基于传递特性的行星齿轮耦合故障研究★
2018-07-06 07:08:30徐亚南徐玉秀
机械管理开发 2018年6期
徐亚南, 徐玉秀
(1.天津工业大学 机械工程学院, 天津 300387; 2.天津工业大学 现代机电装备技术重点实验室,天津 300387)
引言
由于风机齿轮箱工况复杂,易发生两种及以上的耦合故障,其实验信号中表现出了区别于两种单独故障时的故障特征。常用的时频分析方法难以满足对耦合故障中行星齿轮故障特征的识别。
在进行齿轮箱故障识别与诊断工作时,国内外学者大多从齿轮箱传动系统动力学建模、箱体表面振动响应的信号处理和齿轮箱系统传递特性研究三方面入手,通过建立刚柔耦合动力学模型,求解得到了内部动态激励信号[1],推导出行星齿轮箱振动信号方程式,并进行相应的频谱分析[2-3]。在基于行星齿轮箱传递机理上,建立了单级行星齿轮齿轮传动系统的振动信号模型。对于行星齿轮公转调制作用而产生的动态信号[4],建立信号传播模型,应用最小二乘法类似方法,对信号传播模型进行参数估计,得到单一故障、耦合故障状态下多信号传播路径的传递函数。
1 风机齿轮箱模拟实验
由于风电齿轮箱信号采集存在一定困难,所以采用图1所示的模拟试验台作为研究对象,1为电机,2为转频调节器,3为定轴齿轮箱,4为测点,5为行星齿轮箱,6为负载加载器。通过对试验台的研究,能模拟出正常、故障状态下的运行状态。
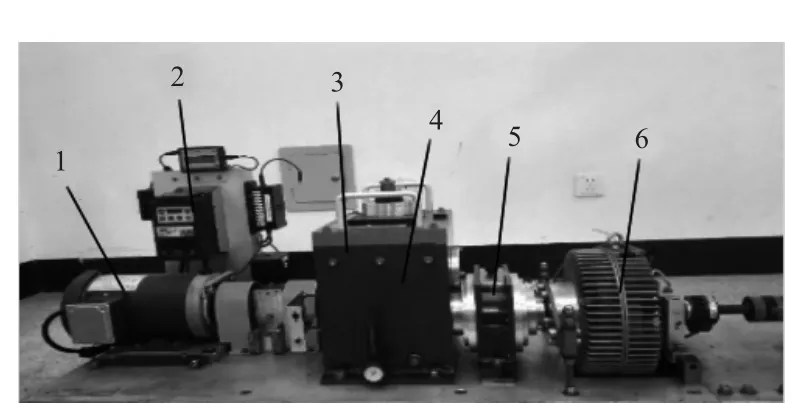
图1 齿轮故障模拟试验台
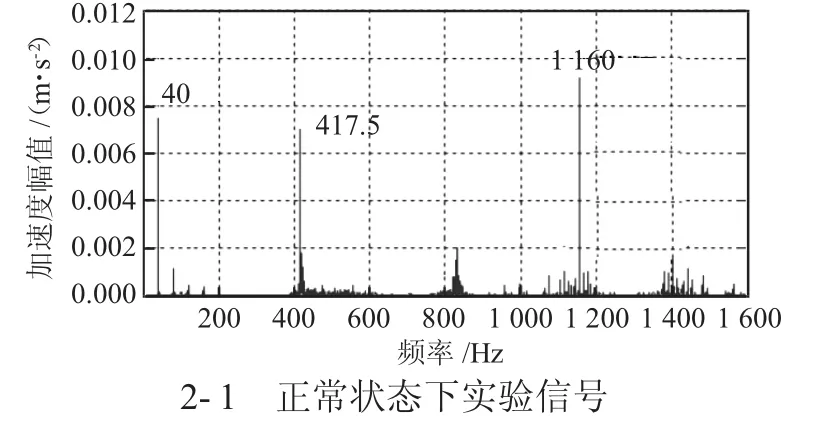
