基于实际工程及虚拟装置的直流输电控制保护模型设计方法
2018-07-26 05:56柏传军程璐璐肖建民
电力系统自动化 2018年14期
柏传军, 叶 周, 程璐璐, 肖建民
(南京南瑞继保电气有限公司, 江苏省南京市 211102)
0 引言
中国电网已进入大区互联、特高压交直流混合输电时期,高压/特高压直流输电容量所占能源基地及负荷中心容量比重大,且多回直流落点电气距离近,相互作用较强。准确地仿真高压/特高压直流输电系统,对于研究交直流电网的动态特性意义重大。
交直流大电网的仿真方法包括全机电暂态仿真、全电磁暂态仿真及机电电磁混合仿真[1-5]。全机电暂态仿真不能模拟高压直流等大容量电力电子系统快速变化的电磁暂态过程,无法精确描述交直流系统间的相互作用,不能准确反映复杂控制保护特性对事故发展和全系统稳定性的影响,难以在所有情况下实现交直流大电网的准确仿真[1]。全电磁暂态仿真和机电电磁混合仿真又分为实时仿真和非实时仿真。对于实时仿真,可通过接入简化的实际工程控制保护系统,实现直流系统的精确仿真,该方案是仿真直流输电系统最为有效的方法,但物理的控制保护系统十分复杂,购置成本、后期的使用及维护成本都较高,且硬件无法复制,多个项目组无法同时使用。现有的电磁暂态仿真软件,如PSCAD/EMTDC[5],ADPSS[5],Hypersim[6],EMTP-RV[7],虽然集成了直流输电控制系统功能符号或算例,但与实际工程的控制保护系统相比仍有很大的差距,如缺少换流变压器分接头控制、无功控制、双极功率控制、在线运行控制、直流保护等重要功能,并且完全不具备国内特高压双阀组串联、分层接入系统结构相关的控制保护功能。因此,开发功能完备、特性准确的直流控制保护模型就显得非常必要。
文献[8]以自定义方式建立了一套基于直流工程所用ABB型控制器的控制系统PSCAD/EMTDC模型,但其仍是在对控制器做了较大简化基础上构建的模型,控制功能不完善且无保护功能。文献[9]提出一种在PSCAD/EMTDC中等效实现直流控制保护工程软件在工控机中的分时处理、中断计算过程的方法,但其要在PSCAD/EMTDC开发一套与工程直流控制保护软件对应的基本功能符号,再按照实际工程逻辑,在PSCAD/EMTDC软件中利用基本功能符号重新搭建控制保护逻辑。该方法无法复用经过严格测试验证的工程程序,开发工作量巨大且难以保证正确性。文献[10-11]基于ABB的MACH2平台及Hidraw图形化开发工具,建立了包含详细直流控制保护功能的PSCAD/EMTDC模型,其控制保护系统基于整体构建,该方案可用于由少量控制保护装置构成的简单系统,却难以适应如特高压直流[12]、多换流器并联直流[13]、双回直流等结构复杂且装置数量多的控制保护系统,也无法适应集成多厂家装置的控制保护系统,同时无法实现多核并行计算。
本文提出一种基于实际直流工程控制保护程序,遵照实际控制保护系统逻辑结构,以虚拟装置为核心,构建功能完善、准确性高、适用于多种电磁暂态仿真软件,且适合于并行计算的控制保护仿真模型设计方法。将仿真结果与理论计算结果、实际工程系统试验波形进行对比,验证了仿真模型的准确性,并实现了模型多CPU并行仿真,仿真速度可以达到实时。
1 控制保护仿真模型逻辑结构及功能
1.1 仿真模型的逻辑结构
国内现有特高压直流工程均为双阀组串联结构,单个换流站控制保护系统的逻辑结构见图1。

图1 直流控制保护系统逻辑结构Fig.1 Logic structure of DC control and protection systems
特高压直流控制保护系统包括换流器控制保护、极控制保护、站控制3个层次。对于单阀组结构的高压直流工程,不设置换流器控制保护层,相应功能合并在极控制保护层。同一层次内按控制保护的一次设备对象不同划分为不同区域,如极控制保护层分为极1控制保护和极2控制保护。
