
用于微振动控制的主动隔振单元的研究
2018-08-02 01:55潘公宇肖文强
振动与冲击 2018年14期
潘公宇, 陈 磊, 李 东, 肖文强
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
随着精密制造技术和微测量技术的快速发展,微振动的控制技术已成为一个十分重要的研究课题。2015年颁布的国家标准《电子工业防微振技术规范》(GB51706—2015)规定了精密装置和仪器的容许振动值[1],对于一般透射电镜及扫描电镜而言,容许的振动速度为6 μm/s,对于纳米研发装置其容许的振动速度更要小于0.78 μm/s。要达到这样的微振动水平,通常所采用的被动隔振技术难以达到这一目标[2-6]。
本文利用空气弹簧低频减振特性良好的特点,提出了一种用于微振动控制的主动隔振单元,并利用该隔振单元构建了6自由度减振平台系统[7-10],建立了系统的运动微分方程式,并对系统在最优控制下的性能进行了仿真和实验研究,结果表明:与被动模式相比,主动作用模式下的减振效果到达了20 dB,所提出的主动隔振单元及其减振平台不仅对中高频扰力具有良好的隔振效果, 而且对低频和超低频扰力能进行有效的隔振。
1 主动隔振单元的概要
主动空气隔振单元如图1所示,主要包括气源、气阀、垂直空气弹簧、水平空气弹簧、隔振单元内部垂直加速度传感器、水平加速度传感器、垂直位移传感器、水平位移传感器、地面垂直加速度传感器、地面水平加速度传感器等。隔振单元内部加速度传感器及位移传感器测量隔振单元上部精密设备的振动信号,地面加速度传感器测量地面对精密设备的输入信号,外部的控制器根据测量的实时信号,对气阀进行充放气,从而改变垂直空气弹簧及水平空气弹簧内部的压力,产生实时的主动控制力来消除主动空气隔振单元上部精密仪器的振动。
