舰载雷达系统误差模型分析
2018-07-04 11:07李双霖
现代工业经济和信息化 2018年7期
李双霖
(中国电子科技集体公司第二十研究所, 陕西 西安 710068)
引言
雷达系统误差可以通过一定的方法加以消除,在多源传感器信息融合过程中,通过误差配准,可以有效减小雷达系统误差对融合精度的影响。研究分析雷达探测系统误差产生的原因及其变化规律,对系统误差特性进行分析,建立更加准确的系统误差模型,有助于提高系统误差配准精度[1]。
1 舰载雷达系统误差模型
1.1 舰载雷达系统误差传递过程
影响雷达系统误差的因素主要包括:
1)雷达原始测量系统误差,主要是雷达本身因技术体制局限、设计缺陷等引起的测量偏差,包括距离误差、方位角误差、俯仰角误差[2];
2)安装角误差,主要是由于雷达的天线在安装时存在一定的偏差,与载体轴线不严格重合,使得传感器球坐标系向舰艇甲板坐标系转换时引入误差;
3)舰艇姿态误差,主要是由于综导设备测量舰艇姿态时存在系统误差,使得舰艇甲板坐标系向舰艇地理坐标系转换时引入误差。
通过分析舰载雷达探测过程,可知雷达探测系统误差的传递过程如图1所示。
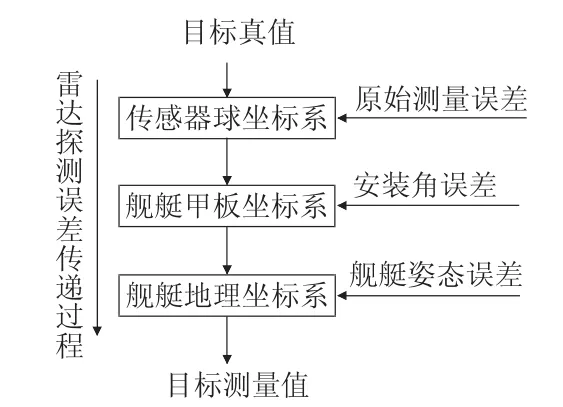
图1 雷达探测系统误差传递过程
1.2 舰载雷达常用坐标系
舰载雷达常用的坐标系有传感器球坐标系、舰艇甲板坐标系和舰艇地理坐标系等。
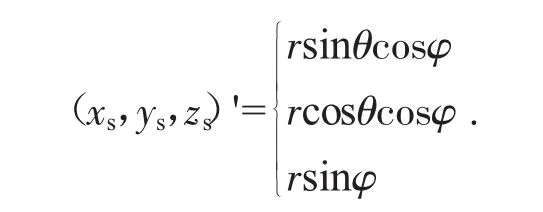
1)传感器球坐标系:原点位于传感器中心的极坐标系,目标位置表示为相对传感器的距离、方位、俯仰。
