基于DSP的手势电视机遥控器设计
2018-07-05 03:51:02王梨英
信息记录材料 2018年8期
王 勇 ,王梨英
(1湖南铁道职业技术学院 湖南 株洲 412001)(2中车株洲电力机车有限公司 湖南 株洲 412001)
1 引言
手势识别技术是当前研究的热点技术,通过高速的摄像头采集手势信息,并对手势信息进行匹配,解析手势的潜在意义,通过解析后,将解析的信息转化为控制命令,从而进行相应的操作。由于当前对于人工智能控制的需求,人们对于方便快捷的手势识别技术产品需求旺盛,特别是在手机电视遥控领域,本文将通过对当前需求的分析,完成一款手势识别控制的遥控器设计。
2 系统方案设计
系统主要的三个功能模块是DSP系统处理模块、手势识别模块、红外遥控模块。摄像头采集模块采集手势信息,进行手势识别,红外遥控按键识别,所有采集的信息通过DSP中央处理器进行数据处理,最后在上位机进行显示,此外,该设备还具有声光报警等功能。系统结构如图1所示。
3 硬件设计
3.1 红外遥控模块电路
系统红外遥控模块电路原理图2所示。
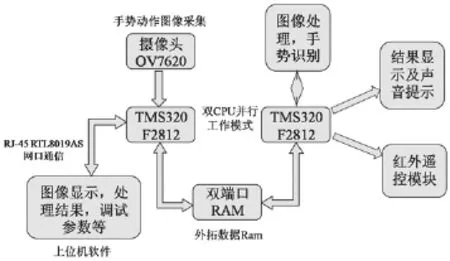
图1 手势电视机遥控器的系统结构
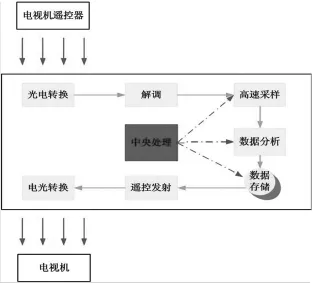
图2 红外遥控模块原理框图
其工作原理是电视机遥控器发送信号后,接收部分接受到信号后进行信号的光电转换、信息解调、由中央处理器对信号进行高速采集,然后对信息进行分析处理后存储,通过遥控发射模块进行发射后,通过光电转换后控制电视机。
3.2 显示电路设计
为了人机界面的友好,系统设计了液晶显示模块。硬件连接图如图3所示。

图3 12864液晶屏与DSP2的硬件连接图

图4 图像处理部分算法流程图
4 系统软件设计
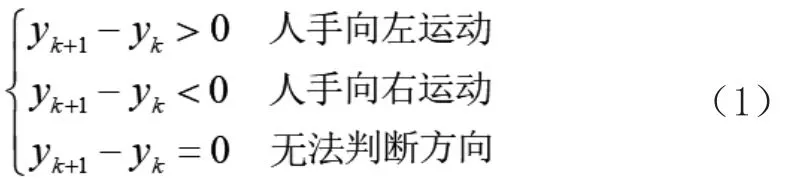
图像处理和特征提取、判断方向部分的流程图如图4所示。
(1)Hk+1(x,y)和Hk(x,y)是相同的纵向摆放位置,手部在左右运动;
(2)根据列坐标的大小来判断手左右方向的移动如下:
判断上下运动的算法与判断左右类似。
(1)Hk+1(x,y)和Hk(x,y)是相同的横向摆放位置,手部在上下运动;
(2)根据横坐标的大小来判断上下方向的移动如下:
5 系统测试与结论
系统设计完成后,进行了前后左右20次的手势测试,测试时能正确识别手势,完成对电视机的控制,经过试验测试,准确率高,设计可行
[1]王松林.基于Kinect的手势识别与机器人控制技术研究[D].北京交通大学硕士学位论文,2014年.
[2]王志红.基于视觉手势识别的机械手操控系统的研究[D].天津工业大学硕士学位论文,2017年.
[3]陈彬彬.基于视觉的字母手势识别技术研究及实现[D]西安交通大学硕士学位论文,2017年.
[4]凌晨.基于Kinect的复杂手势识别技术研究[D].南京理工大学硕士学位论文,2016年.
猜你喜欢
作文大王·低年级(2020年9期)2020-10-12 02:41:03
作文大王·低年级(2020年9期)2020-10-12 02:41:03
知识就是力量(2019年12期)2019-01-14 02:52:47
小学生作文(低年级适用)(2018年9期)2018-10-08 02:29:42
厦门理工学院学报(2018年3期)2018-08-08 07:44:28
阅读与作文(小学高年级版)(2017年10期)2017-10-11 07:57:18
创新作文(小学版)(2017年29期)2017-04-04 02:04:12
海外星云(2016年17期)2016-12-01 04:18:38
人生与伴侣·共同关注(2015年22期)2015-05-30 10:48:04
河北遥感(2014年4期)2014-07-10 13:54:59