电动汽车用开关磁阻电机五电平功率变换器
2018-07-13 02:46宁德胜袁克湘胡维超
汽车工程师 2018年6期
宁德胜 袁克湘 胡维超
(阳光电源股份有限公司)

开关磁阻电机(SRM)结构简单、启动转矩大、调速范围宽而且容错能力强,综合性能突出,非常符合电动汽车对电驱系统的要求[1-2]。但是开关磁阻电机在应用中存在转矩脉动和噪声大等问题,限制了其的广泛应用,针对这个问题,文献[3-5]在控制算法上做了改进,文献[6-7]改进了驱动拓扑。传统非对称半桥式功率变换器仅能提供一种励磁电压和一种退磁电压,不能满足电机在不同负载和转速下的需求,会造成较大的电流或转矩脉动。文章提出了一种新型五电平驱动电路,相对于传统的半桥式驱动电路,其拓扑有更多的电压选项,使得控制更平滑,能够满足电机在不同负载和转速下的需求,减小电机转矩脉动。通过仿真,验证了该功率变换器在抑制转矩脉动上的有效性。
1 五电平功率变换器结构及基本工作原理
1.1 开关磁阻电机基本工作原理
开关磁阻电机采用双凸极结构,只在定子上安装集中绕组,转子上既无永磁体也无绕组。开关磁阻电机运行遵循“磁阻最小原理”,转子沿磁阻最小方向转动,其旋转方向与电流方向无关,仅与励磁顺序有关。开关磁阻电机常用控制方式有电流斩波控制、角度位置控制和电压PWM控制。
不对称半桥式功率变换器是开关磁阻电机最常用的驱动电路,每相有2个主开关器件及反向并联的续流二极管。其具有结构简单、开关器件少的优点,但是传统半桥式驱动电路仅能够提供3种电压回路,控制灵活性差。
不对称半桥式功率变换器的3种工作状态,如图1所示,V1和V2是主开关器件,VD1和VD2是反向并联的续流二极管。其励磁和退磁时加在绕组两端的是电源电压,因此电流变换较快,容易超出滞环区间。随着电动汽车对驱动系统性能要求的提高,传统半桥式拓扑不能达到较为理想的控制效果。具有多种可调电压的驱动拓扑在实际控制中能提供更加丰富的电压选择,增强系统的可控性,是提高开关磁阻电机驱动系统输出性能的理想选择。文章基于对传统拓扑的分析,提出了一种五电平功率变换器。
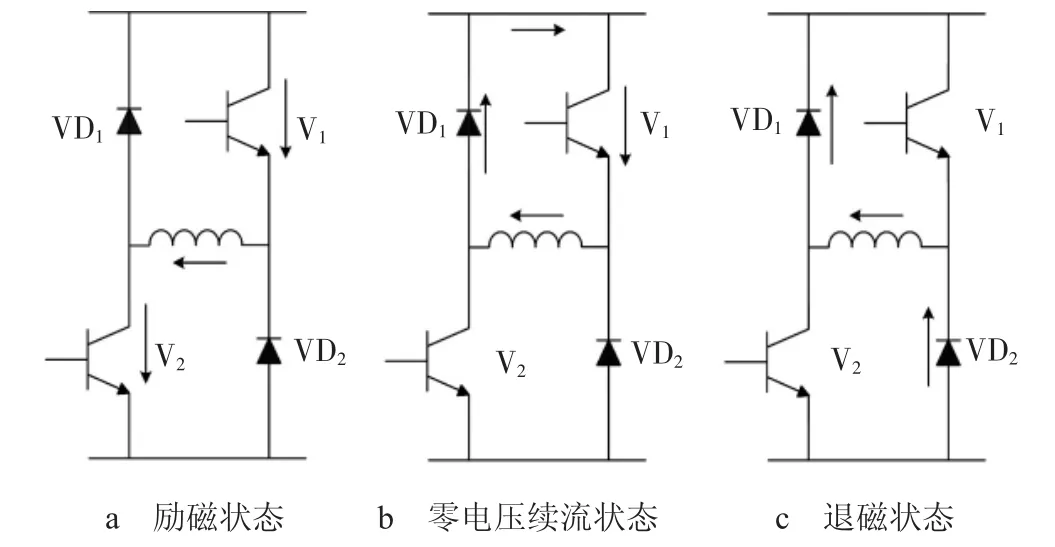
图1 不对称半桥式功率变换器的3种工作状态
1.2 新型五电平功率变换器结构
新型五电平功率变换器,如图2所示。S为三相公共开关管,直流侧电容C1和C2串联,起到分压作用,C1和C2两端的电压为电源电压的1/2,直流侧电容中点通过2个开关管分别连接在绕组两端。该拓扑每相有3个独立的开关管,可通过S与每相独立的开关管配合,控制直流侧2个电容的充、放电,使绕组励磁、退磁或零电压续流,并且可以通过合理控制两电容充、放电来维持中点电位平衡。

