深海潜标观测数据无线实时传输系统设计
2018-07-03 07:54:50徐立军侯朝焕鄢社锋张震曾迪
电信科学 2018年6期
徐立军,侯朝焕,鄢社锋,张震,曾迪
深海潜标观测数据无线实时传输系统设计
徐立军1,2,侯朝焕1,鄢社锋1,2,张震1,曾迪1
(1. 中国科学院声学研究所,北京 100190;2. 中国科学院大学,北京 100190)
针对深海潜标数据实时传输的需求,设计了一种无线数据实时传输技术方案,实现在长达一年时间内对深海潜标流速数据的实时获取。由于水介质和空气介质的不同,该方案在水下和水上采用了不同的数据通信传输技术,其中在水下采用了无线水声通信方式实现深海潜标数据实时获取,而在水上则采用铱星通信的方式将数据中继回传到陆地的监控中心,该系统设计完成后在西太平洋深海潜标上进行了实际应用,并经过了长时间的稳定运行。实际运行过程表明,该系统完全能够实现潜标数据实时获取功能,在多种海况条件下表现出优异的可靠性和稳定性。
水声通信;深海潜标;实时传输
1 引言
深远海数据的连续和实时观测能力建设对海洋与气候预报和海洋环境安全保障意义重大[1]。深海观测数据的长时间连续积累和实时化传输,将加快我国海洋与气候预报和环境保障业务系统建设步伐,提升我国深海探测和科学研究能力,为实施“21世纪海上丝绸之路”倡议、保障国家海洋环境安全提供重要基础支撑[2]。长期以来深海潜标数据获取主要通过长时间布放潜标后,返回布放现场回收潜标,以获取过去一段时间的观测数据,这种工作模式降低了海洋观测数据的时效性,无法满足短期内获取观测数据的实际需求,因此如何实现潜标的数据实时获取是物理海洋科学家迫切需要解决的问题。美国在20世纪80年代就开始尝试实时获取CTD(盐度、温度、深度)和流速等传感数据,1986年美国新罕布什尔大学[3]为了监测缅因湾口的水质季节变化,利用磁感应传输对水下CTD数据进行了实时获取,在6个月时间内获取了水深270 m的CTD数据。美国科学家后来相继开展利用磁感应传输技术获取海洋观测数据的研究,包括实时获取北极水面下1 000 m CTD剖面[4]、水下地震和火山低频噪声采集器时间同步[5]、监测鱼类和浮游生物[6]等。磁感应传输获取水下数据具有比较高的功耗效率比,但是由于设备间需要通过钢缆连接,连接缆重力较大,需要匹配浮力设备,因此不适合几千米长距离的水下数据实时传输。