基于数字补偿技术改善高压功率源失真度 指标的研究
2018-07-06 11:26,,,,
四川电力技术 2018年3期
, ,, ,
(1.国网四川综合能源服务有限公司,四川 成都 610021; 2.国家开发银行西藏自治区分行,西藏 拉萨 850000; 3.国网四川省电力公司电力科学研究院,四川 成都 610041; 4.当雄县羊易地热电站有限公司,西藏 当雄 851500 ; 5.中国华电集团有限公司西藏分公司,西藏 拉萨 850000)
0 引 言
近年随着高压电能表的应用范围逐步扩大,检定的工作量不断增加,迫切需要采用一源多表的计量检定方式并以最优性价比方案应对检定需求量的增加。
目前对于高压电能表的检定均采用虚功率法,计量装置功率提供源有两种方式:一是采用市电通过一定滤波后自耦升压的方式为高压电能表提供虚功率;二是采用程控功率源方式。无论采用哪种方式,均不能实现电压大环反馈,从而导致高压电能表获得的电压信号失真度普遍偏大。通过不同高压电能表生产企业实际生产过程的检测数据所知:当计量装置挂1台高压电能表检定时功率源输出信号波形失真度约为0.5%;挂2台高压电能表时,功率源输出信号波形失真度约为0.96%;挂3台高压电能表时,功率源输出信号波形失真度约为1.44%;挂4台高压电能表时,功率源输出信号波形失真度约为1.92%。失真度指标随着负载的增加而呈线性的变差,虽然负载还远未达到计量装置输出功率满载值,但在实际测试中使用4块电能表作为电压的负载接入,电压输出信号失真度指标已经接近国家标准规定的失真度最大值。由于现有高压电能表误差判定法是采用标准表来检定高压电能表,电压信号失真度指标好坏会影响标准表和高压电能表电能累量的大小,从而导致引入测量误差。
在一源多表工作方式下如何降低信号失真度的量值一直困扰着计量装置生产厂家。在传统的高压电能表计量装置的信号处理系统,由于存在着高压升压器、高压PT等非阻性器件,导致了高压电能表计量装置信号处理系统的截止频率只有400~700 Hz,离50 Hz工频信号只有10倍频程距离,所以采用传统模拟PID电路无法把信号处理系统的开环增益提高,无法减少系统的稳态误差,从而也就无法改善电压信号失真度指标。