图2 五电平功率变换器拓扑
直流侧电压为2Udc,则直流侧两电容的额定电压应为 Udc。S,Sa1,Sb1,Sc1的额定电压值为 2Udc,但 S 是三相公共开关,因此开关频率较高,要求它有较高的开关能力。
1.3 不同工作模式下的开关状态
开关磁阻电机功率变换器可工作于励磁、退磁和零电压续流模式下,文章所提五电平驱动电路分别有励磁和退磁电压2种,而且有多种续流回路。以A相为例对不同电压回路下功率变换器的开关状态及适用情况进行说明。
1.3.1励磁时的开关状态
通常在需要绕组快速励磁的场合,例如转子刚进入导通区间时,需要较大的励磁电压快速建立励磁电流。励磁时的开关状态,如图3所示。此时,图3a中S和Sa1开通,Sa2和Sa3关断,电源电压直接加在相绕组上,相绕组快速建立励磁电流,有利于减小换相时由于后一相产生转矩能力不足带来的转矩脉动,实现快速、平稳换相。

图3 励磁时的开关状态
在滞环控制中,由于开关磁阻电机控制系统采样频率的限制,采样周期较长,会导致实际控制量超出滞环区间,造成较大的电流和转矩脉动,还会影响功率器件的寿命,增加系统的损耗。此时较小的励磁电压是非常必要的,可得到更好的控制效果且有利于系统的安全运行。文章所提拓扑能够通过直流侧电容提供励磁电压Udc,如图3b所示,S和Sa3开通时,C1放电,励磁电压为 Udc1;或如图 3c所示,Sa1和 Sa2开通时,C2放电,励磁电压为Udc2。实际控制中,可以通过控制开关的通、断,使C1和C2轮流充放电,维持直流侧中点电位的平衡。
1.3.2退磁时的开关状态
相绕组在-Udc退磁时也有2种退磁回路,可分别向C1充电或向C2充电。图4示出退磁时的开关状态。如图4a所示,Sa2开通,相绕组通过Sa2和VD11退磁,退磁电流向C1充电;如图4b所示,Sa3闭合,续流电流通过Sa3和VD12向C2充电。-Udc退磁时,有利于新型五电平拓扑,可以通过开关的切换实现直流侧两电容的充、放电,维持中点电位的平衡。如图4 c所示,所有开关管都关断时,绕组电流通过VD11和VD12续流,电源电压反向加在相绕组上使其快速退磁。图4中2种不同退磁电压下的退磁回路可以根据实际需求合理选择,在开关磁阻电机控制中,当电流冲击太大或换相时,需要较大的退磁电压使绕组快速退磁。当电流或转矩超出滞环上限较小时,-Udc退磁可避免退磁太快使电流超出滞环下限值。

图4 退磁时的开关状态
1.3.3零电压续流时的开关状态
零电压续流时的开关状态,如图5所示。文章所提五电平拓扑有3种零电压续流回路。如图5a所示,Sa2和Sa3开通,电流通过Sa2和Sa3续流;图5b中S开通,电流通过S和VD11续流;图5c中Sa1闭合,电流通过Sa1和VD12续流。

图5 零电压续流时的开关状态
2 实际控制系统中新型五电平拓扑的工作状态
滞环控制是开关磁阻电机的常用控制算法,以电流或转矩为控制对象,通过控制功率变换器开关的通断,即加在相绕组两端电压的大小和时间,使被控量围绕参考值波动。因此能否合理控制相绕组两端的电压是影响滞环控制效果的关键,多电平控制对于提高滞环控制系统的跟踪能力具有重要意义。开关磁阻电机导通区间分为单相导通区和2相换向区,单相导通区只需控制1个相绕组输出使其跟踪参考值,2相换向区需要2相的配合使得2相总的输出等于参考值。表1示出新型五电平功率变换器在单相导通区和2相换相区的工作状态。

图1 五电平拓扑单相导通及换相时的工作状态
五电平拓扑单相运行时有5种工作状态,2相换向时有21种工作状态。相对于传统不对称半桥式拓扑多了许多中间状态,因此可以根据实际控制中被控参数与参考值之差,使控制更加细化。这样有利于减小换相时的转矩脉动,使控制更加平滑。
3 仿真分析
为了对比五电平功率变换器与传统半桥式功率变换器的控制效果,通过仿真软件MATLAB/Simulink分别搭建了2种拓扑的仿真模型。并在DITC控制算法下,比较了2种拓扑的控制效果。仿真中电机模型根据查表法建立,仿真电机参数与实际电机参数相同,电机额定功率为35 kW,额定电压和电流分别为336 V和115 A,额定转速为2 000 r/min,电机的采样频率为9.6 kHz。
电机的转矩脉动(KT)为:

