基于无人机航测立体像对采集大比例尺地形图的数学精度影响因素分析
2018-07-13 06:56:58胡震天周晓琴
城市勘测 2018年3期
胡震天,周晓琴
(南宁市勘察测绘地理信息院,广西 南宁 530023)
1 引 言
由于地理数据变更频繁,大量建设项目都需要采集最新的数据,而测绘工作技术性强,有严格的要求和生产规范,因此造成地理数据采集的周期长,成本高。拓展测绘手段,提高测绘工作效率,降低数据成本,成为亟待解决的问题。
目前,随着航空技术的发展,无人机开始被广泛使用,利用无人机获取影像进行地理信息采集,将大幅度降低航拍作业的条件,主要表现为起飞降落灵活,方便快捷。另外,无人机飞行高度低,采用相对廉价的数码相机也可以进行数据生产,因此能大幅度降低作业的成本,但由于无人机的飞行姿态不稳定,采用的相机畸变较大等问题,如何保证测绘产品的质量,需要进行研究和实践。
利用无人机航测生产地形图建议采用三维模型采集和立体像对采集相结合的方式,立体像对采集还是一个必要和有效的采集手段,本文主要研究基于无人机航测立体像对采集生产大比例尺地形图,研究目的是通过分析影响因素,确定因素对地形图成图的数学精度的影响程度,根据研究结果,在生产过程中规范作业,进行质量控制,从而提高生产效率,提升经济效益。
2 影响因素的选择与测试思路