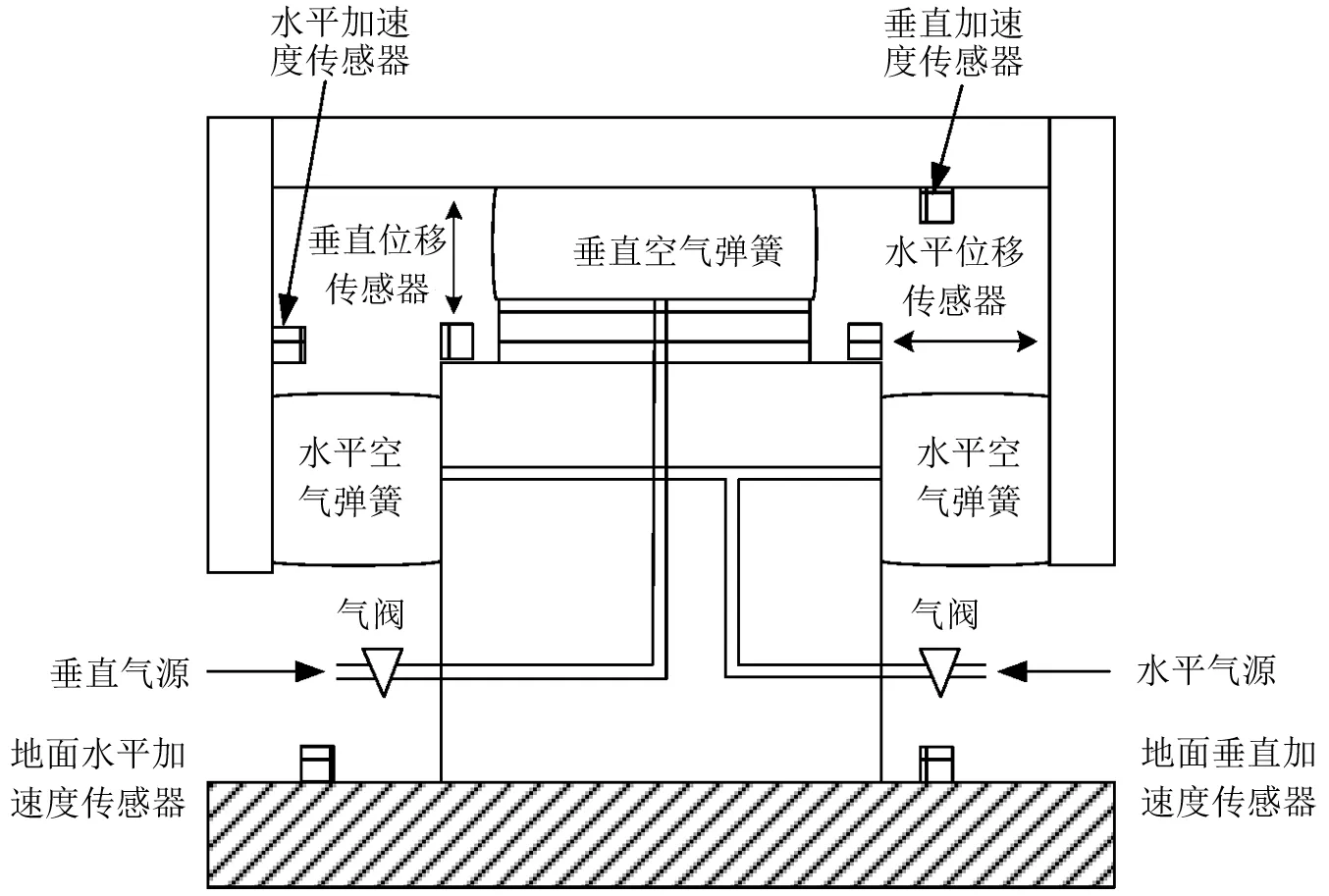
图1 主动空气隔振单元示意图Fig.1 Schematic diagram of active air isolation unit
2 减振平台及其建模
由上述4个主动隔振单元构成的精密减振平台如图2所示,在4个主动隔振单元中,有4个控制Z方向的空气弹簧,有2个用于控制X方向的空气弹簧,有2个用于控制Y方向的空气弹簧。这8个空气弹簧产生的力形成的力矩又可以控制绕X,Y,Z方向的转动。
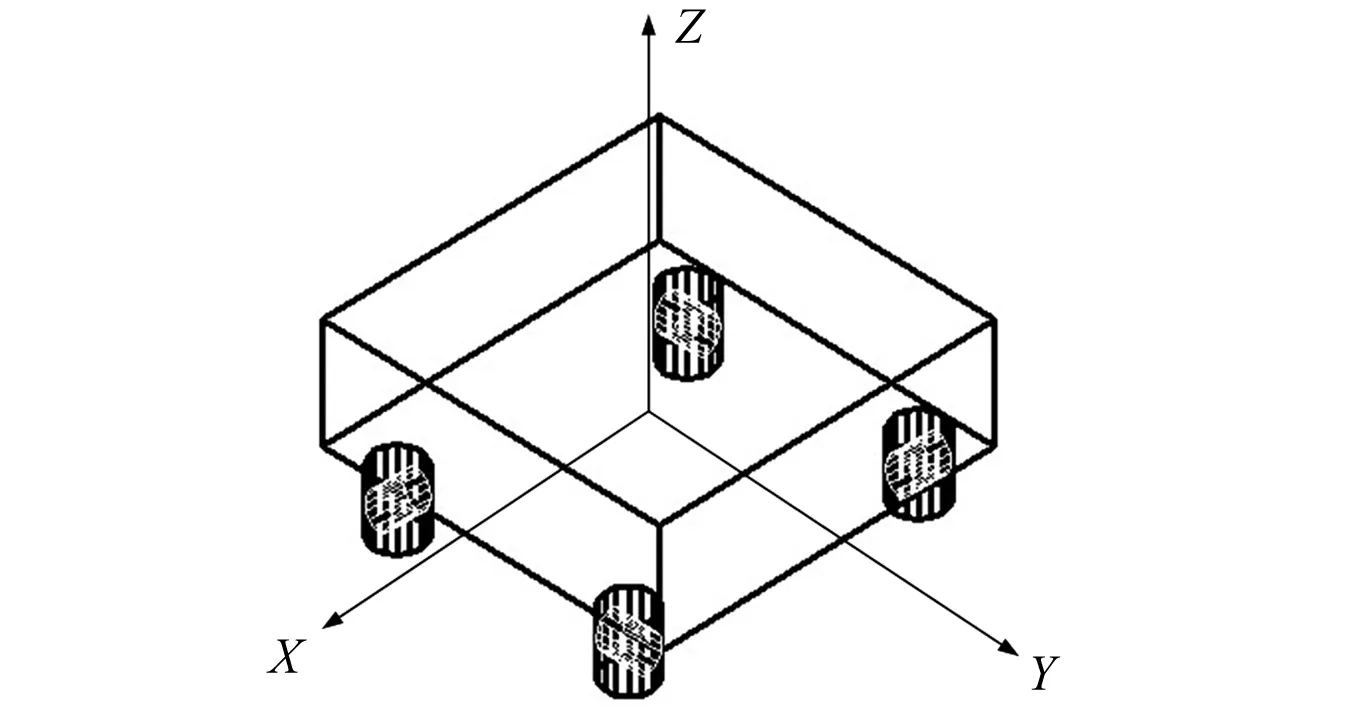
图2 精密减振平台示意图Fig.1 Schematic diagram of precision vibration isolation platform
该系统的运动微分方程可表示为下列6自由度方程:
(1)
式中:[M]为质量矩阵(6×6);[C]为阻尼矩阵(6×6);[K]为刚度矩阵(6×6);{x}为绝对位移矢量(6×1);{x0}为基础干扰位移矢量(6×1);{u}为空气气阀的控制电流矢量(8×1);[Ka]为考虑促动器到安装位置时,所有空气气阀的输出力因子矩阵(6×8)。
系统的状态方程式如下:


一般来说,隔振系统的动力学方程式(1)是耦合方程,但当阻尼矩阵为对角矩阵的情况下,该方程可以解藕,可表示为:

3 控制器的设计

Ju=E[xT(t)Q0x(t)+
式中:Q0,Q,R分别控制目标终值项加权矩阵、积分项加权矩阵及控制力的加权矩阵。
根据分离定理,随机最优控制律为

先按确定性最优控制问题得到的反馈增益矩阵L为
L=R-1BTS
