基于ADAMS和MATLAB联合仿真的 四轮转向汽车模糊控制研究
2018-07-24 11:54石志康
长春大学学报 2018年6期
石志康
(湖北汽车工业学院 汽车工程学院, 湖北 十堰 442002)
随着汽车技术的飞速发展,越来越多的汽车企业都开始对四轮转向技术进行研究设计。四轮转向汽车通过控制汽车侧向运动和横摆运动,提高了转向运动的响应,改善了汽车高速转向时的操纵稳定性和低速转向时的机动灵活性[1]。目前,四轮转向都是在二自由度汽车数学模型的基础上进行控制策略设计,其目的是实现质心零侧偏,提高汽车稳定性。本文在ADAMS/CAR中建立了四轮转向整车模型,并且在Matlab中建立基于模糊反馈控制策略的四轮转向系统,并进行了ADAMS和Matlab联合仿真分析,结果表明模糊控制能有效地提高汽车的操纵稳定性。
1 四轮转向整车多体动力学模型
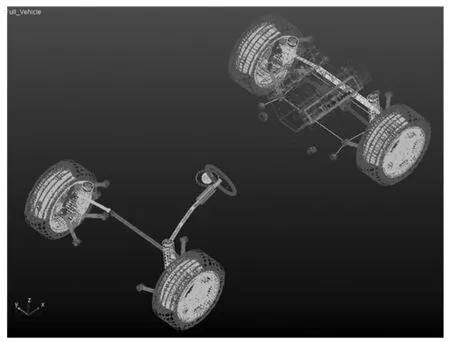
图1 整车模型
本文在ADAMS/CAR中建立整车模型,包括前悬架子系统模板、后悬架子系统模板、动力子系统模板、转向子系统模板、制动子系统模板以及轮胎子系统模板。依次建立各个模板的通讯器,建立各模板相对应的子系统文件,对通讯器进行校核并匹配[2-3],完成后的整车模型如图1所示。
该整车模型的关键之处在于后轮转向模型,它是一个后轮转向的齿条模型,在建立该子系统的时候,在后悬架处添加该齿条模型,使得它通过万向节与后悬架的转向横拉杆相连。齿条套管通过固定副安装在车身上,齿条与齿条套管之间用滑动副连接,并在滑动副上施加一个joint motion作动器,该motion的取值设置为VARVAL(._rear _steering. rear _rack _controller _motion),其中._rear _steering. rear_ rack _controller _motion为状态变量,该状态变量的值设置为0,仿真过程中该值由Simulink控制系统模型进行控制。
