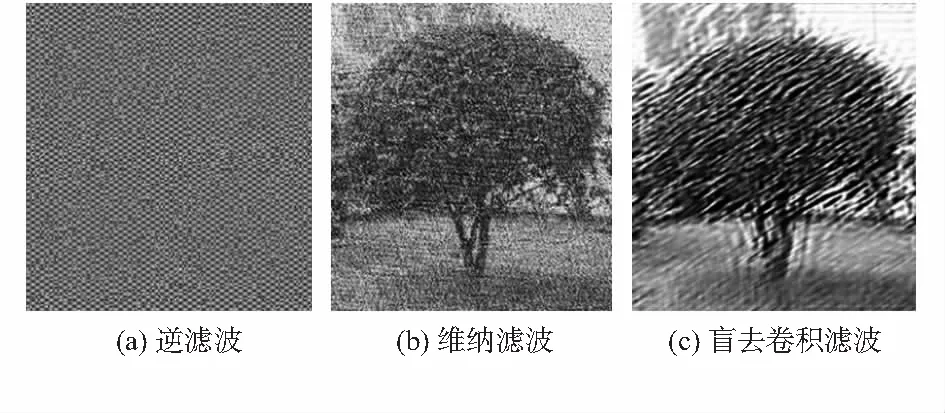
图7 传统复原方法

图8 Lucy-Richardson滤波恢复图像
根据图7和图8可以看到传统复原方法恢复效果明显差于Lucy-Richardson滤波复原方法,Lucy-Richardson滤波复原方法能够明显的恢复模糊图像,且图8表明,随着迭代次数的增加,图像的恢复效果越明显。
4 结束语
对视觉传感抖动模糊图像复原技术进行了研究。实验表明,当视觉传感器的工作环境存在影响的情况下,依然可以根据算法后续处理,补偿视觉传感器采集图像信息不足的问题。
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20
陶瓷学报(2020年6期)2021-01-26
现代电子技术(2021年1期)2021-01-17
紫禁城(2020年8期)2020-09-09
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
航天返回与遥感(2014年4期)2014-07-31
长江大学学报(自科版)(2014年7期)2014-03-20