2)舰艇甲板坐标系:原点位于舰艇摇摆中心的空间直角坐标系,Y轴平行于艏艉线,舰艏方向为正,X轴垂直于Y轴且平行于甲板,右舷方向为正,Z轴垂直于甲板向上。
3)舰艇地理坐标系:原点位于舰艇摇摆中心的空间直角坐标系,X轴平行于水平面指向正东,Y轴平行于水平面指向真北,Z轴垂直于水面向上[3]。
各坐标系之间的转换关系如下:
1)传感器球坐标系转换到传感器测量坐标系。
假设传感器球坐标为(r,θ,φ),则传感器测量坐标为
2)传感器测量坐标系转换到舰艇甲板坐标系。
主要是由三个欧拉角(α,β,γ)的旋转变换矩阵和传感器到甲板中心基线的平移向量组成
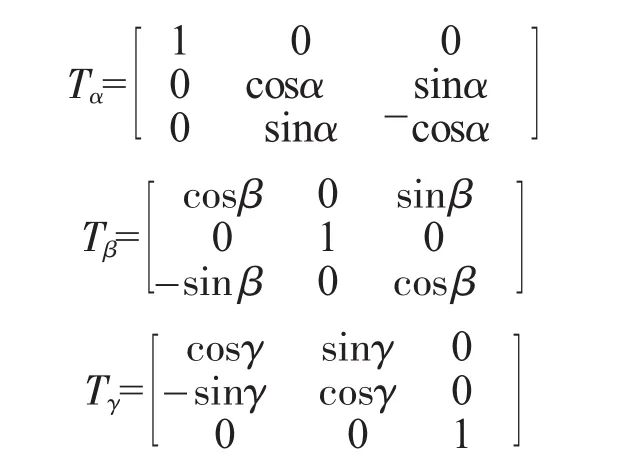
旋转变换顺序为先Z轴再X轴最后Y轴。
3)甲板坐标系到舰艇地理坐标系。
主要是由纵摇角(艏高为正),横摇角(右舷高为正),艏向角(顺时针为正)组成旋转矩阵组成[4]。
2 仿真分析
下面通过仿真分析雷达安装角误差及舰艇姿态误差对舰载雷达系统误差的影响。
1)雷达安装角误差对系统误差的影响。
通过引入不同的雷达安装角误差,得到雷达系统误差分布特性如图2、3所示。

图2 雷达安装俯仰偏差对系统误差的影响
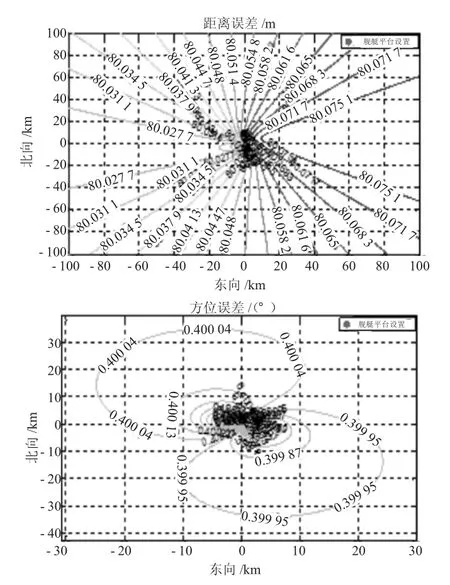
图3 雷达安装方位偏差对系统误差的影响
2)舰艇姿态误差对系统误差的影响。
通过引入不同的舰艇姿态误差,得到雷达系统误差分布特性如图4、5、下页图6所示。
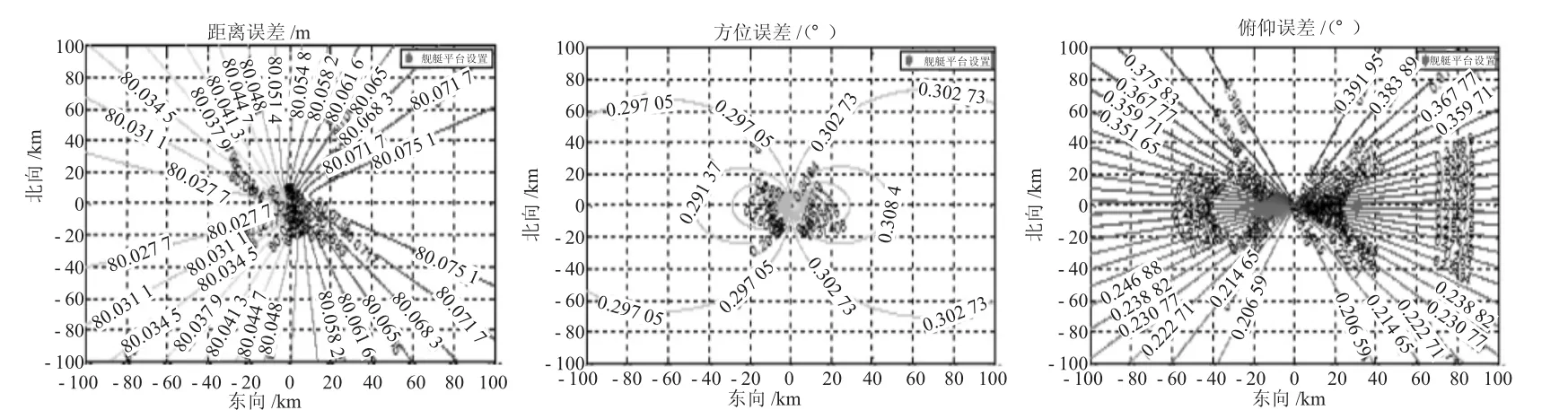