2 四轮转向控制系统设计
四轮转向的优点就是在汽车转向时实现后轮的主动转向,改善汽车的操纵稳定性和机动灵活性[4]。本文采用经过简化后的线性二自由度车辆模型,该模型能够满足对其进行动力学分析的基本条件。
2.1 前馈控制器设计
本模型采用比例前馈和模糊反馈控制。四轮转向的控制目标就是使质心侧偏角为零,因此,横摆角速度以一阶惯性传递函数达到稳态[6]。前轮转角比例前馈就是前后轮转角成比例的控制方法,比例系数为k,即:
(1)
式中:a为质心到前轴的距离;b为质心到后轴的距离;L为轴距;m为整车质量;kf为前轮侧偏刚度;kr为后轮侧偏刚度;u为车速。
质心侧偏角用“比例于前轮转角的后轮转角输入控制”进行控制,减小质心侧偏角的同时,横摆角速度增益相对于前轮转向车辆有所降低。虽然质心侧偏角也可以用反馈控制,但是实际上车辆的质心侧偏角是很难获取的参数,为了使仿真具有现实意义,使用前馈控制,而横摆角速度采用反馈控制[7]。
2.2 模糊控制策略设计
车辆的横摆角速度和质心侧偏角是描述车辆运动状态的两个重要指标。但是,车辆质心侧偏角不易测量,而车辆的横摆角速度则可以通过传感器来测量[5-6]。因此,在对模糊控制策略进行设计时,把整车模型输出的实际横摆角速度与参考模型输出的理想横摆角速度的误差E作为一个输入,另一个输入是横摆角速度误差变化率EC,后轮转角补偿量U作为输出变量。
横摆角速度误差E,横摆角速度误差变化率EC和后轮转角补偿量U的论域和模糊变量分别有如下定义:
E的论域是{-6,-6},模糊子集是:{NB,NM,NS,ZO,PS,PM,PB};
EC的论域是{-6,-6},模糊子集是:{NB,NM,NS,ZO,PS,PM,PB};
U的论域是{-3,-3},模糊子集是:{NB,NM,NS,ZO,PS,PM,PB}。
其误差的量化因子ke为1.2,误差变化率的变化因子kec为0.2,输出量的量化因子ku为1。
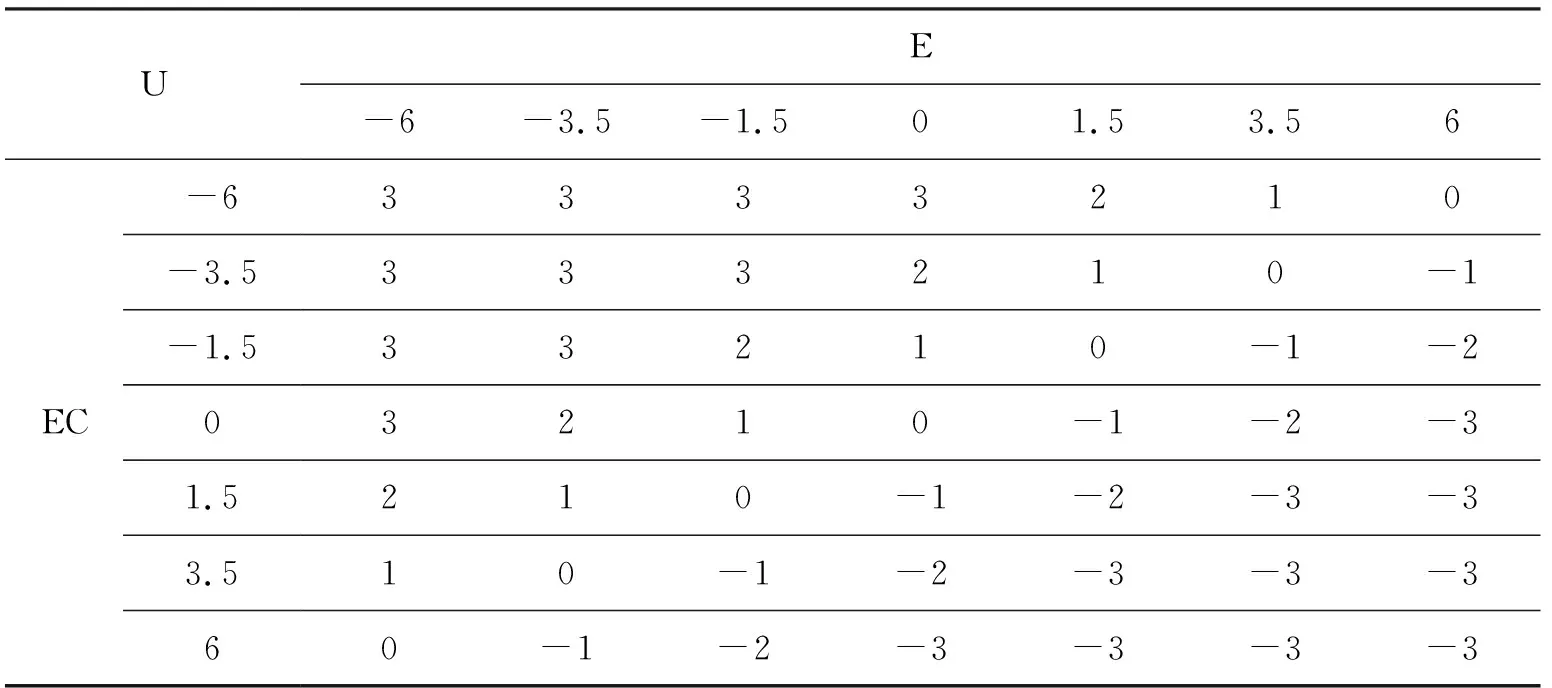
表1 模糊控制规则表