针对高压电能表计量装置传统的信号处理系统存在的不足,提出了一种基于数字补偿技术改善高压电能计量装置功率源输出信号波形失真度指标的方案。该方案的提出得益于近年电子信息技术的发展与大规模集成电路的广泛应用,特别是高速高精度的采样AD以及超强运算能力的DSP芯片的出现,使该方案的实施成为了可能。
1 基本原理
现有计量装置原理框图如图1所示,其输出信号特性如图2所示。
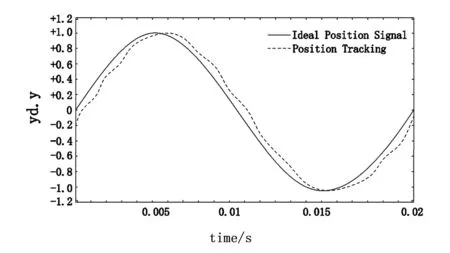
图2 计量检定装置功率输出信号
图2的实际测试输出信号波形图清晰显示现有计量装置输出与输入信号比较存在着较大的差异和失真。
所提的基于数字补偿技术改善高压电能计量装置功率源输出信号波形失真度指标方案,是在充分考虑到高压电能表计量装置信号处理系统的特点,无需考虑升压器、高压PT、高压电能表等负载特性曲线所带来的不确定影响度情况下,采用高速高精度的逐点采样技术对输出信号进行采集,运用超强运算能力的DSP芯片进行PID算法补偿运算,然后逐点对信号进行补偿并重新生成功率输出信号波形,以此数字方式补偿回路非线性失真,从而改善高压电能计量装置功率源输出信号波形失真度指标,原理框图如图3所示。

图3 数字补偿技术方案原理
该方案实施的前提是采用表源一体的程控功率源(由一体化的数字合成高精度信号源、高稳定度的程控功率源组成)。因为系统DA、AD只有工作在同一时钟条件并使用同一信号波形函数两个前提同时满足的情况下,才能和采样波形数据逐点比对以获得误差函数表;否则,没有统一的同步参考时间的数字补偿是无从谈起的。另外,没有足够精度的信号源(信号源需要最少每周波3600点以上),或无法控制信号源波形函数,得到的数字补偿量也无法实施,所以选用表源一体的程控功率源是方案实施的前提。此外,高精度稳定源的低压部分的闭环控制,仍然保持原来较高的增益反馈环,以保证设定的输出比较函数处于收敛状态,以及输出信号具有较小的失真偏差量值。
该方案实施的核心是实现系统管理运算的硬件需采用高性能AI核心板协调管理各部件工作;高速数字采样AD芯片进行高速采样;高速双核DSP算法运算芯片进行高速运算。合适的硬件部件是数字补偿系统实现的关键。