式中:S可以通过求解以下控制器的Riccati代数方程得到
SA+ATS-SBR-1BTS+Q=0


式中,K为估计增益矩阵
式中,P满足估计器的Riccati代数方程
4 仿真及实验结果
利用MATLAB可以对上述所建立的精密平台进行地面干扰下的频率特性仿真,图3~图8分别表示了在6个自由度方向上的频率响应特性,其中实线为主动控制下的性能,虚线为不进行主动控制下的性能,对比曲线表明所设计的主动振动控制系统能在低、中、高非常宽的频率范围内有效地抑制基础干扰所引起的振动。
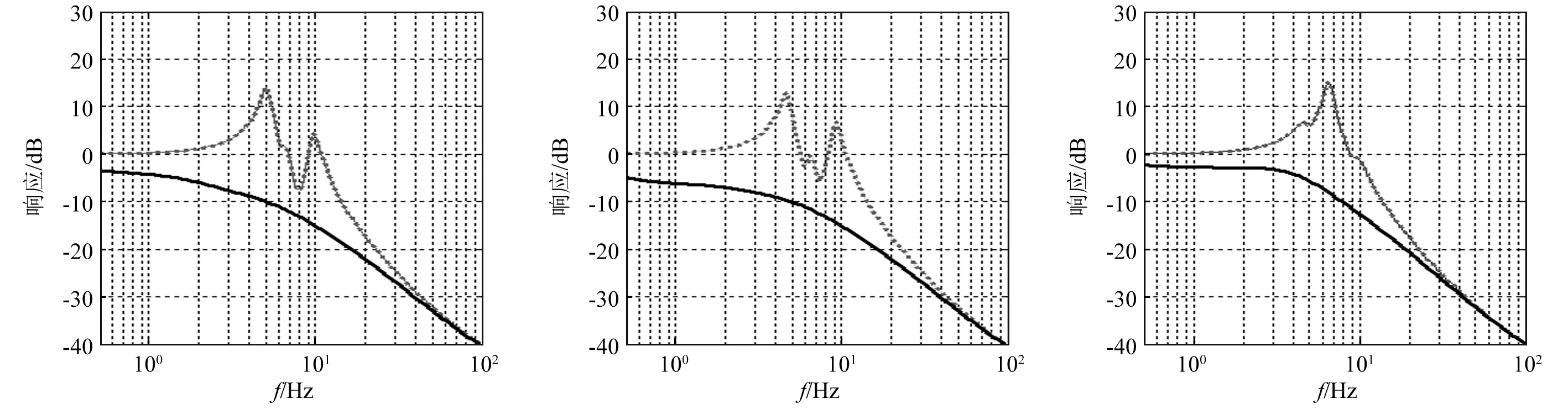
图3 X方向的主动及被动控制下的传递函数 图4 Y方向的主动及被动控制下的传递函数 图5 Z方向的主动及被动控制下的传递函数 Fig. 3 X direction’s passive and active transmissibility Fig. 4 Y direction’s passive and active transmissibility Fig. 5 Z direction’s passive and active transmissibility
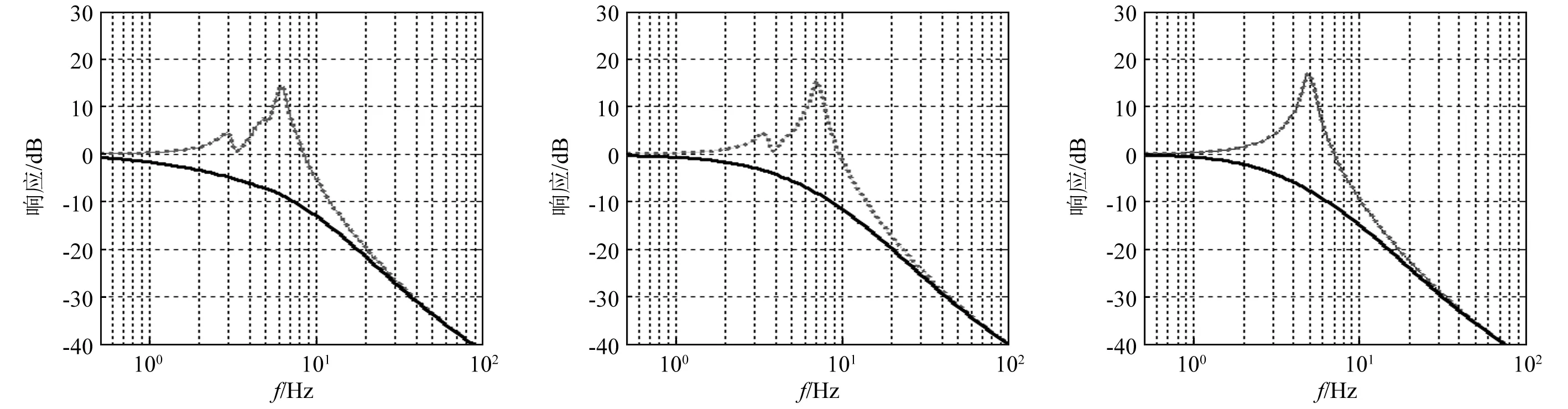
图6 Xt方向的主动及被动控制下的传递函数 图7 Yt方向的主动及被动控制下的传递函数 图8 Zt方向的主动及被动控制下的传递函数Fig.6 Xt direction’s passive and active transmissibility Fig. 7 Yt direction’s passive and active transmissibility Fig.8 Zt direction’s passive and active transmissibility