影响航测成图精度的因素主要有:相机选择、相机检校与影像畸变改正、地面分辨率、重叠度、像控分布数量与精度、平差方式、采集方式等。无人机航测中相机选择应主要考虑无人机的载荷和设计,目前主流为微单相机,必须使用定焦镜头。由于使用的相机一般为非量测相机,建议航拍前应进行相机检校,空三前进行原始影像的畸变改正[1]。重叠度太大,相邻像对的基高比小,高程精度低,像对数量多采集效率低;重叠度太小,相邻模型间会存在漏洞。作者经过多个项目的生产实践已确定航向重叠度和旁向重叠度的经验值。因此,本文主要测试地面分辨率、像控密度、空三方式对成图精度的影响。
测试地面分辨率对成图精度影响的思路:使用不同分辨率的影像,添加相同的像控,用同样的空三软件来试验地面分辨率的影响大小。
测试像控密度对成图精度影响的思路:在试验中,使用同一架次的影像,用同样的空三软件,通过添加不同密度的像控来测试像控密度这一因素的影响程度。
测试空三方式对成图精度影响的思路:使用同一架次的影像,添加相同的像控,用不同的空三软件分别做出空三来试验此因素的影响方式和影响程度。
3 测试技术方案
3.1 测试区域选择
此次测试选取了南宁市西乡塘区约2 km2矩形区域作为试验区。西南角坐标为北纬22.77°,东经108.15°,东北角坐标为北纬22.79°,东经108.13°,区域为丘陵地形,有建筑区、山丘、水域、农田等地类。
3.2 硬软件选择
此次进行航飞的飞机为北京精航科技有限公司生产的型号为YS-21(T-EZ-F)的电动固定翼无人机;相机型号为SONY ILCE5100,镜头焦距为 16 mm。
像控和检查点测量使用仪器为海星达iRTK2经典版,利用南宁市勘察测绘地理信息院GPS连续运行参考站NNCORS系统进行测量,并测设了部分地面控制标志。
