
绝缘子涂层缺陷检测研究
2018-07-10 03:39田立国
天津职业技术师范大学学报 2018年2期
刘 雨,田立国
(天津职业技术师范大学天津市信息传感与智能控制重点实验室,天津 300222)
绝缘子是搭在高压电线连接塔上的一种盘状的绝缘体,作用是增加爬电距离[1],它使带电部件绝缘,并起到机械支撑与定位作用[2]。由于绝缘子长期暴露在户外,大气中的尘埃易沉淀到其表面形成污秽层,产生污闪现象。为防止污闪现象的产生,一般在绝缘子的表面镀一层保护涂层[3]。但是,绝缘子长期暴露在户外,需要定期对绝缘子进行缺陷检测,原始的方法是靠人工对绝缘子进行缺陷检测[4],工作人员通过望远镜从地面对高空进行观察,在断电情况下,爬上高处对绝缘子进行检测,其检测效率较低。将无人机与图像处理技术应用到绝缘子的检测中,不仅可以减少人工成本,还能提高检测精度。当绝缘子出现缺陷时,缺陷部分的图像特性会发生变化,利用边缘检测,检测图像特性发生变化的部位,从而确定缺陷位置。常用的边缘检测算法有微分算子、Canny算子和LOG算子等[5]。Canny算子是一种比较优秀的边缘检测方法,具有低误码率、高定位精度和抑制虚假边缘等特点,但在图像处理的实际操作过程中,会伴有脉冲干扰和椒盐噪音,在这种情况下只用1种算法来进行边缘检测会造成图像边缘提取后,出现边缘点提取错误、图像轮廓提取模糊、边缘效果不强等问题,需在边缘检测前对图像进行去噪处理[6]。因此,需通过中值滤波对图像进行处理。中值滤波作为一种常用的非线性滤波,可有效降低脉冲干扰和椒盐噪音,可使图像更加清晰。它不仅可以处理灰度图像,还可以处理二值图像。本文采用中值滤波对采集图像进行平滑处理,利用Canny算子检测图像边缘,从而实现对绝缘子涂层缺陷的检测。
1 无人机的定位和数据的采集
对塔杆上的绝缘子进行图像采集,无人机从地面飞往距塔杆20 m处,无人机定位方法如图1所示。
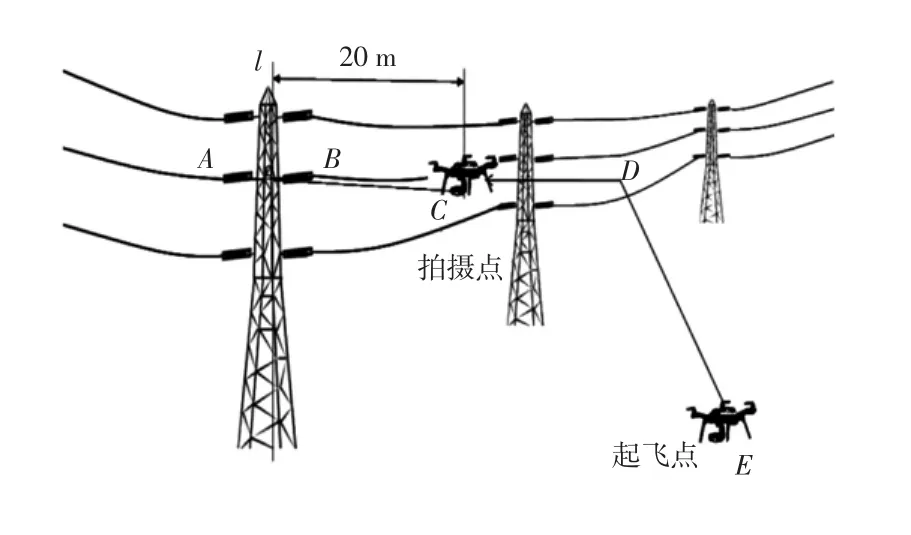
图1 无人机定位方法
将无人机从地面E点导航至拍摄点C,C点距离单侧绝缘子20 m,B点为绝缘子的末端,无人机以B点为初步中心点,通过控制台控制机头和高清变焦摄像头对准塔杆方向进行绝缘子的图像采集,同时提取绝缘子中心点的坐标和图片的中心坐标,通过CCD的尺寸和拍照时的焦距,计算出绝缘子与相对焦点中心线的夹角,然后调整云台进行对焦拍摄,系统流程如图2所示。

图2 系统流程
在GPS系统中,首先获取进行绝缘子图像采集的电线塔杆坐标(当地电力局可查询到所需坐标),而无人机进行图像采集的坐标,即距离塔杆中心侧20 m处的GPS坐标最为重要,偏移点坐标如图3所示。可通过已获得的塔杆坐标和塔杆方位进行运算[7]。将塔杆单侧绝缘子的中心点 O处坐标设为(OL,Ol,h),通过式(1)~(4)可得出水平偏移坐标。