通过以故障齿轮替代正常齿轮的方法,分别实验并测取正常状态、行星齿轮缺齿状态、行星齿轮均匀磨损状态、行星齿轮缺齿-行星齿轮磨损的耦合状态下齿轮箱箱体表面加速度响应信号。试验时,输入轴转频fd=40 Hz,输出轴加载电压为10 V,加速度传感器灵敏度为100.2 mV/(m·s-2)。通过计算可知该转频下各级啮合频率分别为高速级啮合频率f1=1160 Hz、中速级啮合频率f2=417 Hz、低速级啮合频率f3=101.5 Hz。
通过观察图2中正常信号2-1与下页故障信号2-2、2-3、2-4可知,当行星齿轮发生缺齿故障时,引起行星齿轮啮合频率101.5 Hz幅值的升高,同时280 Hz幅值也发生了升高。当发生行星齿轮磨损故障时,除406 Hz被激起外,1200 Hz也升高明显。当发生两种故障同时存在的耦合故障时,除40 Hz、101.5 Hz、406 Hz以及1200 Hz的增高外,还存在异于两种单独故障时的故障频率460 Hz的发生。由于故障并不是线性叠加,该故障频率的产生无法通过正常频谱分析解释,因此引入传递函数进行分析。
2 齿轮故障模拟试验台仿真模型
由于故障齿轮模拟实验只能获取箱体表面的振动信号,对于箱体内部齿轮相互啮合时的接触力信号无法直接通过传感器测量获取,因此需要通过动力学仿真的方式对风机传动系统进行建模。为满足建模精度要求,采用建模软件UG进行试验台建模,通过ADAMS/Exchange接口与专业的动力学仿真软件ADAMS进行数据转换。在建模时,为了提高精度,将定轴齿轮箱及行星齿轮箱与轴的接触点设为刚性区域,其他部分为柔性区域。
对于建立好的传动系统刚柔耦合模型,对其进行Dynamic仿真,提取正常状态、两种单故障状态以及行星齿轮缺齿-行星齿轮均匀磨损耦合故障状态下齿轮箱中高速级啮合、中速级啮合、低速级内外啮合的接触力模拟信号。
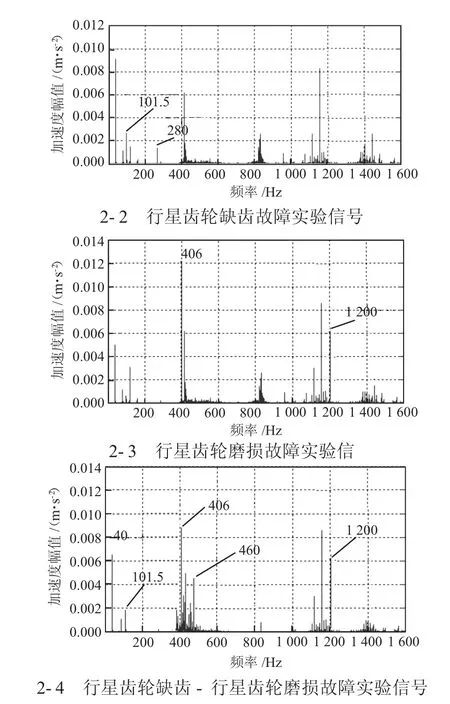
图2 各工况下实验信号
3 传递函数及ARX模型选择求解
3.1 传递函数的定义
对于实际的振动系统来说,建立系统的多自由度振动微分方程,得:

式中,[Kg]为复刚度矩阵。并对公式(1)进行拉氏变换,得:

式中,[Z(s)]为系统的动刚度。在一定的激励作用下,动刚度与系统的响应{X(s)}成反比,即动刚度会阻碍的系统振动,故又称[Z(s)]为系统的机械阻抗,其倒数称为传递函数,用[H(s)]表示,即:

由公式(1)得:

对于实际的振动系统来说,用ω代替s,不会失去有用的信息,故对公式(2)两边进行傅氏变换,得:

3.2 传递函数ARX模型的选择及求解
对于给定的系统,可以通过选择时域响应或频域响应,对系统进行辨识。由于连续的系统传递模型在拟合时存在解不唯一或拟合结果不稳定等缺点,通常不对连续模型直接辨识,更多的是将连续的系统模型进行离散化处理,通过系统辨识获得离散的传递函数后,再对离散模型进行连续化处理[5]。
离散系统传递函数为:

它对应的差分方程为:

式中:ε(t)为残差信号,这里为方便起见,输出信号简记为 y(t),且用 y(t-1)表示输出信号 y(t)在前一个采样周期处的函数值,这种模型又称为自回归历遍模型(ARX模型)。
对于多输入单输出ARX模型,其对应的差分方程为:

式中:d 为各个延迟构成的矩阵;A(z-1)和 B(z-1)均为p×q多项式矩阵,且
即拉氏域内的传递函数变为傅氏域内的频响函数。传递函数由系统本身所决定的,与输入量没有关系。当获取系统的传递函数之后,可以根据输入量获取系统的输出量,或者可以根据所需的输出量来求取输入量。通过频响函数[H(ω)]可充分描述系统的动态特性。
系统辨识常用的软件为MATLAB,其优点在于内置辨识工具箱中包含各类系统辨识模型,并且拥有强大的计算能力。本文所运用的ARX模型辨识系统可以通过函数arx()实现,在确定了分子多项式阶次m-1,分母多项式阶次n以及系统纯滞后d之后,使用arx()函数可以直接辨识出系统的Ai和Bi矩阵。
4 故障特征传递特性分析
4.1 传递函数分析
以正常状态、行星齿轮缺齿故障状态、行星齿轮均匀磨损故障状态、行星齿轮缺齿-行星齿轮均匀磨损耦合故障状态的啮合接触力为输入信号,各种状态的实验信号为输出信号,分别建立以上四种状态下的传递函数,如图3所示。
比较图3-2和3-1,当发生行星齿轮缺齿故障时,高速轴转频fd(40 Hz)幅值增加,同时未知频率280 Hz幅值也发生升高。
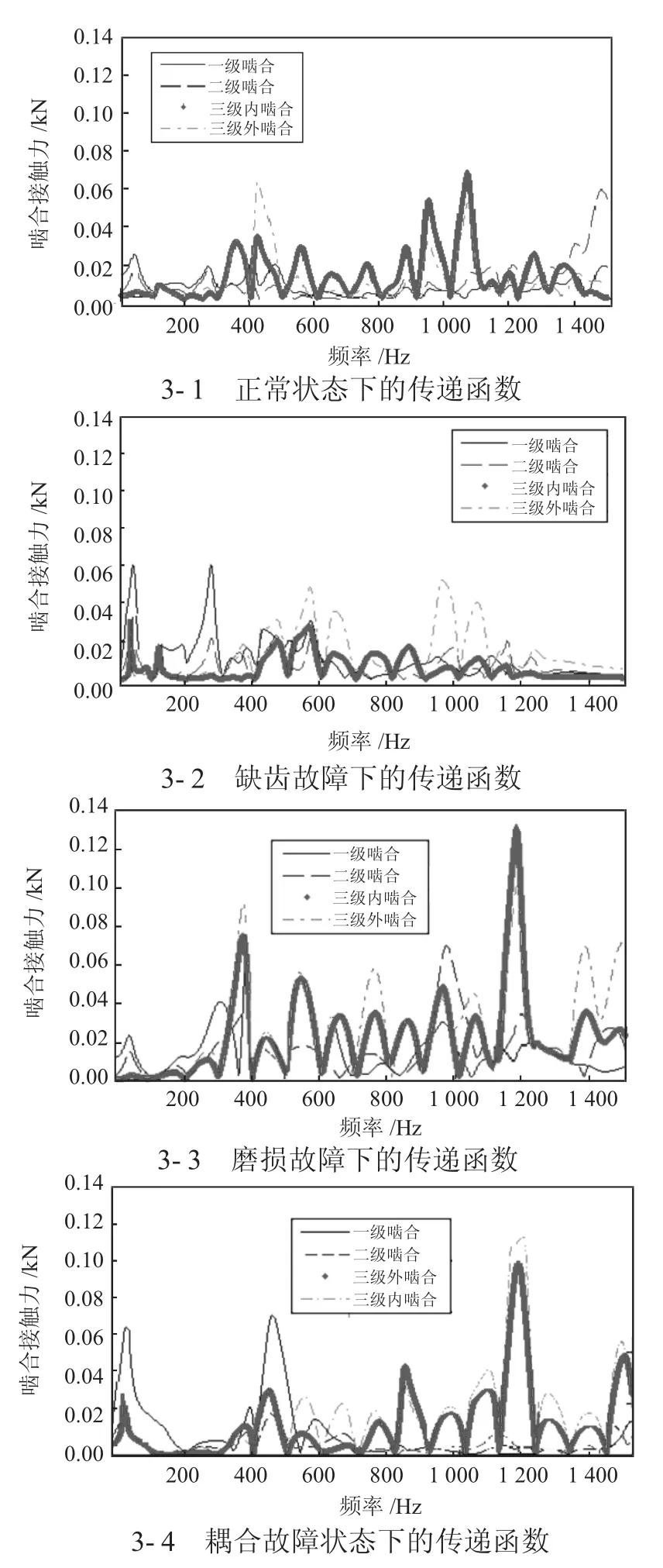
图3 各状态下的传递函数
比较图3-3和3-1,当发生行星齿轮单磨损故障时,未知频率406 Hz以及1200 Hz幅值增大。通过简单计算406 Hz恰好为低速级啮合频率f3(101.5 Hz)的四倍频。
比较图3-4和3-1,当发生行星齿轮缺齿-行星齿轮均匀磨损耦合故障时,主要的故障特征频率有 40 Hz、406 Hz、460 Hz和 1200 Hz。
传递函数中表现出了与频谱相一致的特征频率,验证了传递函数的正确性。通过以上分析,280 Hz为行星齿轮缺齿所特有的故障频率,406 Hz为均匀磨损所特有的故障特征频率,460 Hz为耦合故障所特有的故障频率,因此针对这几个频率,对其贡献量进行详细分析。
4.2 贡献量分析
为了更清楚地描述传递函数中各频率的产生原因,分别对各故啮合接触力在故障频率处的贡献量进行分析,如图4所示。
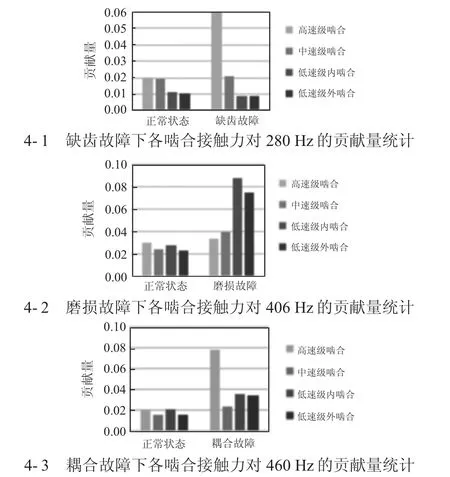
图4 不同状态下各啮合接触力对特定频率贡献量统计