水声通信是目前水下远距离无线通信的唯一手段,为了进行大水深条件下水下数据获取,科研机构开始尝试采用水声通信技术进行水下观测数据的实时获取。在1990年,美国WoodsHole海洋研究所就尝试采用水声通信技术将多个水下设备数据传到浮标[7],然后通过卫星中继到岸站基地,该系统对水下300 m、1 500 m和2 900 m 3套设备,这是一次典型的水下无线数据获取尝试,实际应用过程中仅有1 500 m水深的通信机正常工作,该通信机采用非相干通信技术,通信速率为600 bit/s,平均误码率为0.1%。在20世纪90年代,美国国家大气海洋管理局也尝试了利用水声通信获取水下温盐深流等参数的实验[7],采用非相干点对点通信,速率同样是600 bit/s,工作时长5个月。鉴于非相干水声通信技术的日渐成熟,非相干通信一直应用于水下数据的无线获取应用[8-11]。进入21世纪以来,物理海洋领域对水下观测数据实时回传的需求日益增大,要求水下设备进行声传输时有更高的能源利用率,与此同时水声通信技术快速发展,通信速率更高、每比特能耗更低的相干水声通信开始应用于水下设备数据实时传输[12-13]。除水声通信技术外,国内在水下观测数据实时传输领域还尝试了在长电缆上利用电信号进行水下长距离有线传输[14-15]。目前实际运行的实时化系统主要分布在近岸、河口等地,在远海大洋布放的潜标实时化鲜有报道。在深远海观测领域,国内外均有布放在深海大洋的潜标观测阵列,其中应用规模较大的有中国科学院海洋研究所的西太平洋潜标观测阵列和美国国家海洋大气管理局(NOAA)以及美国国家潜标数据中心(National Data Buoy Center)的TAO潜标阵列。
中国科学院战略性先导科技专项“热带西太平洋海洋系统物质能量交换及其影响”于2013年启动,构建西太平洋科学观测网是专项的重点任务之一。西太平洋科学观测网的建设目标是实现对西太平洋赤道主流系及其与西边界流关联区、中深层环流大规模同步连续现场观测,填补国际上在西太平洋赤道流系和中深层环流同步观测的空白[1]。中国科学院海洋研究所为了打破以往一年回读数据的弊端,提高潜标观测数据的时效性,在2016年开始委托中国科学院声学研究所进行潜标数据实时化传输改造,目的是能够在长达一年的时间内实时获取水面以下1 000 m的流速剖面数据。
实现深海潜标长期实时数据获取的主要技术难点如下所示。