2 方案实现
方案主要由表源一体的程控功率源、数字补偿电路、数字补偿算法3部分组成。
2.1 表源一体的程控功率源
表源一体的程控功率源由数字合成高精度信号源、程控功率源、升压器、高压电能表、高精度高压PT等5部分组成。数字合成高精度信号源用于指定信号函数波形的产生,例如产生50 Hz、每周波3600点组的正弦函数信号;程控功率源用于电路的模拟PID调节以及信号功率放大;升压器把功率放大信号进行二次电压升举,并保留升压器初级的原反馈环,以压缩减小信号误差;高压电能表为检定的对象,系统的负载;高精度高压PT为负载电压信号的精准采样部件。
传统的数字合成信号源每周期DA幅值点数约在360~400点之间,等于每点修正影响量达到0.25%,因而导致数字补偿信号无法精准补偿信号源函数波形,也就无法满足0.05级计量检定装置的实用要求。提出采用数字合成高精度信号源,是把数字合成信号源DA幅值点数每周期信号提升至4000点乃至40 000点,等于每点修正影响量达到0.025%~0.002 5%,完全满足了0.05级计量检定装置的实用要求,能以逐点方式精准补偿信号源函数波形的失真,如图4所示。
在实验过程中,测试了多个厂家不同的升压器、

图4 数字合成高精度信号源波形比对
高压采样PT组成的系统,开环截止频率均分布在400~700 Hz,在距50 Hz工频信号约10倍频程距离,串联校正模拟电路开环增益Ga(Ga=20log10=20 dB),得出的理论开环增益值距系统开环增益理想值40 dB还差很远的距离。为了确保系统的闭环稳定性,幅频裕度还需要开环增益降低6 dB,所以系统模拟电路开环增益Ga只能取14 dB以下。由于模拟电路系统均为有差负反馈系统,因而系统的稳态误差与开环增益成反比关系,开环增益越高稳态误差也就越小,开环增益小了相应地导致稳态误差增大,从而导致电压信号失真度指标变差。
高精度高压PT需达到0.01等级以上要求,PT是数字补偿量的参考基准,该部件的参数准确度直接影响着系统的指标特性,是数字补偿量精准度得以保证的前提,这是因为数字合成波形电路失真由设定输出与采样值的误差所获得的比较函数来进行校正。