通过图4-1可知,在280 Hz处,高速级啮合接触力贡献量由正常状态下的33%增加到66.3%,缺齿故障引起了高速级啮合接触力传递路径的改变。
通过图4-2,在406 Hz处,低速级内啮合接触力和外啮合接触力分别由正常状态下的26.1%和22.4%升高到37.1%和31.6%,即由于行星齿轮均匀磨损故障,引起了低速级内、外啮合接触力传递路径的改变。
通过图4-3可知,当发生耦合故障时,在460 Hz处高速级啮合接触力由正常状态下的28.2%升高到45.9%,即由于耦合故障的发生,导致高速级啮合接触力传递路径的改变。对于耦合故障,由传递函数不难发现,在400 Hz到500 Hz左右的频率范围内,高速级啮合所对应的接触力对传递路径的贡献量最大,说明行星齿轮耦合故障发生时对高速级啮合振动造成了一定影响,引发了460 Hz幅值的增大。
5 结语
通过ARX模型,建立了正常状态、行星齿轮缺齿、行星齿轮均匀磨损和行星齿轮缺齿-行星齿轮均匀磨损耦合故障状态下的传递函数。通过对两种单故障的分析,引出了耦合故障中的连带故障特征频率460 Hz。通过对各类故障传递函数中各啮合接触力幅值及贡献量的变化情况,总结了耦合故障的传递特性,解决了460 Hz的来源问题,实现了对行星齿轮缺齿-行星齿轮均匀磨损该耦合故障的诊断。
[1]徐玉秀,赵晓菲,熊一奇.基于传递路径的多级齿轮箱齿轮裂纹故障识别[J].仪器仪表学报,2016(5):1018-1024.
[2]Inalpolat M,Kahraman A.A theoretical and experimental investigation of modulation sidebands of planetary gear sets[J].Journal ofSound and Vibration,2009,323(4):677-696.
[3]Inalpolat M,Kahraman A.A dynamic model to predict modulation sidebands of a planetary gear set having manufacturing errors[J].Journal ofSound and Vibration,2010,329(4):371-393.
[4]熊一奇,徐玉秀.基于信号传播模型的行星齿轮缺齿故障识别[J].仪器仪表学报,2016(2):249-255.
[5]齐晓慧,田庆民,董海瑞.基于Matlab系统辨识工具箱的系统建模[J].兵工自动化,2006,25(10):88-90.
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:36
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
测控技术(2018年7期)2018-12-09 08:58:46
读者(2018年20期)2018-09-27 02:44:48
制造技术与机床(2017年4期)2017-06-22 11:17:44
光学精密工程(2016年4期)2016-11-07 09:05:39
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
风能(2016年12期)2016-02-25 08:45:56
电测与仪表(2014年11期)2014-04-04 09:21:20