空三采用INPHO软件,INPHO软件有两个不同的模块,一是用于无人机数据处理的UAMaster(以下简称小模块),二是用于处理传统航摄数据的空三模块ApplicationMaster(以下简称大模块),立体测图采用适普VirtuoZo数字摄影测量系统。
相机检校和畸变改正采用自行研制的程序进行。
3.3 影响因素的设定
(1)地面分辨率的设定
因主要针对大比例尺地形图测量,根据精度和效率的要求,选择了优于 0.2 m的4个不同的地面分辨率来进行测试,分别为 0.05 m、 0.08 m、 0.12 m、 0.16 m。测试区域地面平均高程约为 80 m,航飞根据影像地面分辨率的不同,共分4个架次,航飞设计参数如表1所示:
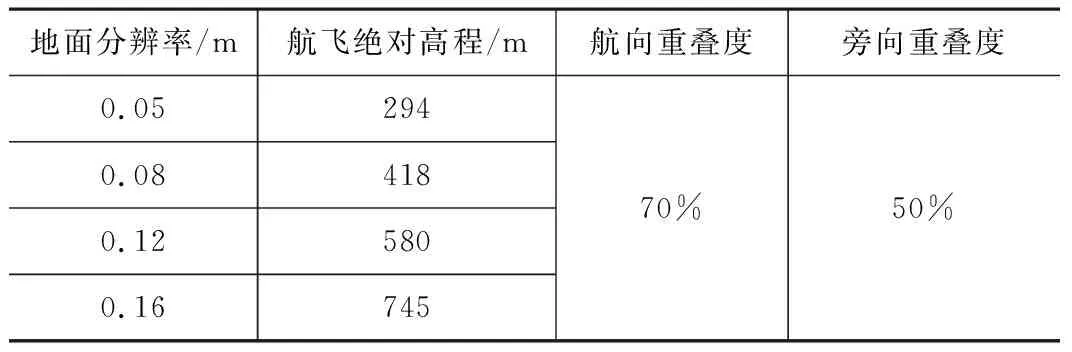
航飞设计参数 表1
(2)像控点密度的设定
像控点密度分5级,逐级加密,均匀分布,每级均保证区域角点有像控。像控点全部为平高点,共测量121处,246个点位,其中35处为人工布设的地面控制点,像控密度分5级,分别用不同颜色表示,分布如图1所示。检核点主要是高程检核点,选择在硬化路面且周围高程变化不大的地方,共测量检核点269个。
第1级为黄色,共6个点;
第2级在第1级的基础上添加4个绿色的像控点,共10个;
第3级在第2级的基础上添加4个浅蓝色的像控点,共14个;
第4级在第3级的基础上添加14个深蓝色的像控点,共28个;