• 数据实时回传系统需要具有极高的工作可靠性,符合海洋工程应用条件,能够在大风、强流以及高浪涌等多种恶劣海况条件和天气条件下保持长期稳定工作。这需要设备组成结构和设备间的连接部件耐压、耐海水腐蚀、抗冲击,设备运行的软、硬件均能够保证长期稳定工作。
• 该系统处于长期自主工作状态,需要具备稳定的能源获取途径,同时该系统应该具有功耗控制模式,能够保持在远离陆地条件下依靠自身能源供应长期工作。
• 数据实时回传系统需具有易组装、易维护、易布放、易回收的工程应用特点。深海潜标布放点远离陆地,无法像陆地设备获得可靠的技术保障和支持,而且深海潜标的工作海区通常在大洋深处,海深较大、海况比近岸海域更加恶劣,因此该系统的组装、布放和回收操作要简单、快捷。
根据以上需求和实际应用难度分析,结合的海洋工程经验,中国科学院声学研究所提出了水声通信和铱星通信两种不同无线通信方式,通过系统集成后,研制出一整套潜标实时化数据传输系统,并进行了海上试验应用。
2 潜标无线实时化数据传输系统设计
2.1 总体方案结构
潜标无线实时化数据传输系统工作方式如图1所示,该系统包括水下通信分系统、水面通信分系统两个部分。水下通信分系统包括潜标传感器、水声通信机和电源系统。水面通信分系统包括水声通信机、卫星定位通信系统和电池系统。由于空气介质和水下介质两种不同的信道特质,该系统通信链路分为水上和水下两个部分,水上采用卫星通信,水下采用水声通信的无线通信技术方案,潜标传感器和水声通信机之间通过水密电缆进行数据交换。
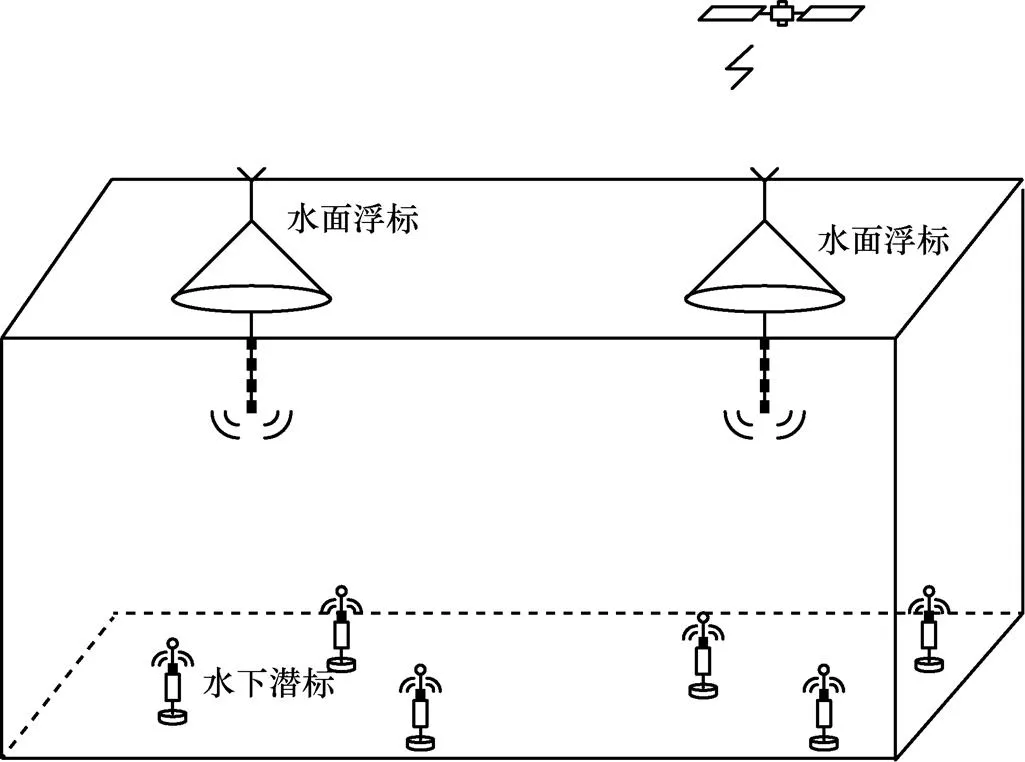
图1 潜标数据无线实时化传输系统工作示意
该系统水面和水下分系统具体结构如图2所示,潜标在水下500 m主浮体上安装两部多普勒流速剖面仪(ADCP)和一部水声通信机,3部设备通过水密电缆连接进行数据通信。ADCP能够获得海面以下1 000 m流速剖面数据,水声通信机通过水密电缆读取ADCP数据后,用水声通信和水面通信机建立数据连接然后进行数据传输,水声通信完成后,水面系统利用卫星通信模块通过卫星通信链路将数据传给陆地数据监控中心。
2.2 基于单载波的高速水声通信技术
水声通信是深海潜标观测数据无线实时传输系统的关键技术。声波在水介质中传播时能量会产生衰减,传播能量衰减主要受两个因素影响:扩散衰减、吸收衰减。扩散损失和吸收损失带来的总传播损失可用式(1)表示:

其中,l为传输距离,f为信号频率,lr为参考距离,k决定了声传播模型,它是一个1~2之间的数值,k=1时对应柱面波扩展,k=2时对应球面波扩展,a(f)是声吸收系数是频率的函数。从式(1)可以看出,扩散损失对所有频率都是一样的,吸收衰减产生的能量损失主要由海水介质本身的剪切粘滞性、体积粘滞性和离子驰豫等原因造成,声吸收系数a与频率f之间的关系较为复杂,它可由经验公式得到。在水声通信中,通常采用Thorp经验公式计算声吸收系数a(f),它主要适用于50 kHz以下频段,其具体形式为:

由式(2)可以看出,当频率较高时,式(2)中的前两项近似为常数,因此吸收衰减主要与声波频率的平方成正比,这使得声波的吸收衰减随着频率增大而快速增长。根据式(2)绘制的不同频率声波信号在传播不同距离时的吸收衰减如图3所示,图3中自下而上分别为传播1~10 km时,不同频率信号由于海水吸收产生的衰减。
由式(2)和图3可以看出,由于海水对声波的吸收衰减作用,在长距离声信号传播过程中,频率越高的信号能量衰减越大,这使得利用宽带信号进行长距离水声通信时,水声信道呈现一种低通特性,是典型的低通信道。海水的吸收衰减特性使得长距离水声通信带宽很窄,因此水声通信不是一个能量效率很高的通信方式。深海潜标通常采用自容式工作模式,只能携带有限的电池进行供电,在带宽和能量受限的条件下,需要尽可能采用频带利用率高的水声通信调制方式。目前比较成熟的长距离水声通信调制方式包括非相干通信、单载波相干通信、多载波正交频分复用(OFDM)通信、扩频通信等,其中单载波相干通信和OFDM通信可以最大限度利用通信带宽,提高能量利用效率。采用BPSK和QPSK符号映射的水声OFDM通信调制信号的峰均比相比单载波调制高4 dB左右[16-17],长距离通信时,OFDM调制方式对功率放大器的动态范围要求较高,基于以上几点,本系统设计时采用了单载波相干水声通信方式,信号通信频带为9~15 kHz,通信速率6 kbit/s,在1 000 m通信距离上可以获得1 200 bit/J的能量利用率。