站控制层包括控制装置,极控制保护层及换流器控制保护层则包括控制装置和保护装置。实际工程的控制保护系统为了保证可靠性,控制保护装置设置A/B双系统冗余,部分直流保护系统设计了3套保护,并在保护出口设置了3取2措施。
同一个区域内的控制装置和保护装置之间、不同区域装置间、不同层次装置间、冗余系统A与B装置间均有信号交换;运行人员工作站(OWS)与各控制保护装置间均有信号交换;控制保护装置与图中未画出的输入/输出(I/O)设备也有大量的信号交换。这些信号交换通过局域网(LAN)和控制器局域网(CAN)等通信通道完成。
由此可见,实际工程的控制保护系统结构以控制保护装置为核心构建,整个系统的控制保护功能按层级、区域合理地划分到各个控制装置或是保护装置中,装置内功能高内聚、装置间低耦合,因此以实际装置在仿真模型中的映射即“虚拟装置”为核心,采用与实际工程一致的逻辑结构构建控制保护模型,是一种合理且有效的方法。以“虚拟装置”为核心,适用于多厂家装置构成的控制保护系统,并且便于控制保护模型的扩展,如一次系统扩建为双换流器并联、扩建为多端、增加多回协控[14]时,控制保护模型增加相应的虚拟装置及与现有虚拟装置的接口即可。
本文的控制保护仿真模型采用与工程控制保护系统完全一致的逻辑结构,但不考虑实际物理控制保护系统的各种容错设计,所有控制保护层均为单系统即单套虚拟装置;各通信环节简化为信号的直连,或者经过具备模拟延时和故障特征的通道模拟环节进行连接;控制保护系统与一次系统间的输入/输出设备简化为直接连接。
利用该逻辑结构在支持多核并行计算的仿真软件如Hypersim和ADPSS中建立直流控制保护模型,以层、区域作为边界,将虚拟装置分配到多个CPU核心中进行并行计算,可以大幅度提高仿真的速度。
1.2 控制保护仿真模型的功能
仿真模型完全按照实际特高压直流控制保护系统的层次结构和功能,构建对应的控制和保护虚拟装置。
换流器控制保护层包括换流器控制虚拟装置和换流器保护虚拟装置。主要控制功能包括:换流器触发控制、定电流控制、定关断角控制、直流电压控制、换流器电压控制、换流器电压平衡控制,以及换流器单元闭锁和解锁顺序控制。主要保护功能为换流器区域的保护。
极控制保护层包括极控制虚拟装置和极保护虚拟装置。主要控制功能包括:计算电流电压指令提供给换流器控制层、双极功率控制、单极功率控制、极间功率转移控制、两极电流平衡控制、极启动和停运控制、故障处理控制(包括移相停运和自动再启动控制)、低压限流控制、开关刀闸的顺序控制。主要保护功能为极区、双极区、直流线路区等区域的保护。站控制层包含站控制虚拟装置,其主要控制功能有:直流场开关刀闸的顺序控制、交流滤波器控制。OWS则实现直流运行控制,主要功能包括:设定参考值及控制参数、设定控制方式、发送控制指令等。模型中OWS由仿真软件自带的模型控件、常数等符号搭建,以给定直流控制保护系统的控制设定,同时在模型运行过程中可在线改变这些控制设定。
2 虚拟装置的实现原理
2.1 虚拟装置的调度程序
各厂家的直流控制保护系统软件一般采用图形化开发工具进行开发,图形化开发工具包括硬件配置、控制保护软件开发、编译下装、功能符号开发、工程管理、通信组态等一系列功能。南瑞继保PCS9550[15]直流控制保护系统软件由自主研发的图形化开发工具ACCEL[16]完成开发,单个装置程序的逻辑结构如图2所示。
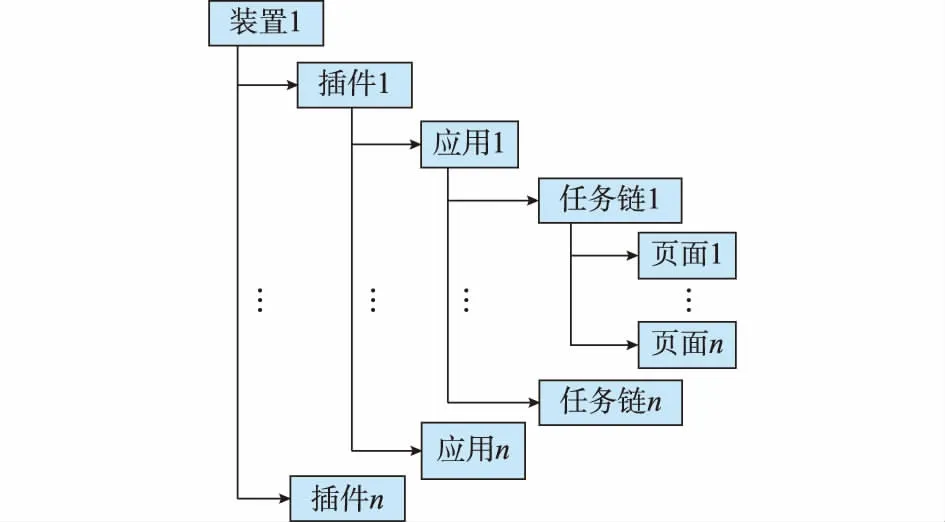
图2 直流控制保护装置的逻辑结构Fig.2 Logic structure of DC control and protection device
每个装置由多个插件构成,每个插件上运行多个应用,每个应用由不同执行周期的多个任务链构成,每个任务链有多个页面的程序,每个页面程序为图形化功能符号构建的控制保护逻辑。
实际装置插件上的时钟芯片产生实时时钟,作为程序运行的时间基准;插件上的硬件定时器根据任务链设定的执行周期产生时间中断,中断服务程序则负责按照固定顺序执行相应任务链的所有程序页面。