图4 舰艇纵摇偏差对系统误差的影响

图5 舰艇横摇偏差对系统误差的影响
3 结语
从仿真结果可以看出,雷达安装俯仰偏差及舰艇纵摇偏差主要对俯仰误差影响较大,表现为艏艉方向俯仰误差与所加安装俯仰偏差及舰艇纵摇偏差呈线性叠加关系,舰艇左右方向俯仰误差影响较小;舰艇横摇偏差主要对俯仰误差影响较大,表现为舰艇左右方向俯仰误差与所加安装俯仰偏差及舰艇纵摇偏差呈线性叠加关系,艏艉方向俯仰误差影响较小;雷达安装方位偏差及舰艇艏向偏差主要对方位误差影响较大,表现为雷达原始测量误差与所加安装方位偏差及舰艇艏向偏的线性叠加。
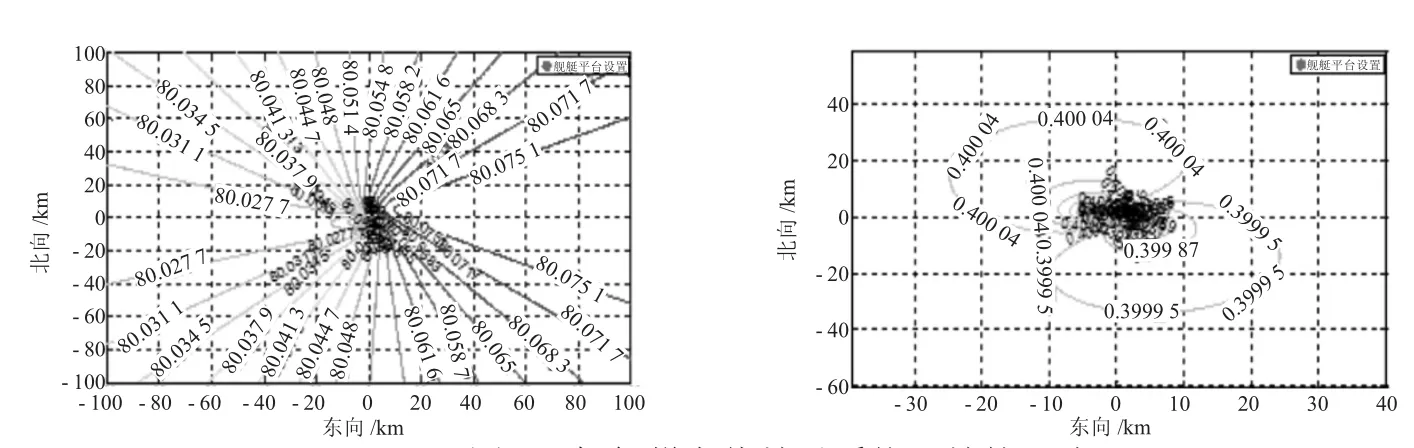
图6 舰艇艏向偏差对系统误差的影响
[1]胡波,梁星霞,练学辉.雷达系统误差的测量和修正方法[J].雷达与对抗,2005(2):12-15.
[2]曾文军,曾小雨,郑娟等.多雷达定位误差简析[J].高等函授学报,2008(10):57-59.
[3]郑朝晖,许铁砚.相控阵雷达的测角误差分析[J].现代导航,2010(2):51-53.
[4]赵宗贵.多雷达系统误差估计原理与实现[J].现代电子工程,2003(3):1-12.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
国防(2017年12期)2017-04-09
中学生理科应试(2017年2期)2017-04-01
装备环境工程(2015年5期)2015-02-28
军事体育学报(2014年3期)2014-02-27