实验系统主要由主动促动单元、加速度传感器、空气源、控制器、信号放大器、功率放大器和动态信号分析仪等组成,实验示意图如图9所示。实验测得的X,Y,Z三个方向的频率传递特性如图10所示。比较实验结果和仿真结果,可以发现在被动模式下两者在X,Y,Z方向的固有频率以及固有频率下的峰值都几乎相等,具有良好的一致性,说明仿真模型能很好地反应系统的特性;在主动控制模式下,实验得到的减振效果比仿真的结果更好,这是因为在实验时系除了有反馈的最优控制外,还加上了地面振动的前馈控制。
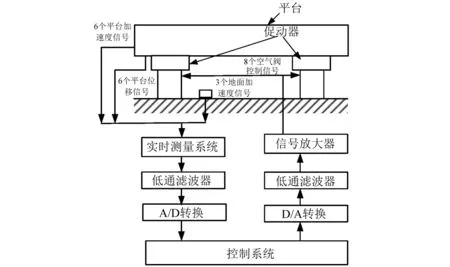
图9 实验示意图Fig.9 Schematic diagram of experiment
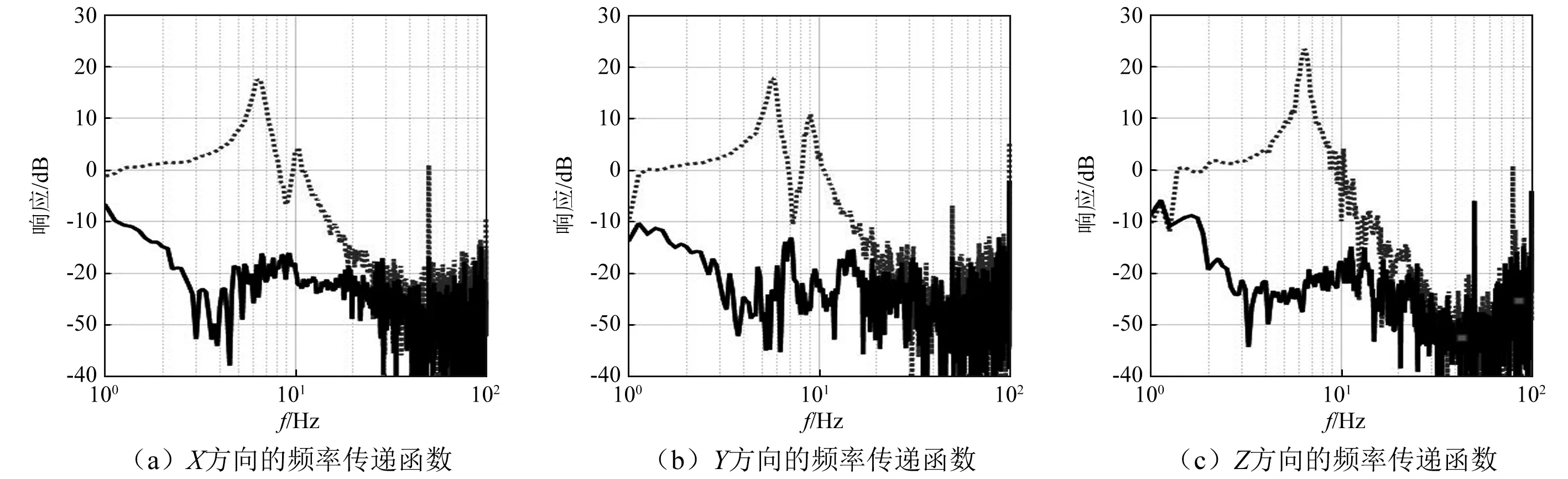
图10 三个方向的频率传递函数的实验结果Fig.10 Experimental results of three direction transmissibility
图11为实验时测得的地面及精密平台上的振动值。该图的横坐标(垂线对应的值)为振动频率(单位Hz),垂直纵坐标(横向水平线对应的值)为振动的速度大小(单位cm/s),由左下向右上的斜线为振动的位移大小,由左上向右下的斜线为振动的加速度大小。由图中振动曲线可以看到:如果没有精密平台,精密设备在X方向所处的最大振动环境为4.5 μm/s;而装有主动隔振单元的精密平台后,精密设备的所处的最大振动环境仅为1.1 μm/s;同样,如果没有精密平台,精密设备在Y,Z方向所处的最大振动环境分别为3.8 μm/s和2.2 μm/s;而装有主动隔振单元的精密平台后,精密设备的所处的最大振动环境仅为0.78 μm/s和0.4 μm/s。