第5级在第4级的基础上添加18个红色的像控点,共46个。
(3)空三软件的确定
目前可用来处理无人机数据的空三软件较多,测试选用INPHO软件,本文仅对INPHO的两个处理模块进行比较。
为方便比较,不同分辨率、不同像控个数、不同空三模块分别进行空三解算,单独命名,命名规则为项目代码+分辨率+像控级数+空三模块代码,例如CSKC0501-B,CSKC为测试项目代码,05表示地面分辨率为 0.05 m,01表示像控添加的为第一级像控,各级像控加入的点数和分布如图1所示,B表示INPHO中大模块做的空三,S则是小模块做的空三。
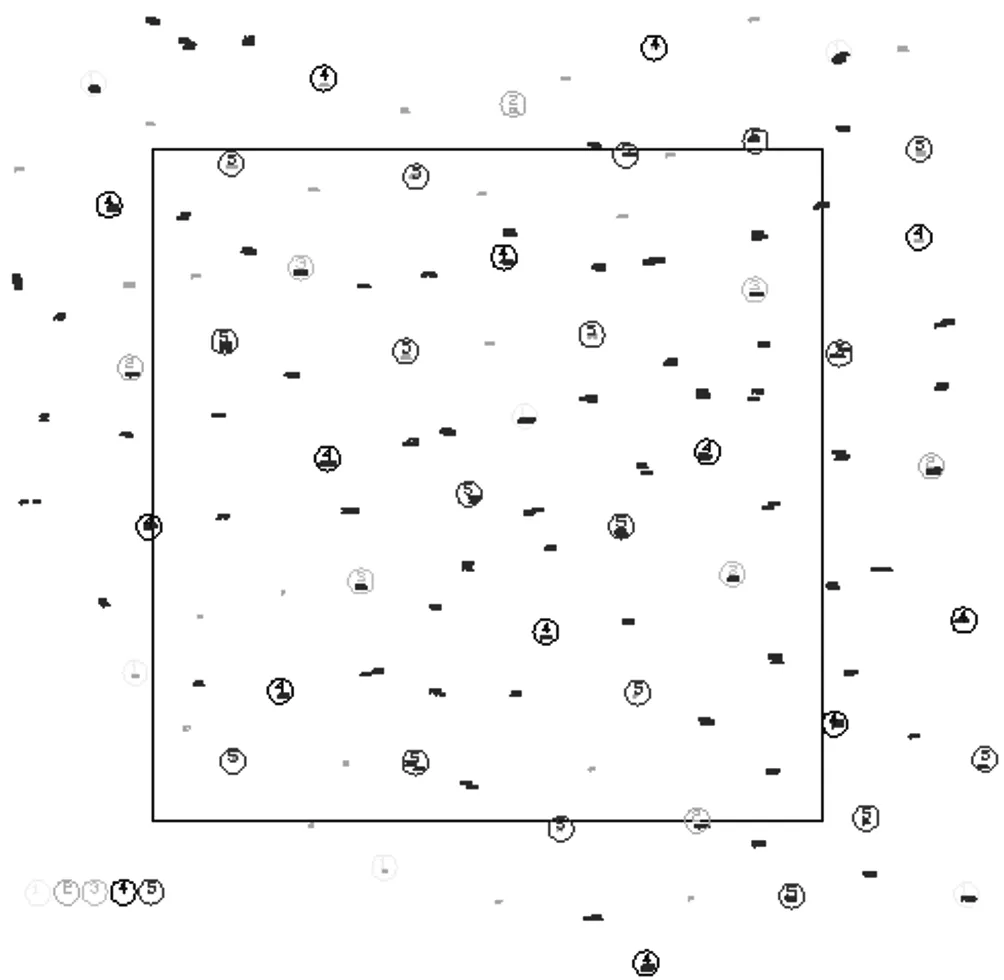
图1 像控分布图
3.4 测试技术流程
根据试验区域的地形特征,布设地面控制点后进行航飞,航飞按不同地面分辨率进行几个架次的航飞,航飞的同时进行像控点的测量。航飞前相机需要进行检校,航飞得到的影像要进行畸变纠正。用得到的不同分辨率的纠正后的影像数据和像控数据进行空三解算,将不同分辨率的影像通过加不同密度的像控,分别用INPHO的大小模块进行平差。在内业进行空三解算的过程中,外业可进行检核数据的测量工作。将空三导入适普对立体像对进行检核点采集。对照外业测量的高程点进行高程检核采集,使用控制点进行平面检核采集。将采集数据与外业实测数据进行对比统计分析。按GB/T 24356-2009规范中4.3.5检测数据的处理中平面和高程中误差计算公式计算中误差。测试流程如图2所示:
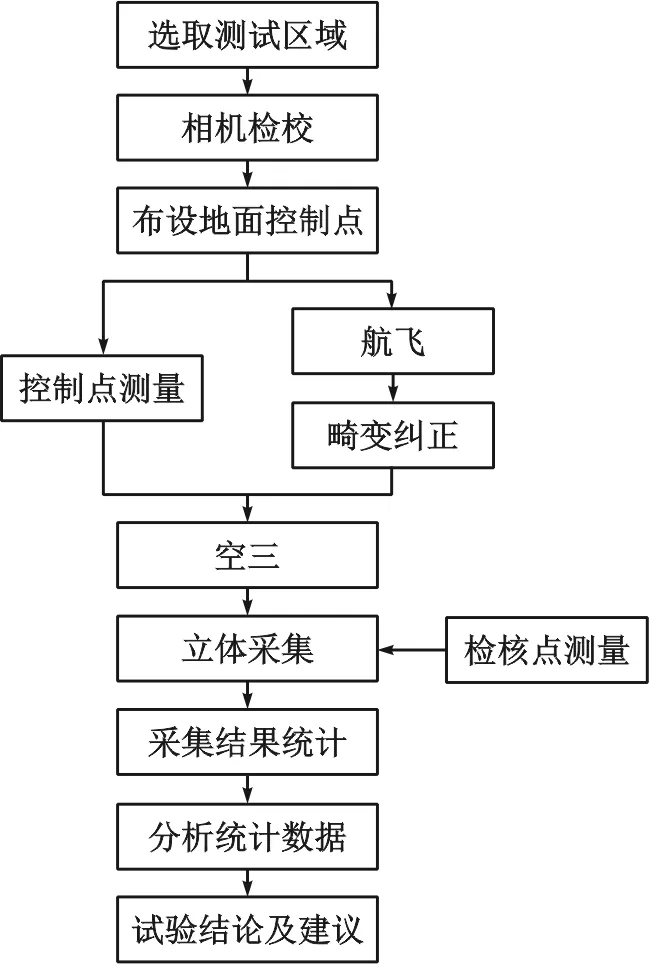
图2 测试流程图
4 测试结果分析
4.1 地面分辨率的不同对精度的影响
此次试验共分4个不同的地面分辨率对同一区域进行航飞,分别为 0.05 m、0.08 m、0.12 m和 0.16 m。统计数据如表2所示:
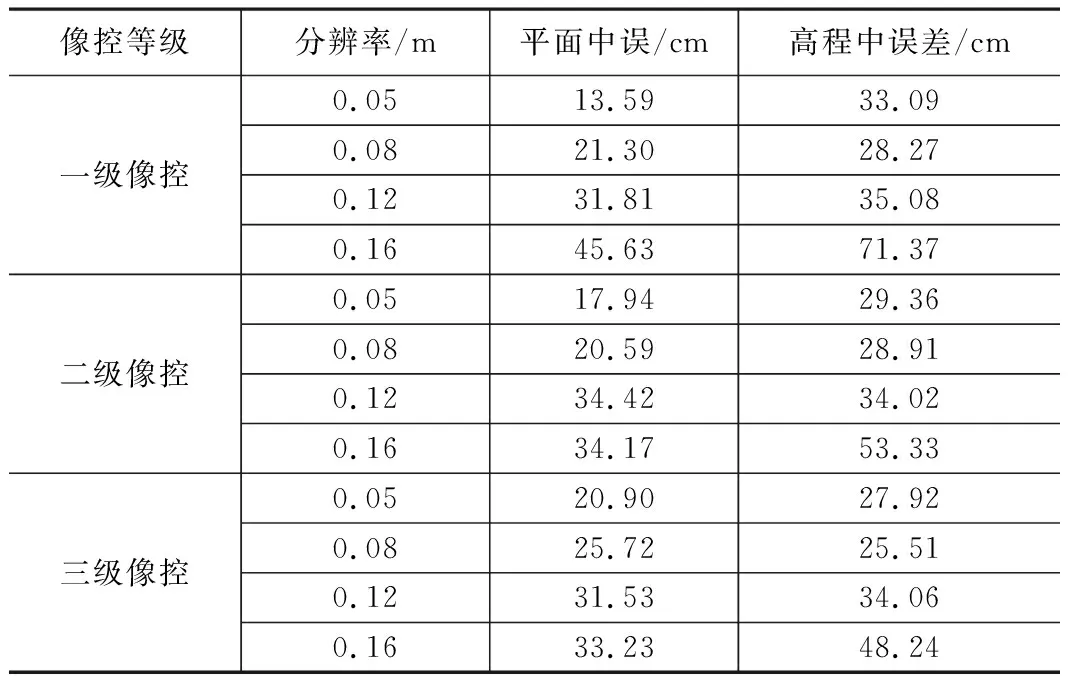
不同分辨率情况下的误差统计 表2
以大模块所做空三为研究对象,统计得出不同分辨率下,检核点可达精度如表3所示:
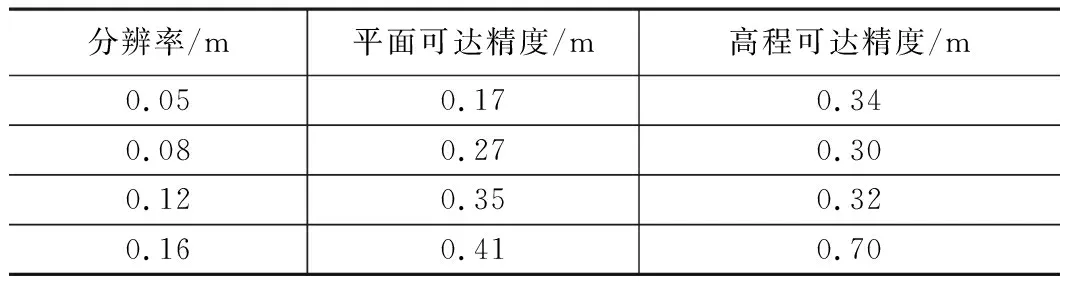
不同分辨率下的检核点可达精度统计 表3
表3中只统计了1级、2级、3级像控下,不同地面分辨率的大小模块平面中误差和高程中误差均值。
通过分析可以得出以下结论:
(1)平面精度与地面分辨率成正比,地面分辨率越高,成图平面精度也越高;
(2)无人机航测立体采集测图的平面精度约为3个像素;
(3)分辨率低于0.08 m时,高程精度与地面分辨率成正比,地面分辨率为 0.05 m与 0.08 m的高程精度相当,也就是说,地面分辨率不宜太高,地面分辨率越高,单个模型覆盖面积越小,模型数量越多,模型接边误差会变大,从效率和精度考虑,建议利用无人机航拍立体模型采集生产大比例尺地形图时,地面分辨率不高于 0.08 m。
4.2 像控密度的影响
采集得出误差如表4所示:
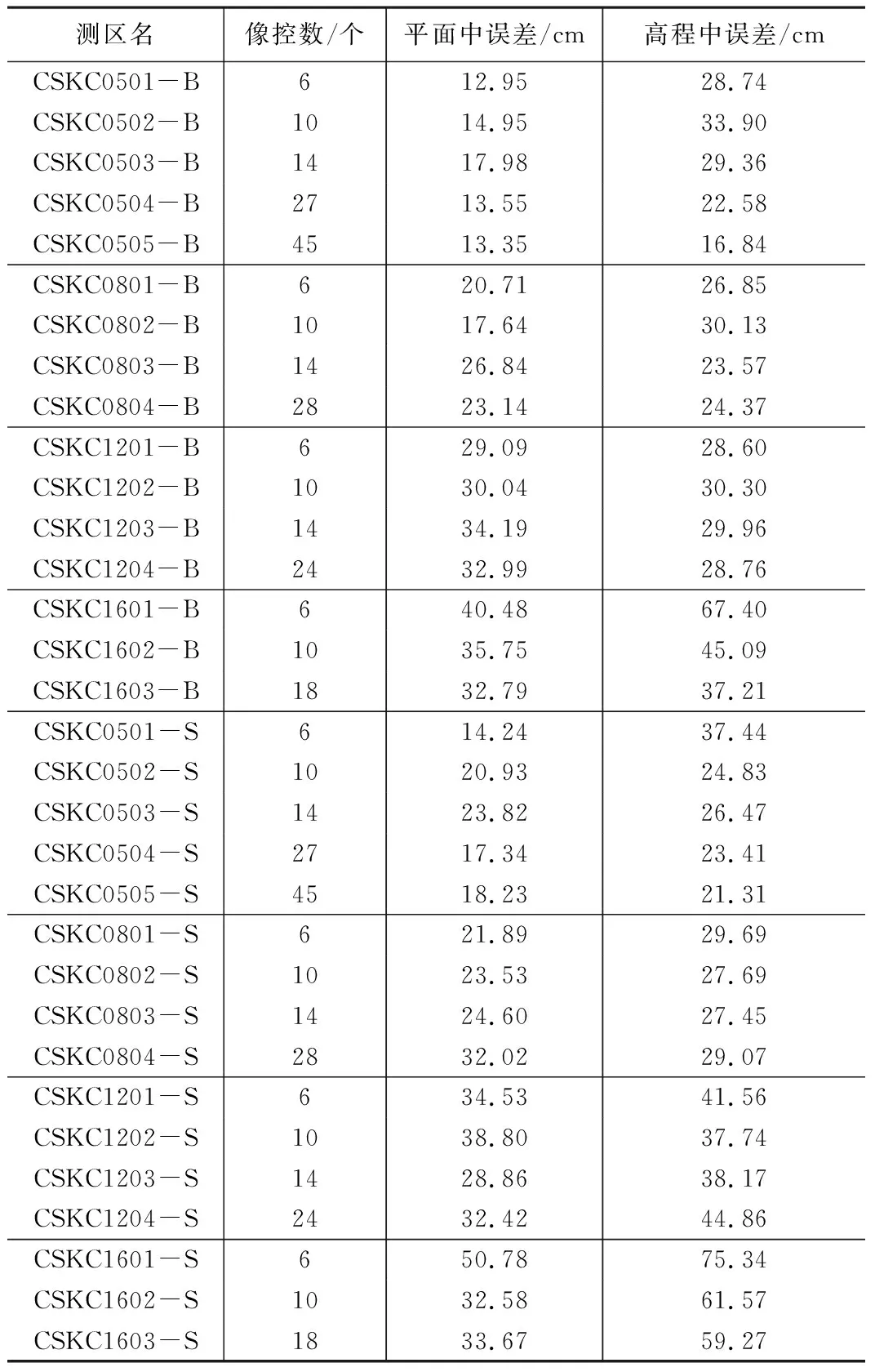