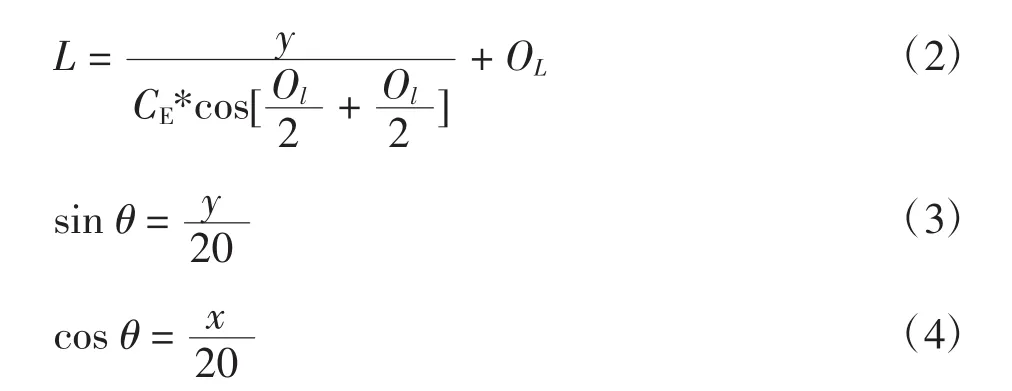
式中:坐标中选取的弧度CE=6 378 137;偏移后坐标由l和L表示;x为经度方向偏移距离;y为纬度方向偏移距离;θ为导线走向与纬度方向的夹角。
在无人机控制系统输入已计算出的GPS坐标,无人机将会执行设定的任务,飞往指定地点。

图3 偏移点坐标
2 图像处理算法
2.1 中值滤波
图像在采集的过程中,无法做到完全消除高频噪声,因此为了更好地抑制噪声,一般采用低通滤波,但仍有很多高频信息存在于图像轮廓边缘,使用低通滤波过滤噪声会造成图像边缘变得模糊难以识别,所以可采用中值滤波方法消除图像边缘模糊问题,在噪声过滤的过程中保持图像边缘的清晰度。
中值滤波作为一种常见的非线性滤波,它是一种类似于卷积的邻域运算,但并非是加权求和计算,它是排列邻域中的灰度像素等级,选择1个中间像素值作为输出值,可有效降低傅里叶空间中的高频分量。但对低频分量会产生影响,图像中的高频分量区域边缘的灰度值有一部分变化较大较快,中值滤波可以将这一部分消除,使图像变得更加平滑。
中值滤波的工作原理:首先,找寻1个像素,以该像素作为中心领域,其形状为方形;然后,将该方形领域每个像素进行灰度值排序,取其中间值赋值给中心点像素,领域在此称为窗口;最后,这个方形窗口在图像中前后左右移动时,采用中值滤波算法能够很好地对图像进行平滑处理[8]。中值滤波能够很好地消除椒盐噪声,且能消减傅里叶空间的高频分量,同时还能影响低频分量。
选择数字图像中或序列中的1个值,用它邻域的平均值将其代替。其定义为:对一维序列x1≤x2≤x3≤xn,欲把 n 个数据按大小排列 xi1≤xi2≤xi3≤xin,则
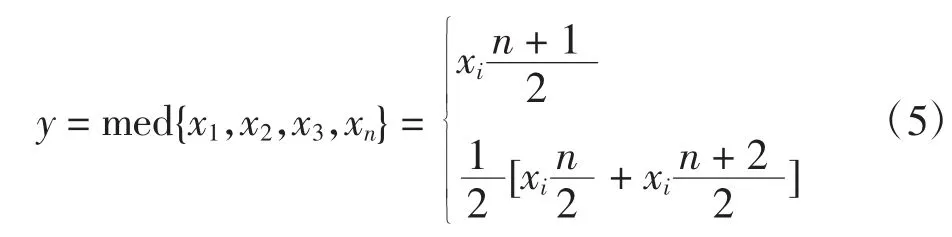
在操作过程中选择L=2n+1的滤波窗口,n为正整数。让此方形窗口在图像中移动。过程如下:
①让模板漫游于图像之中,使其中心重叠于图像某个中心像素;
②提取模板中一一对应的像素的灰度值;
③对灰度值进行排序;
④找出其中的中间值;
⑤将中心位置的像素值替换成中间值。
中值滤波窗口中的中间值为输出值,因此中值滤波对极限像素值(和周围灰度值上下浮动大的像素)没有平均值那么准确,所以能够更好地消除独立的噪声点,且能够使图像变得更加清晰。
在图像中某一像素与其相邻的像素在灰度值上有密切的关联性。由于存在这种灰度相关性,因此在低频区域集中了大部分能量,高频部分集中了大多数的细节部分能量。而产生于图像数字化和传输过程中的脉冲干扰和椒盐噪声,其能量大部分存在于高频区域,所以在图像处理的过程中,既能有效消减噪声和干扰,还要使得图像清晰化并保持细节,显然存在矛盾[9]。因此,在最大程度消减噪声和干扰的同时,还应最大化地保留图像细节。