系统的实际最大减振效果到达了20 dB左右。反映出采用主动隔振单元的精密平台具有良好的减振效果,能满足较为严格的微振动环境需要。
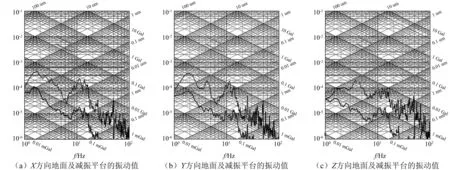
图11 减振系统在X,Y,Z三个方向的效果Fig. 11 The effect of isolation system on X,Y,Z direction
5 结 论
本文利用空气弹簧低频减振特性良好的特点,提出了一种用于微振动控制的主动隔振单元,并利用该隔振单元构建了六自由度精密减振平台系统,建立了系统的运动微分方程式,并对系统在最优控制下的性能进行了仿真和实验研究,仿真及实验得到的频率响应特性和实测的振动结果表明:所提出的主动隔振单元具有实用性,所构建减振平台具有良好的减振效果,系统的实际最大减振效果到达了20 dB左右,能满足较为严格的微振动环境需要,具有较高的理论和实用价值。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
计算机应用(2022年2期)2022-03-01
模具制造(2022年1期)2022-02-23
计算机应用(2021年4期)2021-04-20
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
计算机应用(2021年1期)2021-01-21
水泥工程(2020年4期)2020-12-18
新高考·高一物理(2016年10期)2017-07-07
小天使·一年级语数英综合(2015年2期)2015-01-14