不同像控密度下的误差统计 表4
由统计结果可得:
(1)像控点密度对平面精度影响不明显;
(2)像控点越密,高程精度越好。
4.3 不同空三模块的影响
此次试验是用INPHO软件的大小模块分别对同一数据进行处理,得出不同的空三,分别采集得出的统计数据如下:
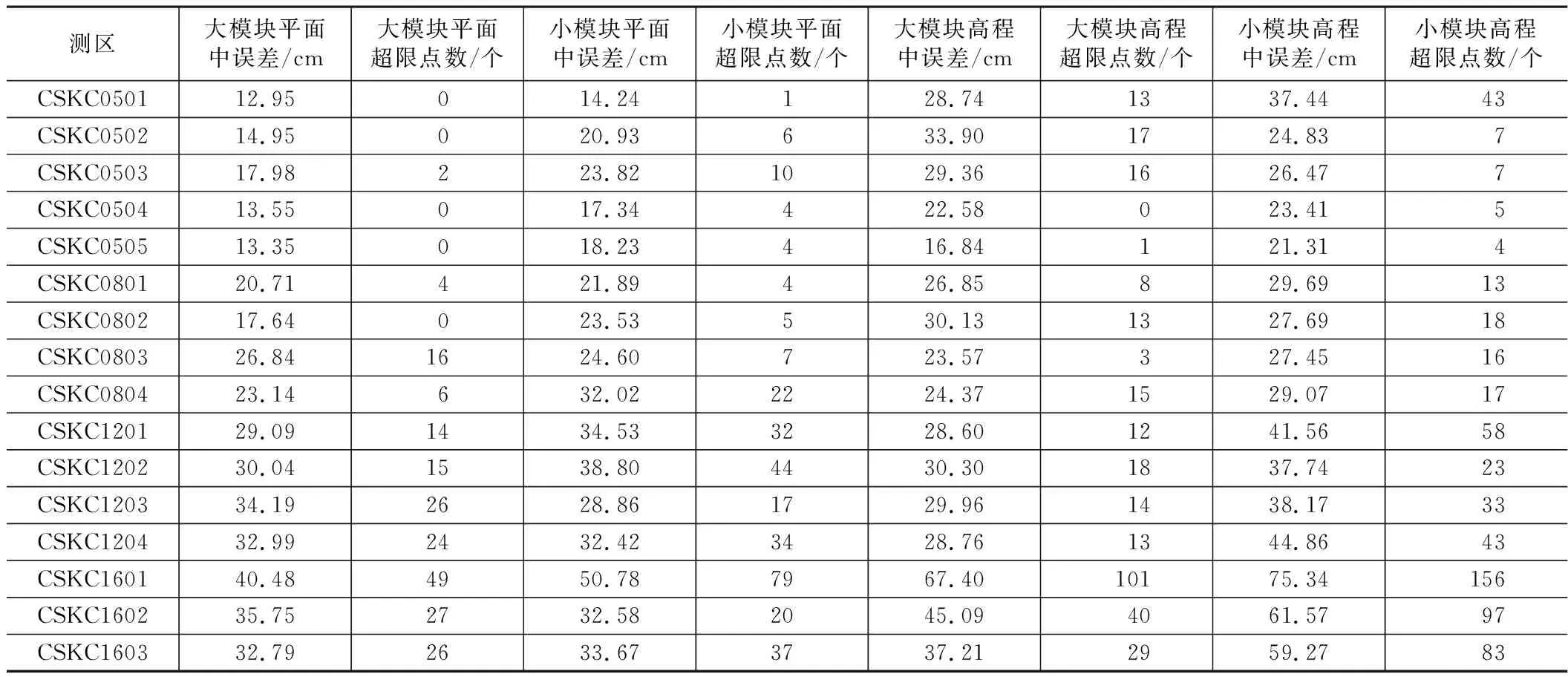
不同空三模块的采集误差统计 表5
由以上表5可知:
(1)大模块比小模块空三后成图精度高,超限点数少。
(2)由于大模块直接处理无人机航拍影像时提取连接点难以通过,建议先用小模块空三,将小模块空三后的外方位元素作为大模块空三的初始值,再用大模块空三处理。
5 结 论
此次试验是针对无人机航拍利用立体像对采集方式生产数字线划图,通过试验统计分析地面分辨率、像控密度、INPHO软件的大小模块所做空三等几个因素对成图精度的影响。此次测试采用实地采集数据,试验数据真实可靠,基本实现测试的目的,达到了测试的效果。
通过试验得出以下结论:
像控点对高程精度影响明显,像控越密,高程精度越好,但对平面精度影响不明显,测区像控分布均匀且角点处均有像控的情况下,平面精度并不随像控密度的增大而增加;运用INPHO软件的大小模块所做出的空三,在原始影像、像控点一样的情况下,大模块所做空三的成图精度要高于小模块所做的空三;区域网布点时,两条航带之间必须有像控点,同条航线上建议每隔6张~8张影像布设一个像控点,像控点的密度约为每平方千米4个~8个点。