2.2 Canny算子
Canny原理是把边缘检测转换为检测单位函数极大值。在高斯噪声中,一个典型的边缘代表1个阶跃的强度变化,Canny对检测出来的边缘信息提出3个标准[10]:
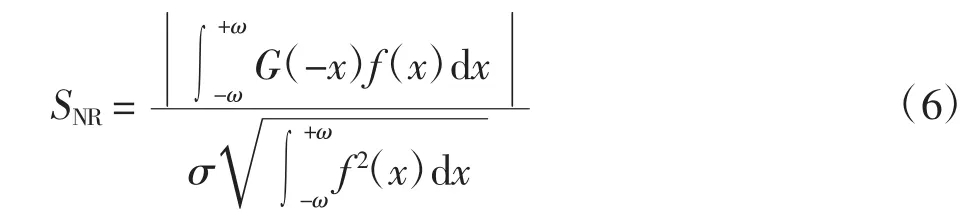
①信噪比标准 图像检测的边缘均真实有效,减少不相关的边缘信息,信噪比数学表达式为:式中:f(x)为边界上[-ω,+ω]的滤波器的脉冲响应;G(-x)为函数;σ为高斯噪声的均方差,信噪比越大提取的边缘质量越高。
②定位精度准则 对于边缘信息的提取要尽可能标准,数学表达式为:

其中L值越大,表明定位精度越高。
③单边缘响应准则 同样的边缘,响应次数要少,检测算子的脉冲响应导数的零交叉点平均距离D(f′)应满足:
Canny边缘检测的过程为:
a.用高斯滤波去除图像中的噪声,采用的高斯函数为:

b.对滤波后图像中的每个像素,梯度复制与方向的计算,使用一阶有限差分来近似图像灰度值,得到2个关于x和y方向的偏导矩阵,用一对卷积阵列分布作用于对应的水平与垂直方向为:

计算出幅值与方向为:
c.非极大值抑制。寻找像素点局部的最大值,将非极大值点所对应的灰度值设置为背景像素点,像素邻域区满足梯度值的局部最优值判断为该像素的边缘,对其余非极大值的相关信息进行抑制,利用该准则可剔除大部分非边缘点。
d.用滞后阈值算法求解图像边缘。上一步骤得到的疑似边缘中存在伪边缘,由于单阈值处理边缘选取操作较难,Canny算法采用滞后阈值法减少伪边缘数量。Canny选取了滞后阈值,滞后阈值不仅需要高阈值还需低阈值,在进行边缘确定时依据下面的步骤:a).假设某像素的幅值高于高阈值,将此像素保留作为边缘像素;b).反之,若该像素的幅值低于低阈值,将此像素删除;c).若像素幅值低于高阈值高于低阈值,此像素被保留的条件仅限于连接1个高阈值像素时。
2.3 Sobel算子
Sobel算子可以被看做一个梯度算子,是一种基于一阶微分的边缘检测算子,一般包含2组3×3的矩阵,记为 Mx和 My,即
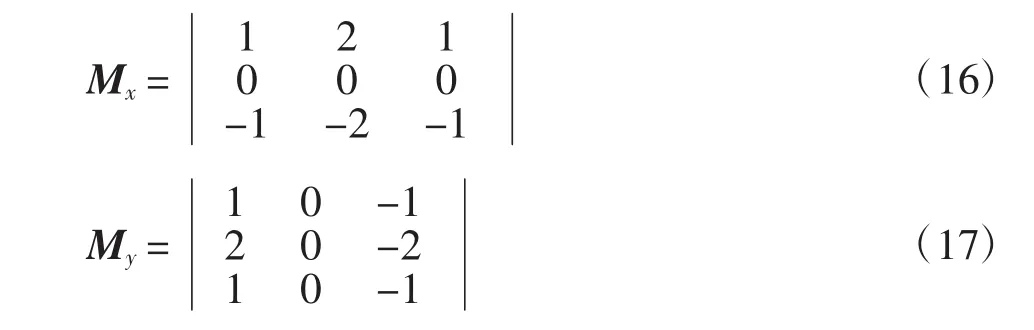
式中:Mx与My分别表示水平梯度方向检测垂直边缘以及垂直梯度方向检测水平边缘。
3 实验结果及分析
3.1 缺陷检测步骤
针对无人机采集到的图像可能因受到环境影响造成图像出现噪声等问题,采用先通过中值滤波进行预处理,再通过Canny算子与Sobel算子分别对绝缘子涂层缺陷图像进行检测的方法。最后进行对比,实现绝缘子的缺陷识别。缺陷检测流程如图4所示。