2.2 数字补偿电路
数字补偿电路由高性能AI核心、高速采样AD、高速运算DSP芯片组成。高性能AI核心负责数据的收集及算法深度学习运算,最终实施控制信号的输出,需具备主流的神经网络框架,具有AI运算以及人工智能堆栈,具备神经网络计算硬件加速,还要兼顾方案成本。高压PT反馈信号数字采样选用高速采样AD芯片,采样速率需达到10 MHz以上。数字信号采样后需要进行滤波、去噪,然后才能进行高速实时信号运算处理,因而需要具有高速运算能力的DSP芯片,才能及时地应对多路并发运算的需求。
2.3 数字补偿算法
要实现数字补偿控制首先要对采集到的数字信号量值离散化处理,采用如位置式数字PID控制算法[1]处理。其运算公式如下:

(1)
式中:e(k)为数字PID运算量输入,为第k个时刻的偏差值;u(k)是第k个采样时刻数字PID控制算法输出;Kp为比例系数;Ki为积分系数;Kd为微分系数;δ为升压器、采样电路等综合补偿因子。
显然采用位置式数字补偿算法适合于周期性补偿,因为每次波形信号均为全量值输出,为了保证输出信号波形的完整性,每次每点采样运算后的输出值u(k)以数组方式暂存在内存;当完整采样完4000点后,在下一周期开始才把运算结果以整周期信号波形方式更新输出。位置式逐点数字补偿原理如图5所示。

图5 位置式逐点数字补偿原理
位置式数字补偿算法需要按周期采样点数建立e(k)差值、u(k)输出值的缓存数组。如果需要多点均值化滤波处理,那么对于内存的容量需求是相对较大的。在内存容量不大而且运算速度裕度大的系统可以采用增量式控制算法[2],令式(1)中的k=k-1,得其运算公式如下:
(2)
式(1)减去式(2),得增量式PID运算式为
Δu(k)=δ(u(k)-u(k-1))=δ( Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)])
(3)
从式(3)可以看出,增量型数字补偿算法不需要做累加,仅与最近几次误差采样值有关,大大减少了数字补偿系统对内存的依赖;另一方面增量型数字补偿算法得出的是补偿增量,过补偿量影响小,因而补偿扰动小。