从精度和效率两方面综合,用无人机航测立体成图生产大比例尺地形图若用INPHO软件做空三,建议使用大模块来平差,且成图比例尺与各技术参数的关系如表6所示。
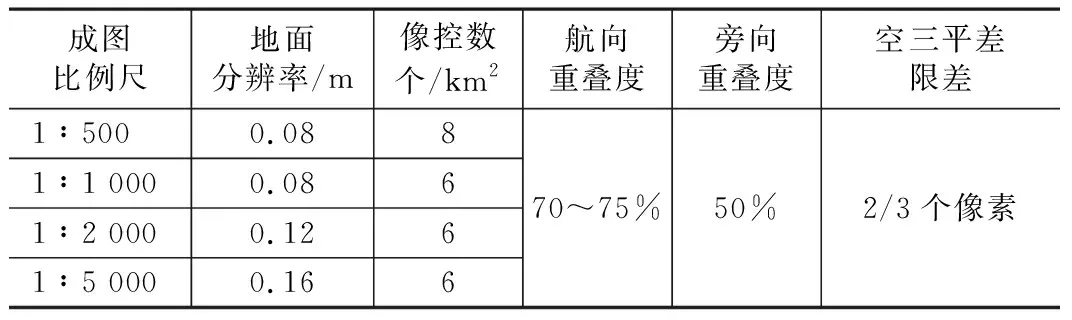
无人机航测立体成图生产大比例尺地形图的技术参数 表6
以上的研究成果对用无人机航空摄影方式生产数字线划图的生产流程,技术设计,质量控制等方面提供了依据,具有一定的生产应用和推广价值。
此次测试虽然基本达到了测试的预期效果,但由于相关因素太多,而在做单一因素试验时,其他因素也会有影响,如天气的影响、个人采集的误差等。试验区域的地形较为平坦,只能代表一种地形,具有一定的局限性,对于丘陵地形、山地地形不具有说明性;试验所用的空三软件为INPHO,采集所用软件为适普IGS,有一定的局限性。若要进一步研究,可从地形、无人机的机型、相机镜头、空三及采集软件等因素做进一步试验。
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
装饰装修天地(2020年7期)2020-06-01 18:43:59
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
企业科技与发展(2018年5期)2018-09-10 00:20:39
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32