模糊控制器的部分模糊控制逻辑如下:
1.If E =-6 and EC= -6 then U =3;
2.If E =-6 and EC =-3.5 then U =3;
3.If E =-6 and EC =-1.5 then U =3;
4.If E =-6 and EC =0 then U =3;
⋮ ⋮
35.If E =1.5 and EC=6 then U =-1;
⋮ ⋮
49. If E =6 and EC =-6 then U =-3。
模糊控制规则表如表1所示。图2、图3、图4所示分别为三个变量的隶属度函数。模糊控制规则MAP图如图5所示。
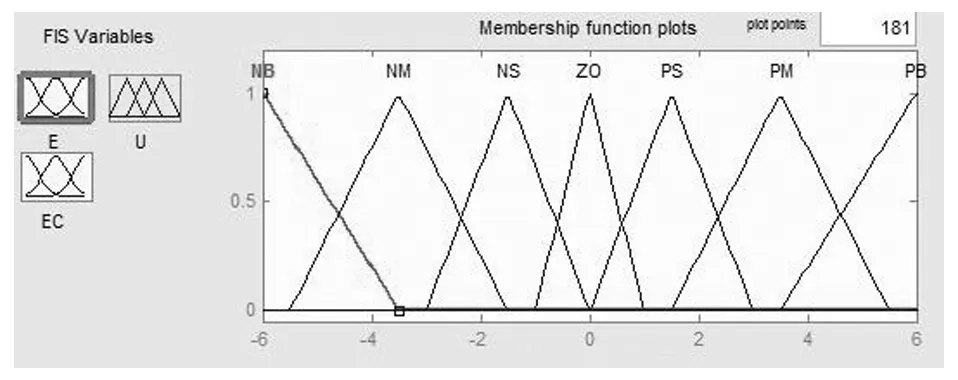
图2 横摆角速度误差隶属函数E
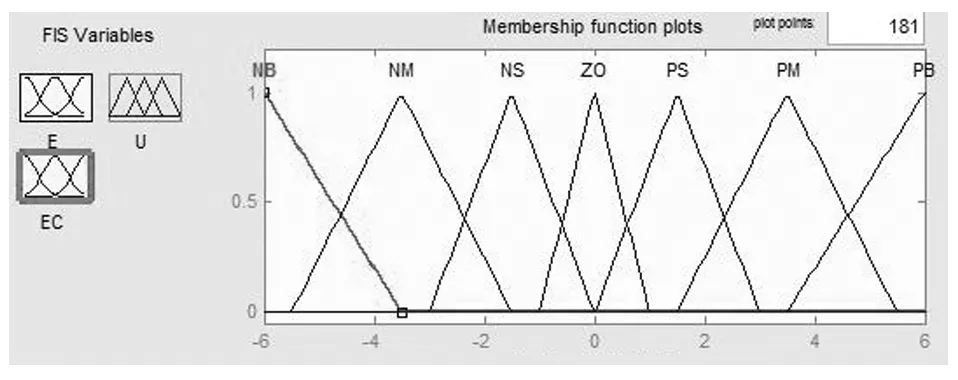
图3 横摆角速度误差变化率隶属函数EC
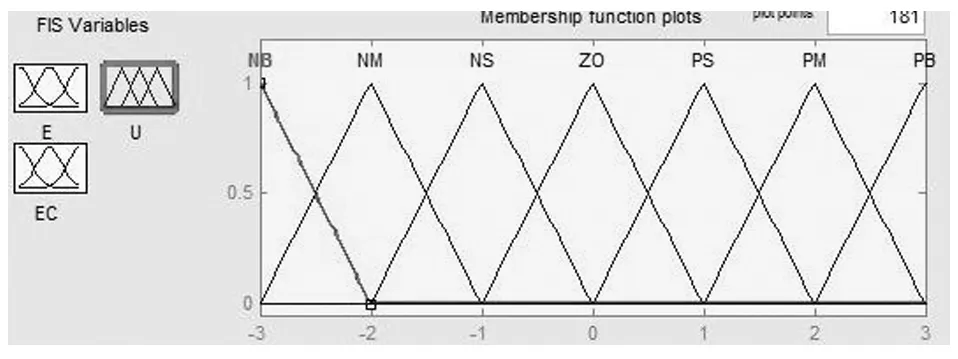
图4 后轮转向齿条输出隶属函数U
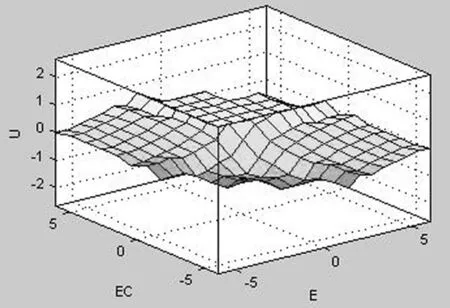
图5 模糊控制规则MAP图
3 联合仿真分析
四轮转向仿真模型如图6所示。将从ADAMS整车模型里得到的实际横摆角速度与从Matab数学模型得到的理论横摆角速度作差,得到横摆角速度差值,再将横摆角速度差值和横摆角速度误差变化率作为模糊控制的输入变量,得到后轮转角补偿量U,再加上比例前馈得到的后轮转角得到最终的后轮转角,再将其转化为后轮齿条位移量,作为ADAMS整车模型的输入量。
对模型进行联合仿真,在ADAMS中设置双移线仿真工况,首先进行四轮转向仿真,在ADAMS里面可得到仿真结果曲线,随后在Matlab中将后轮转角输入开关设置为零输入,再进行仿真,可以在ADAMS里面得到四轮转向和前轮转向的对比结果曲线。
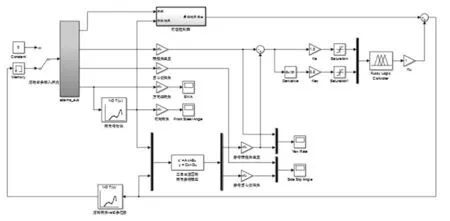
图6 四轮转向仿真模型