对于虚拟装置,需要模拟这一调度机制。为此,对仿真程序专门开发了调度程序以模拟装置的程序运行机制。
调度程序主要包含两部分功能:①调度程序以仿真软件的仿真时间作为虚拟装置的时钟,以保证程序中与时间相关的功能符号如延时、展宽等符号程序的正确执行;②调度程序遍历装置各个插件应用的所有任务链,以仿真时间为基准,当仿真时间与任务链执行周期整数相除的余数小于仿真步长时,则在当前仿真步长内执行该任务链,以保证与执行周期严格相关的功能,如数字滤波、离散傅里叶变换(DFT)、数字比例—积分(PI)控制器等程序正确执行。调度程序最终以函数run(time,timestep)形式实现虚拟装置的运行,其中time和timestep分别为仿真软件传入的仿真时间和仿真步长。
2.2 虚拟装置的输入/输出
每个虚拟装置需要与其他虚拟装置、一次系统和OWS等进行信号交换。在虚拟装置程序中增加虚拟输入/输出插件,将装置与外部所有信号交互修改为通过虚拟输入/输出插件进行。
虚拟输入/输出插件设置唯一的应用,在该应用上设置多个执行周期的任务链,任务链执行周期根据原有通信程序页面所处任务链周期设置。在虚拟板卡上开发了仿真专用的输入/输出符号,这些输入/输出符号通过共享内存读写方式与虚拟装置外部实现信号交互。
2.3 虚拟装置程序库的实现过程
虚拟装置程序的开发基于图形化开发工具,其与实际装置程序开发过程对比如图3所示。

图3 虚拟装置程序库开发过程Fig.3 Development procedure of virtual device library
直流控制保护仿真程序由图形化的工程程序简化及修改而来。简化的部分主要包括:①系统可靠性相关的程序,如硬件自检、系统切换、通信校验、采样校验;②数据采集上送、告警、装置录波相关程序;③顺序控制功能及保护程序中的启动程序。修改的部分主要包括:①增加虚拟输入/输出板卡;②增加启停极及功率升降加速功能,包括交流滤波器投切的加速及换流变压器挡位调节的加速,以匹配仿真中远大于实际工程的功率升降速度。这些简化及修改并不会影响到仿真模型控制保护的功能和性能。
图3中,“代码生成器1”将图形化的工程程序翻译生成目标硬件平台的编程语言源代码(C语言、汇编语言等),“代码生成器2”将图形化的仿真程序翻译生成仿真软件运行环境(Windows或Linux)下的标准C语言代码。
工程程序生成的代码由嵌入式编译器编译链接为实际装置的运行程序。仿真程序生成的代码由仿真软件运行兼容的编译器编译为虚拟装置程序库:PSCAD软件为静态库,Hypersim及ADPSS软件为动态库。
使用经过出厂试验、联调试验、现场试验验证的工程程序生成虚拟装置程序库这一方式,无需在模型中重复开发复杂的控制保护逻辑,不仅大幅度简化了控制保护模型开发及测试难度,也最大限度地保证了模型的功能完备性及特性精确性,同时控制保护逻辑独立于特定的仿真软件,便于控制保护模型快速移植到不同的仿真软件中。在实际工程控制保护系统数十年的设备使用期内,任何工程程序的变动都可以通过替换仿真程序相应页面更新虚拟装置程序库实现,大幅度降低了模型更新维护工作量。
2.4 虚拟装置符号及输入/输出符号
PSCAD和Hypersim等仿真软件均有用户自定义符号功能,根据各软件的自定义符号开发规则,开发虚拟装置符号,实现对虚拟装置库函数的调用。同一个直流工程中,包含极控制、极保护、换流器控制、换流器保护等多个不同功能类型的装置,同一功能类型装置也有多台分布在各站、各极、各换流器,且不同直流工程控制保护程序都是专门设计的,不具有通用性。为实现虚拟装置符号的通用性,给该符号设置了一组参数,包括Hvdc_No,Type,Sta_No,Pol_No,Val_No,以标识区分具体的虚拟装置。PSCAD中利用该组参数,通过fortran接口函数,编译链接到虚拟装置静态程序库中的run函数;Hypersim和ADPSS软件利用该组参数,在虚拟装置符号的初始化函数中,动态载入相应装置的run函数。在仿真运行中的每个步长,虚拟装置符号调用一次run函数,实现虚拟装置的运行。