增量式数字补偿算法也有其不足之处,相对位置式数字PID控制算法,其对高性能AI核心、高速采样AD、高速运算DSP芯片等性能要求相对较高,以50 Hz信号频率4000点数字量化输出为例:每点输出保持的时间为5 μs,每点采样及补偿10次,那么采样AD的采样频率要求最低需要达到500 ns以上;对于DSP运算速度要求为500 ns一个采样点,暂按3次采样叠加运算,每次运算指令约为20条,运算速度最低需要达到25 ns。纵观现有电子芯片技术水平,以上指标要求已经可以轻松实现。增量型逐点数字补偿原理如图6所示。
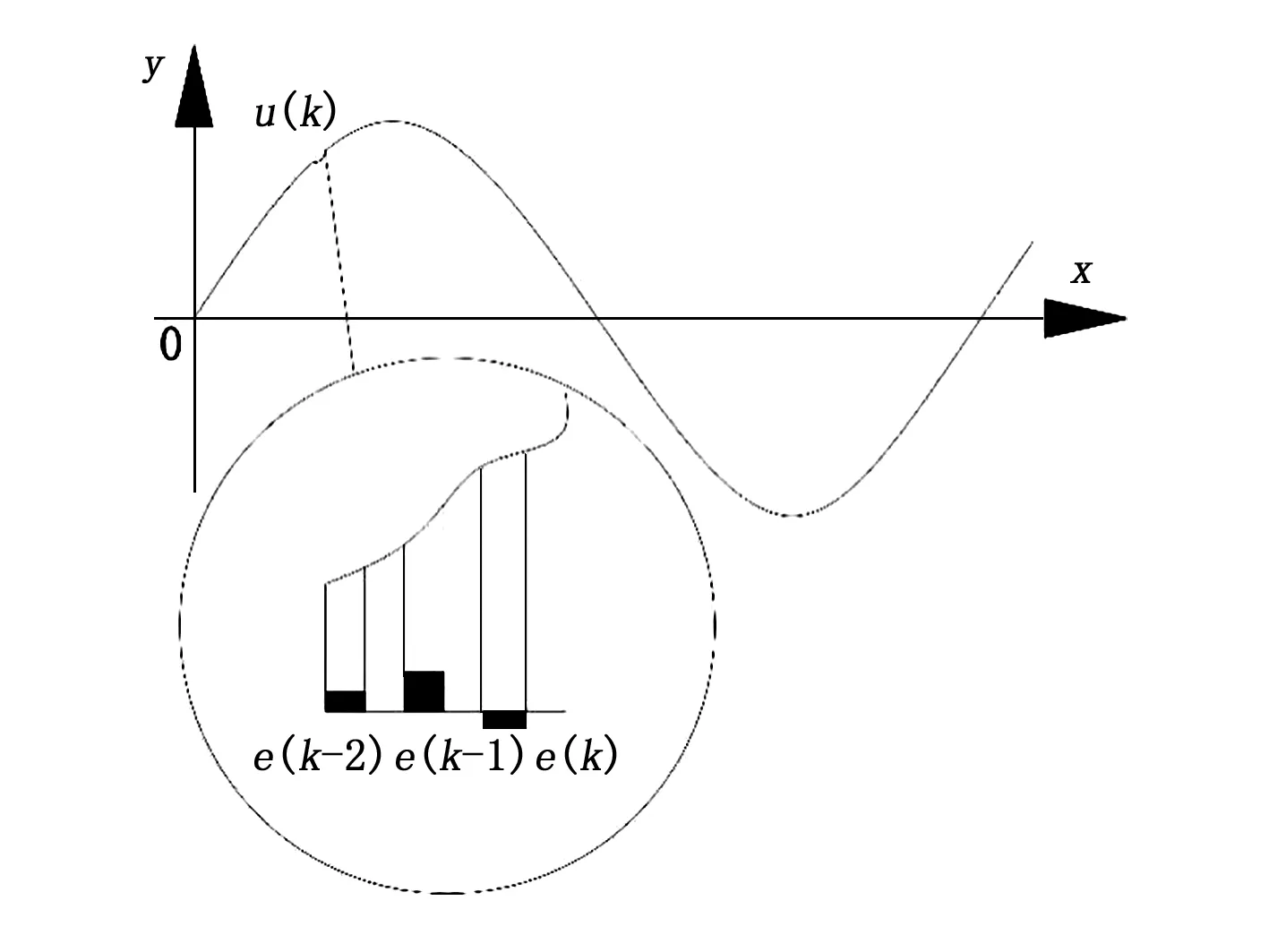
图6 增量型逐点数字补偿原理
图6显示,采用增量式数字补偿算法后,在一个信号波形点的输出过程中,系统实时进行了3次AD数字采样,计算补偿量,并且实时修正输出值。与位置式数字补偿算法需要按周期采样补偿方式比较,此方式对系统输出补偿的实时性、有效性才是最优的。式(1)、式(2)、式(3)均需剩上“δ”综合补偿因子,用于补偿器件参数引入的误差补偿,其取值由系统实测参数决定,但其范围需控制在0.9~1.1之间,否则表示升压器、高压PT等器件应用参数偏离了实际需求,要更换器件才能满足系统实际应用特性要示。
3 采用M语言仿真
数字补偿技术位置式PID控制框图如图7所示。
根据位置式PID控制算法得到其程序框图如图8所示。
在仿真过程,对输出值u(k)进行限幅:[-1,+1]。所用方法通过核心处理器及DSP数字运算器实现D/A控制,符合数字实时控制的真实情况。
由于被控对象为升压器、升流器、容性负载组成的二阶函数对象模型,其传递函数为
(4)
式中:L为感抗,取值约0.8 H;C为负载容抗,取值1.2×10-9;R取值1;s为频域变量。

图8 位置式PID控制算法程序
采用Matlab中求微分方程数值解的函数ODE45的方法求解连续对象方程,输入指令信号u0=sin(2πt),采用PID控制算法,其中:kp取值18;ki取值0.1;kd取值0.5。PID正弦跟踪结果如图9 所示。