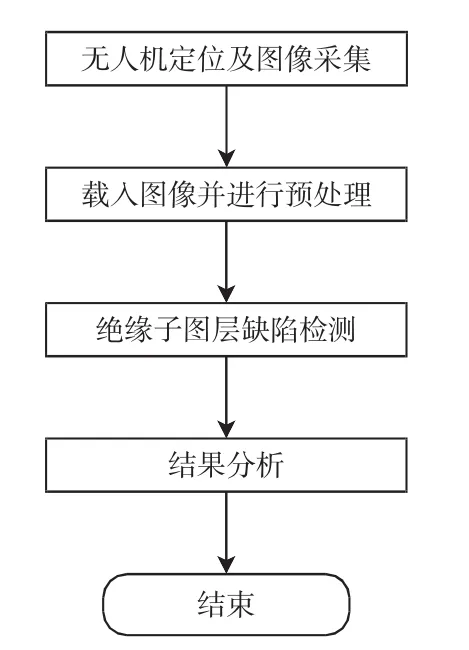
图4 缺陷检测流程
具体步骤如下:
(1)图像采集 无人机通过GPS进行定位飞达指定位置进行图像采集。
(2)噪声滤除 采用中值滤波算法对图像进行预处理,滤除掉图像中的噪声,为后续缺陷检测系统更好地提取到绝缘子边缘做准备。
(3)缺陷检测 将处理过的图像通过Canny算法检测与Sobel算法检测。
(4)结果分析 将缺陷检测结果进行对比分析。
3.2 实验结果分析
采用Matlab 7.1(R2010b)对带有缺陷的绝缘子图像进行中值滤波消除椒盐噪声处理,去噪图像如图5所示。
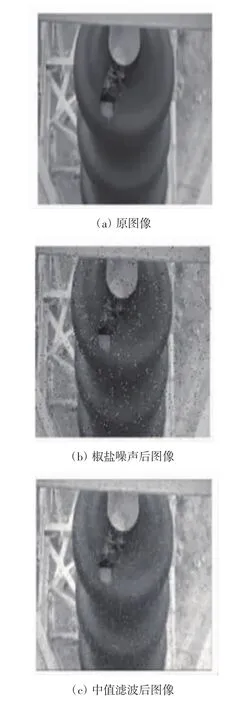
图5 去噪图像
从图5可知,中值滤波在消除孤立噪声点的同时,还很好地保护了图像边界信息,使得在接下来的绝缘子涂层缺陷检测时不容易出现误检、漏检等现象。
对经过中值滤波后的图像采用Canny算子与Sobel算子进行检测,缺陷检测图像如图6所示。
对比图 6中的图像(c)和(d),得出 Canny算子在绝缘子涂层缺陷的检测中能够更好地保护边缘信息,使缺陷部位的信息图像输出更加清晰。
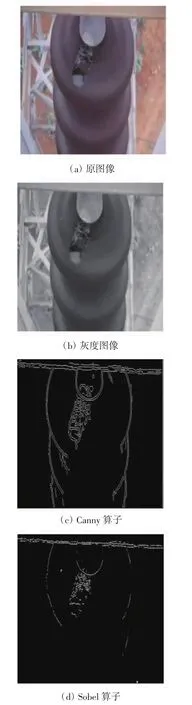
图6 缺陷检测图像
4 结语
将无人机与图像处理应用于绝缘子涂层缺陷检测,相比于原始的人工高空检测,不仅提高了检测的精度,还提高了工作人员的安全系数。在图像处理部分,中值滤波法能有效消减噪声且能很好地保留图像的细节。在图像缺陷检测算法上,选择了Canny算法与Sobel算法并进行了对比,发现Canny算法对边缘的提取达到了实验前的图像效果,没有选择到高强度噪声作为边缘,也没有漏选低强度边缘,能够识别出缺陷部位。本文提出的基于Matlab的图像处理与无人机相结合的绝缘子涂层缺陷检测系统相较于传统的检测工艺具有明显优势。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
北京航空航天大学学报(2022年6期)2022-07-02
高校应用数学学报A辑(2022年2期)2022-06-21
计算技术与自动化(2022年1期)2022-04-15
数学物理学报(2021年2期)2021-06-09
宁夏电力(2021年1期)2021-03-19
天津医科大学学报(2021年1期)2021-01-26
校园英语·上旬(2020年1期)2020-05-09
电子制作(2018年17期)2018-09-28
自动化学报(2017年5期)2017-05-14