(1)将车速设置为30km/h,横摆角速度和质心侧偏角的曲线图,如图7、图8所示。
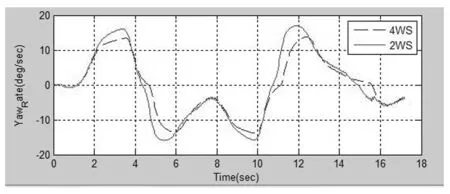
图7 横摆角速度
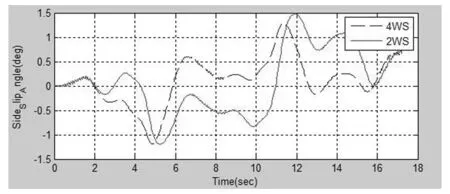
图8 质心侧偏角
(2)将车速设置为100km/h后,得到了横摆角速度和质心侧偏角的曲线图,如图10、11所示。
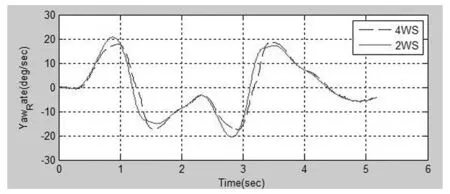
图10 横摆角速度
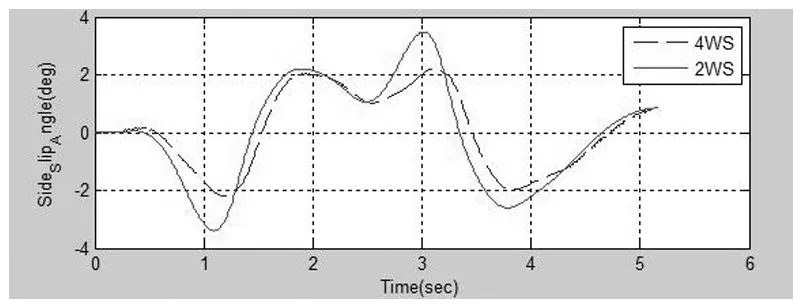
图11 质心侧偏角
由以上仿真结果曲线可看出,汽车在高速和低速情况下,横摆角速度变化都不大,质心侧偏角减小了,车辆对给定路径的跟随性变好了。因此,采用比例前馈和模糊反馈的四轮转向的稳定性要比前轮转向的要好,本文所设计的综合控制器能很好地提高汽车高速转向时的操纵稳定性。
4 结语
从以上的分析,我们可以看出,四轮转向汽车能很好地提高汽车的行驶安全性,同时改善汽车在低速工况下的过多转向和在高速工况下的不足转向,既保证了行车的安全性,也解决了汽车操作的稳定性问题。虽然运用了比例前馈和模糊反馈控制的策略,能够在一定程度上提高汽车的操纵稳定性,但是仍然存在一些不足,需要研究更优的控制策略去解决四轮转向汽车的问题。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
民用飞机设计与研究(2020年4期)2021-01-21
水运工程(2020年2期)2020-02-26
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物流技术与应用(2019年6期)2019-07-16
物理教学探讨(2018年1期)2018-02-13
重型机械(2016年1期)2016-03-01
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11