另外设计了一组输入/输出符号,包括浮点输入、整型输入、浮点输出、整型输出4种符号。该组符号通过与2.2节虚拟输入/输出插件上的输入/输出符号通过共享内存读写方式,实现虚拟装置对外的信号交互。由于单个虚拟装置同一类型的输入或输出数量较多,同一类型的输入/输出符号需要使用多个,因此该组符号除了包括和上述虚拟装置符号一致的Hvdc_No,Type,Sta_No,Pol_No,Val_No参数外,还增加了一个Index_No参数。
虚拟装置及输入/输出符号见附录A图A1至图A3。利用输入/输出符号,虚拟装置与直流一次系统构成闭环,完成虚拟装置间的通信,并接收OWS的设定及控制,进而构成完整的直流控制保护系统模型。
3 模型仿真与验证
3.1 直流仿真模型
以灵绍特高压直流工程为例,分别在ADPSS,Hypersim,PSCAD电磁暂态仿真软件中构建了完整的特高压直流仿真模型,模型见附录A图A4至图A6。
3个模型的一次系统完全以仿真软件自带符号库中的符号搭建,直流系统参数完全采用工程设计参数,交流侧采用一致的等值电压源。在结构上,一次系统简化了所有的接地刀闸,以及部分隔离刀闸,并将换流站交流母线简化为单母线,简化后的单个换流站见附录A图A7。
3个模型的控制保护系统基于灵绍直流实际工程程序,按前文所述方法进行开发,因此虚拟装置的仿真程序只开发了一次,即复用在3种仿真软件中。
控制保护系统采集一次系统的直流电压电流、交流电压电流、开关刀闸及分接头位置,返回开关刀闸的分合命令、分接头升降命令、触发脉冲给一次系统,构成闭环的直流工程仿真模型。
3.2 稳态运行特性仿真验证
直流输电系统的稳态运行特性是其暂态响应特性的基准,在各种运行方式下,实际工程的控制保护系统均能调节直流系统稳态运行特性,包括直流电压电流、触发角、熄弧角、理想空载直流电压在合理范围内。直流输电系统运行方式由多个控制参数组合决定,主要的参数包括功率方向(正向/反向)、接线方式(大地回线/金属回线)、控制模式(双极功率/单极功率)、电压等级(全压/降压)、功率水平。
以灵州站交流母线电压765 kV,绍兴站交流母线电压510 kV,直流线路电阻6.66 Ω作为系统条件,对仿真模型的稳态运行特性与工程设计规范理论计算出的稳态运行特性进行了比较。
附录A表A1列出了功率正向、双极功率1.0(标幺值)、双极大地回线运行、双极功率控制、全压方式下,仿真与理论计算的稳态运行特性数据。附录A表A2列出了功率正向、单极功率0.5(标幺值)、金属回线运行、单极功率控制、降压运行方式下,仿真与理论计算的稳态运行特性数据。
附录A表A1及表A2中:S1为灵州站,触发角为α;S2为绍兴站,关断角为γ;换流变分接头挡位(TCP)之外的仿真数据为经过100 ms低通平滑滤波之后的数据中值。附录A表A1中S1站ADPSS仿真与理论值的TCP及角度偏差的原因,是由于S1站的分接头控制方式为定α角,角度死区为2.5°,仿真运行恰好处于死区范围内。由表A1及表A2的数据可以看出,仿真模型的稳态运行特性与理论计算结果非常接近。
3.3 暂态特性仿真验证
单个换流器的投入及退出功能是双阀组串联拓扑结构特高压直流控制系统的核心功能之一。以特高压换流器的在线退出为例,在一站换流器退出时,对站需自动退出相应的换流器,两站待退出换流器均以一定速率将触发角移相到90°,之后投入旁通对,发出旁路开关合闸指令,旁路开关合上后,立即闭锁换流器,同时发出触发角移相到164°指令。
以功率正向、双极功率800 MW(标幺值0.1)、大地回线运行、双极功率控制、全压方式下,整流站极1退出高压阀组为例,对比仿真模型试验波形与实际工程系统试验波形,波形对比见附录A图A8至图A11。