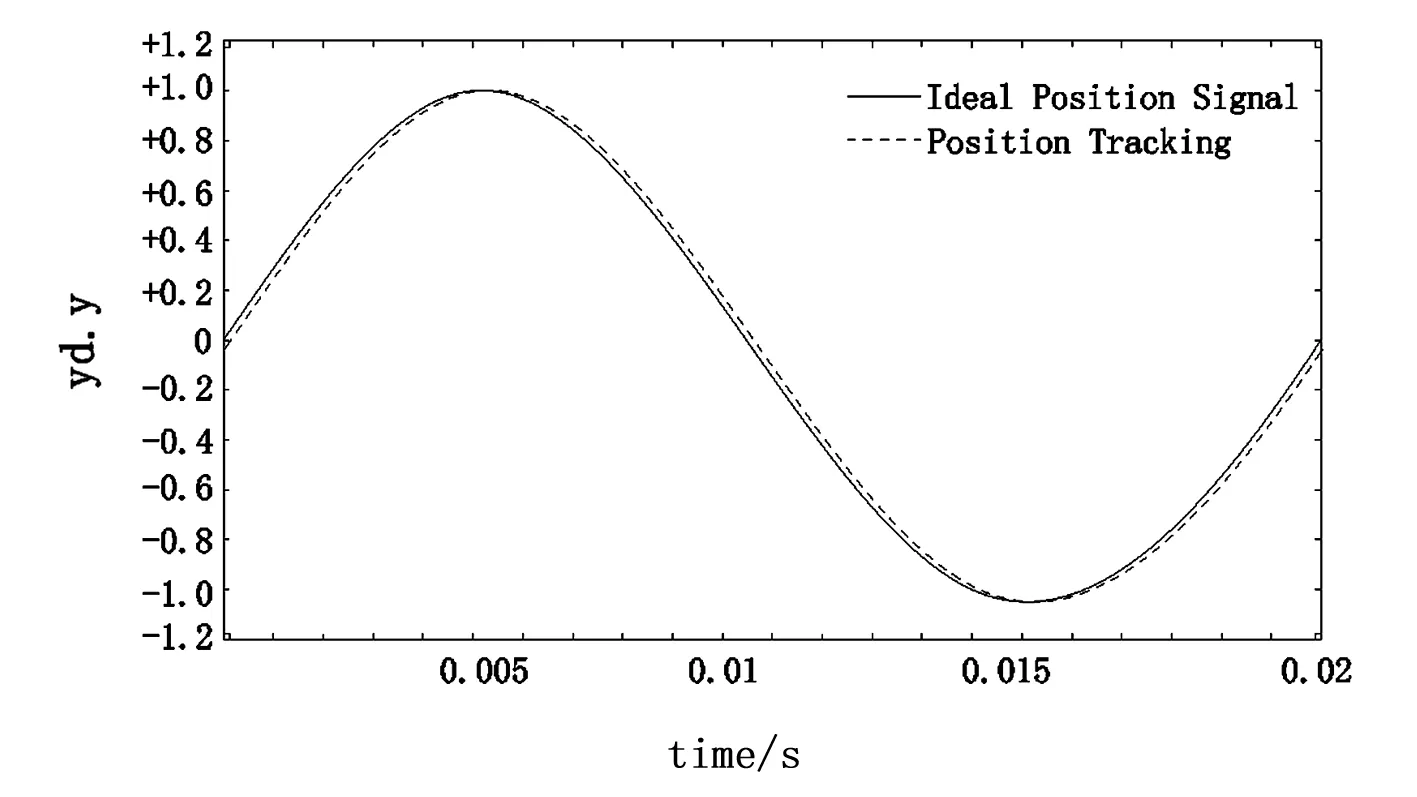
图9 PID正弦跟踪
4 两种数字补偿比对
通过Matlab仿真,结果显示采用位置式数字补偿算法的周期性逐点补偿方式与采用增量型数字补偿算法的实时逐点补偿方式相比较而言,阶跃跟踪特性后者明显优于前者,此现象说明采用增量型数字补偿算法更适合于所提方案的实现,阶跃跟踪图如图10、图11所示。
5 结 语
通过原理分析、试验验证及仿真结果综合比对
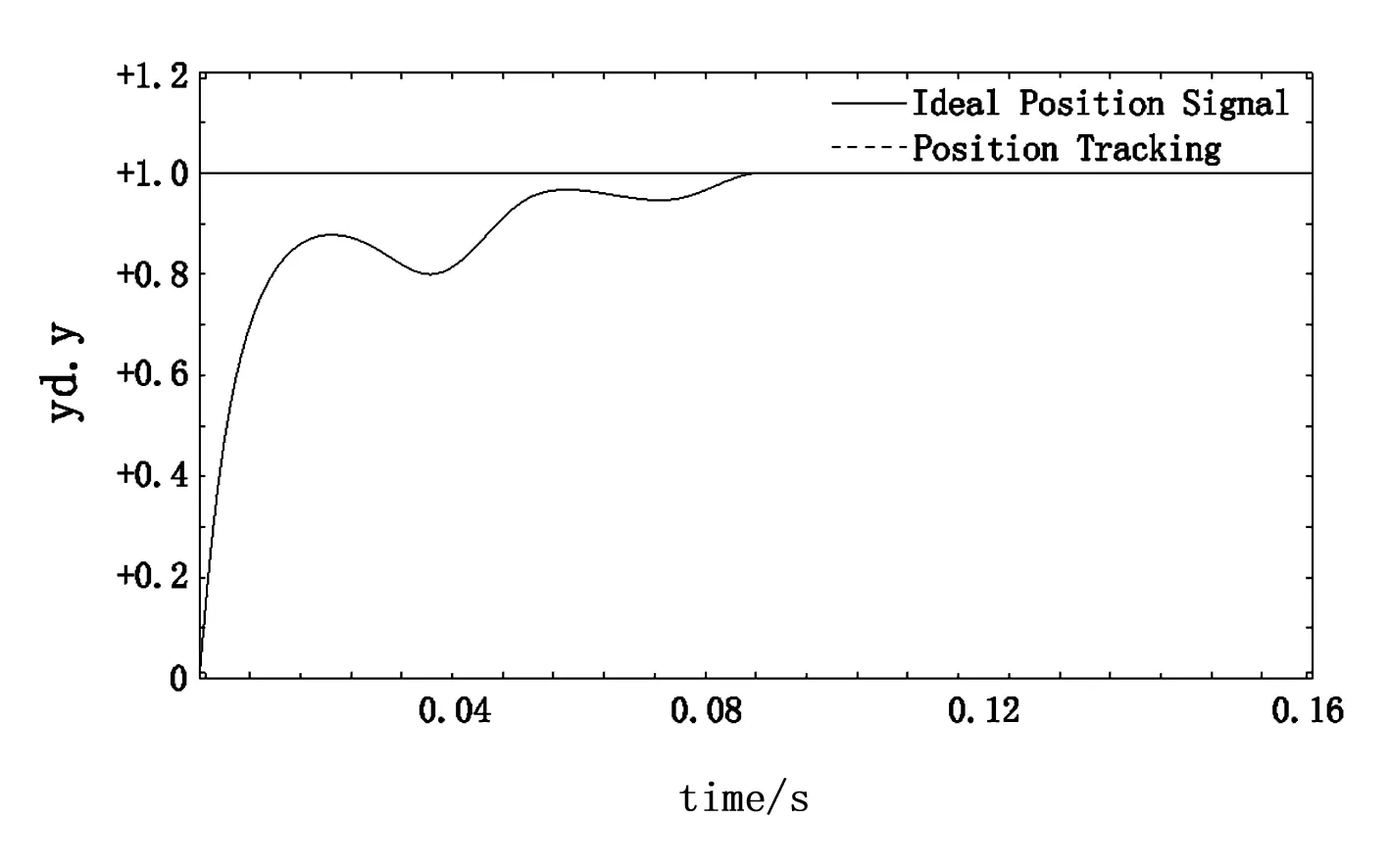
图10 位置式数字补偿算法阶跃跟踪
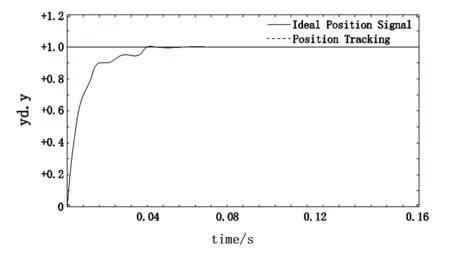
图11 增量式数字补偿算法阶跃跟踪
表明,所提出的利用现代数字合成及高速数字采样技术,以逐点补偿方式修正功率源输出波形的设计方案,使高压电能计量装置输出的波形信号失真度指标大幅改善,因此,该方案是有效可行的。同样的负载情况所提失真度指标对比,采用所提方案之后,两者的误差值改善达到10倍以上,原有失真度指标将由THD=2%提升至THD<0.2%。失真度指标的改善使得现有高压电能计量装置能为高压电能表提供更准确、更有效的功率源信号,为计量检测单位准确检测高压电能表提供了有效的保证。
同理,所提技术方案也可广泛应用于改善其他检测领域中由于功率源带负载过重引起的功率源波形失真问题。
[1] 李友善.自动控制原理[M].北京:国防工业出版社,1990.
[2] 胡寿松.自动控制原理(第四版)[M]. 北京:科学出版社,2001.
猜你喜欢
数学小灵通(1-2年级)(2021年11期)2021-12-02
中学生数理化·中考版(2019年12期)2019-09-23
测控技术(2018年2期)2018-12-09
雷达学报(2018年5期)2018-12-05
电脑知识与技术(2018年30期)2018-01-04
科技创新与应用(2017年12期)2017-05-08
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年3期)2016-03-26
焊接(2016年5期)2016-02-27