式中:KT——转矩脉动值;
Tmax,Tmin,Tavg——转矩最大值、最小值、平均值,N·m。
文章控制算法通过S-function函数建立,仿真中建立了电流-角度-转矩三维表格,实际转矩值根据电流值和角度值查表得到,S-function函数模块根据电机角度和实际转矩值与参考转矩值之差控制开关功率变换器开关管的通断。
图6和图7分别示出参考转矩为40 N、转速为500 r/min时传统非对称半桥式拓扑和五电平拓扑的转矩、电流波形。对比图6和图7可知,采用五电平拓扑的电流脉动要小于传统非对称半桥式拓扑,且电流变化更平滑。图8和图9分别示出参考转矩为80 N、转速为500 r/min时的转矩和电流波形,从仿真波形可知,五电平功率变换器具有更小的转矩脉动。因此,可以证明五电平功率变换器具有更好的转矩脉动抑制效果。

图6 非对称半桥式拓扑仿真波形(参考转矩为40 N)
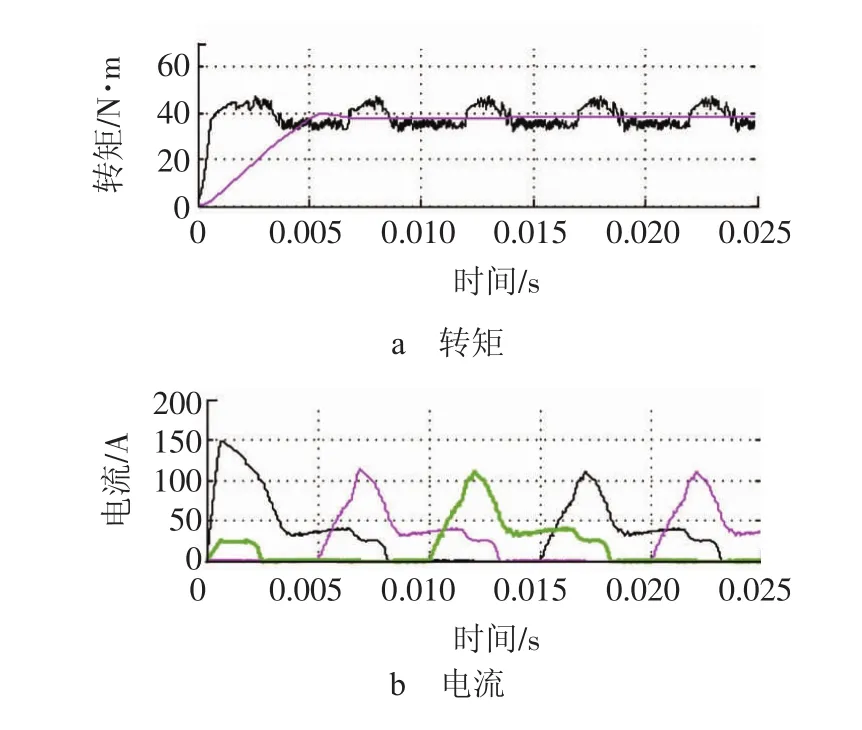
图7 五电平拓扑仿真波形(参考转矩为40 N)

图8 非对称半桥式拓扑仿真波形(参考转矩为80 N)
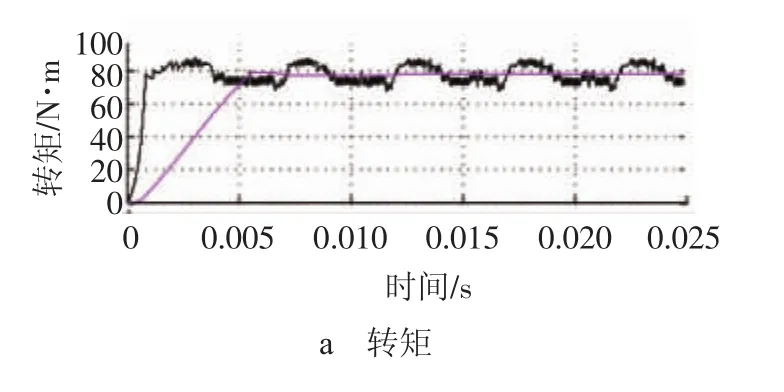

图9 五电平拓扑仿真波形(参考转矩为80 N)
4 结论
五电平功率变换器相对于传统功率变换器有更多的工作模式,通过控制开关的通断可以实现对直流侧电容的独立控制,为相绕组提供多种励磁和退磁电压,使得电流、转矩变化更平滑。仿真结果表明,在相同控制方法下,五电平功率变换器相对于传统非对称半桥式功率变换器转矩脉动和电流脉动更小。因此五电平变换器对提高开关磁阻电机控制的灵活性及减小开关磁阻电机的转矩脉动具有重要意义。
猜你喜欢
电气技术(2022年6期)2022-06-27
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
科学家(2021年24期)2021-04-25
电机与控制学报(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
电子设计应用(2004年9期)2004-09-17