如附录A图A8、图A9所示,仿真模型与实际工程控制保护系统的触发角变化过程基本重合,先移相到90°,待换流器闭锁后再移相到164°。如附录A图A10所示,仿真模型与实际工程的直流电压变化过程基本一致,由800 kV按一定斜率下降为400 kV,伴有一个小的过冲,仿真过冲略大于实际工程。如附录A图A11所示,仿真模型与实际工程的直流电流变化过程基本一致,仿真波形的上升过冲略大于实际工程,该时刻与电压过冲时刻对应。换流器退出后,继续运行的3个换流器转代该退出换流器的功率,直流电流最终由500 A上升为666.7 A。
3.4 并行仿真计算验证
PSCAD软件暂不支持单个仿真模型在多核上并行计算,ADPSS软件暂不支持用户自定义模型页面的并行计算。本文以灵绍直流Hypersim仿真模型为例,验证本文方法开发的模型对并行计算的适用性。
运行PC版本Hypersim软件的目标机工作站为DELL T5810,单CPU架构。CPU为E5-1650 V3,3.5 GHz,6物理核,支持超线程,仿真软件将其识别为12核,其中1核运行Linux操作系统,其他11核可用作仿真计算。灵绍直流模型在单核上仿真100 s、在11个核上并行仿真100 s,所耗费的计算时间如附录A表A3所示。由表A3可以看出,并行计算时仿真速度提升了5倍以上,并且从较长的时间尺度看,实现了超实时仿真(即模型计算时长小于要仿真的系统暂态过程时长),但由于每个仿真步长计算耗时差异大,单个步长最长计算耗时(见附录A图A13)为101.31 μs,大于仿真步长(50 μs),无法实现实时仿真。
在运行SGI版本Hypersim软件的目标机上实现了灵绍直流模型的实时仿真。该目标机为SGI UV300服务器,多CPU架构。CPU为E7-8891V4,2.8 GHz,10物理核,支持超线程,仿真软件将其识别为20核。在该服务器上使用了10个核实现了灵绍直流模型的实时仿真,单个步长最长计算耗时(见附录A图A14)为47.99 μs,小于仿真步长(50 μs)。
4 结语
考虑现有文献提出的模型开发方法,难以满足交直流大电网仿真对直流控制保护模型在功能、精度、速度、多种软件仿真结果可相互校验等多方面的要求,本文提出了一种基于实际工程及虚拟装置开发仿真模型的方法。应用该方法,各控制保护厂家可最大限度地使用工程程序,构建功能完善、准确性高、适合并行、适用于多种仿真软件的控制保护模型。应用该方法,未来还可开发集成多类型(柔性直流、直流断路器、耗能装置等),以及多厂家装置的控制保护系统模型。以灵绍特高压直流工程为例对该方法进行了验证,仿真结果与实际工程波形对比表明模型准确性高,并且模型可实现多CPU并行仿真,在一定硬件环境下可达到实时。
由于虚拟装置库开发需要使用仿真目标机的C语言编译链接器及C标准库,因此本文方法暂不适用于主流的实时数字仿真器(RTDS),未来待该仿真器支持标准C编译链接及提供C标准库后进行本文方法的验证。与一些简化模型的开发方法相比,本文方法对工程程序简化程度小,因此模型计算量大、速度慢,但精确性高,且可通过并行改善仿真速度。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
猜你喜欢
测控技术(2021年10期)2021-12-21
幼儿园(2021年6期)2021-07-28
小学生学习指导(低年级)(2019年11期)2019-11-25
电子制作(2019年11期)2019-07-04
通信电源技术(2018年3期)2018-06-26
小学生导刊(2017年13期)2017-06-15
通信电源技术(2016年5期)2016-03-22
中国学术期刊文摘(2016年2期)2016-02-13
电源技术(2015年11期)2015-08-22
天津科技大学学报(2015年4期)2015-04-16