在水声通信过程中,由于声信号在传播过程中在水面和水底反射,会产生多径效应,其结果会使通信信号产生符号间干扰,因此相干水声通信在解调时需要进行信道均衡以消除符号间干扰。判决反馈均衡器的优异性能已经在水声通信得到广泛验证[18],进而产生了利用迭代译码和均衡器相结合的Turbo均衡器,本系统在Turbo均衡器基础上设计了基于时域反转技术的的双向Turbo均衡器,其原理是利用Turbo码解码过程中,时域正向和时域反向误码不相关性,进行双向Turbo迭代均衡后,进行判决信息合并,产生时域分集效果。其调制过程中符号映射过程如图4所示。

图4 相干通信符号映射

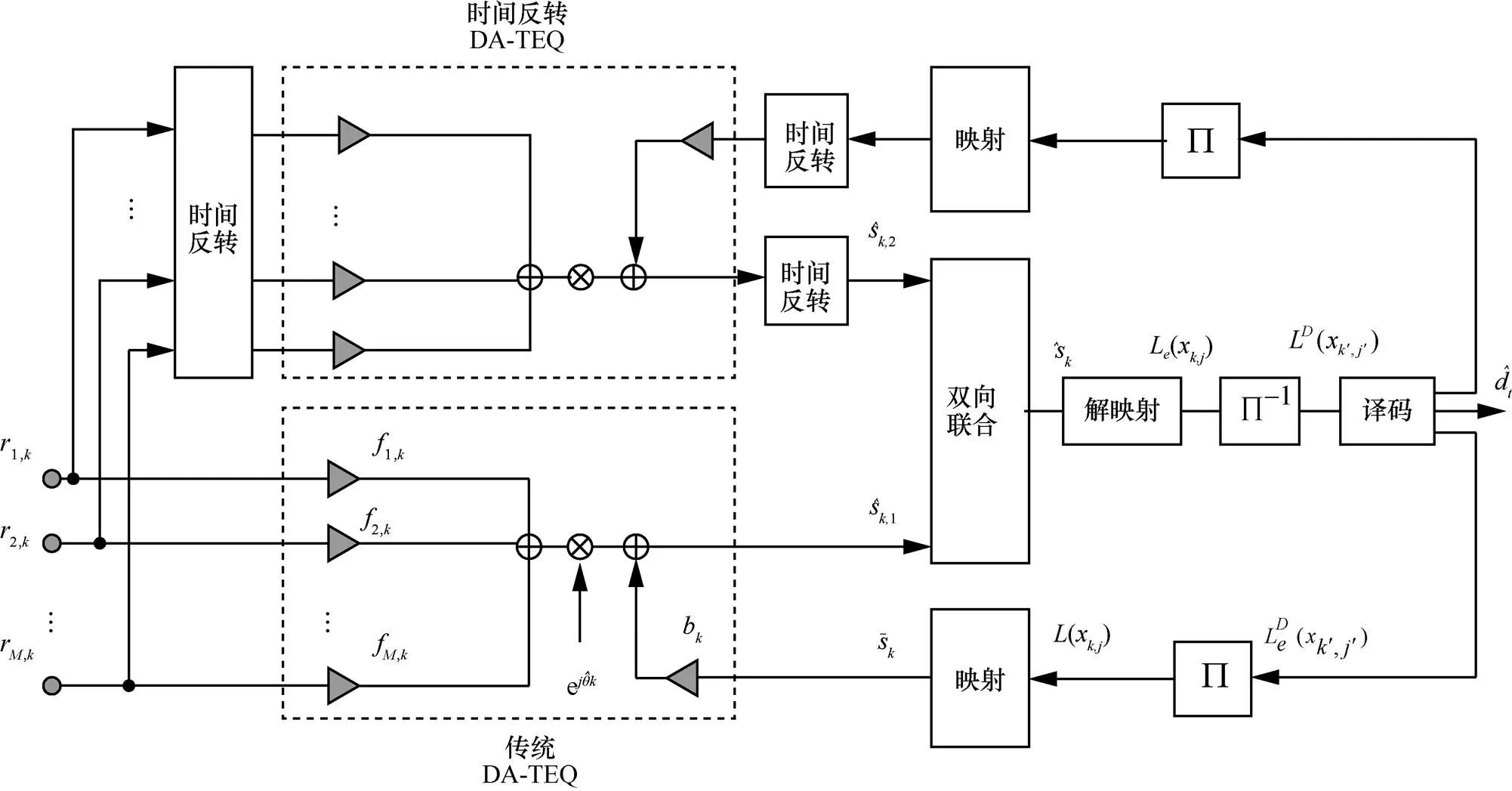
图5 直接自适应双向Turbo均衡器结构
3 应用效果
该系统设计完成后,在2016年的“西太主流系潜标观测网维护及升级”航次中得到成功应用,该航次是中国科学院战略性先导科技专项“热带西太平洋海洋系统物质能量交换及其影响”2016年科学考察任务之一,目的是完成一年一次的潜标回收、维护、数据读取、再次布放任务。在本航次中,该系统成功实现了一套赤道深海潜标1 000 m深流速数据长达8个月的无线实时传输,图6(a)和图6(b)是水面浮标、水下潜标布放过程示意,图6(c)是根据该系统实时回传的声学流速剖面数据绘制的流速剖面图。
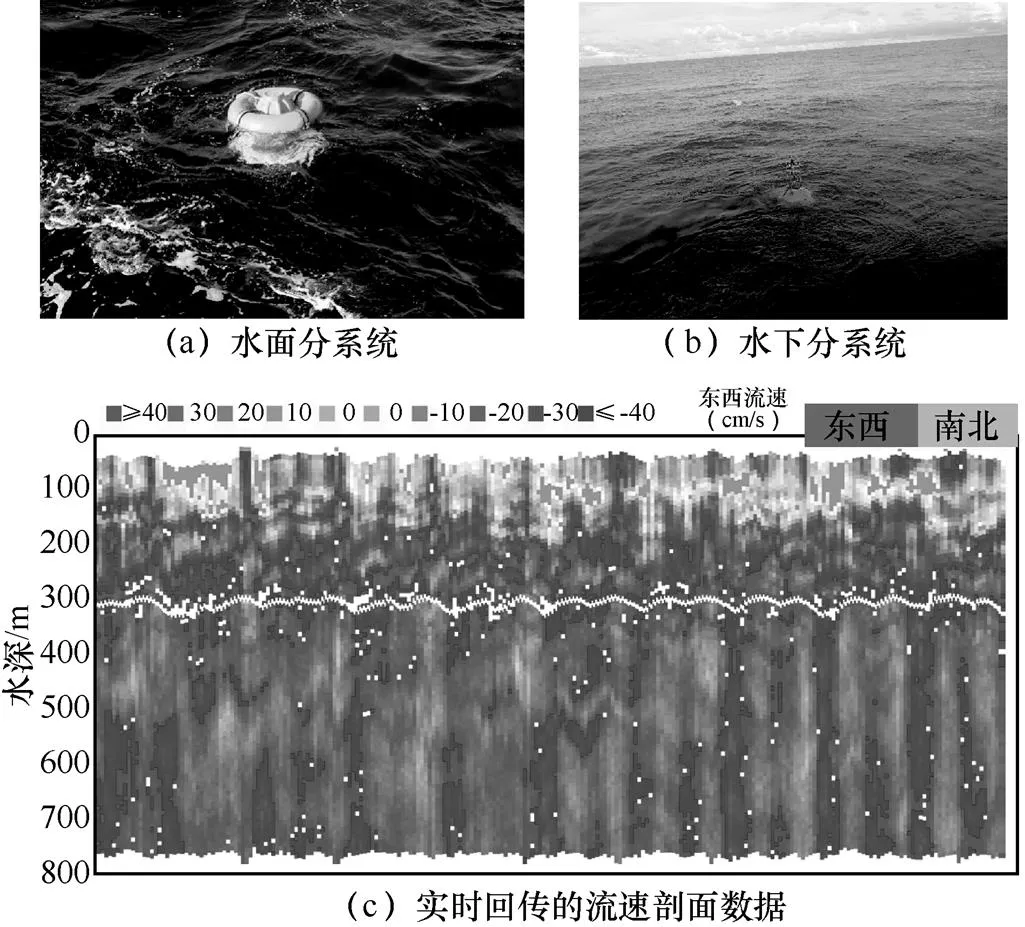
图6 海上应用效果
4 结束语
本文提出了一种潜标实时化数据传输系统构建方案,在水面和水下采用了不同的无线通信方式。实际应用表明,该系统非常适合深海大洋水下数据的远程获取。相比有缆通信,该系统布放方式简单、维护容易,对海洋上恶劣的气候条件的适应能力更强。目前来看,水声通信的通信速率和长距离有缆通信速率相当,虽然在能量利用效率上还有差距,但是在海洋应用过程中表现出更好的稳定性和可靠性。该系统原计划工作时间为365天,理论计算工作时间为577天,实际海上工作时间252天。实际工作时间未达要求的原因是水面系统值班电路电池电量耗尽,水面值班电路在海上实际应用前4个月已经工作,水下值班电路则是在布放当天工作,一年后设备维护时水下系统仍旧在正常工作。潜标无线实时化传输系统的研制成功,将彻底改变深海潜标数据获取模式,极大提高深海观测数据时效性,该系统工作可靠,易于布放维护,能够进行大规模推广应用,对于海洋天气预报、海洋气候灾害预防具有重要意义。
[1] 汪嘉宁, 王凡, 张林林. 西太平洋深海科学观测网的建设和运行[J]. 海洋与湖沼, 2017(6).
WANG J N, WANG F, ZHANG L L. Construction and operation of the western pacific deep-sea scientific observation network[J]. Oceanologia Et Limnologia Sinica, 2017(6).
[2] 王凡, 汪嘉宁. 我国热带西太平洋科学观测网初步建成[J]. 中国科学院院刊, 2016(2): 258-263.
WANG F, WANG J N. China’s tropical western Pacific scientific observation network was initially built[J]. Bulletin of Chinese Academy of Sciences, 2016(2): 258-263.
[3] WOOD J, IRISH J. A compliant surface mooring system for real-time data acquisition[C]//Oceans 1987, September 28-October 1, 1987, Halifax, NS, Canada. Piscataway: IEEE Press, 1987: 652-657.
[4] KIKUCHI T, INOUE J, LANGEVIN D. Argo-type profiling float observations under the arctic multiyear ice[J]. Deep Sea Research Part I: Oceanographic Research Papers, 2007, 54(9): 1675-1686.
[5] MATSUMOTO H.A vertical hydrophone array coupled via inductive modem for detecting deep-ocean seismic and volcanic sources[C]//Oceans 2010 MTS/IEEE Seattle, September 20-23, 2010, Seattle, WA, USA. Piscataway: IEEE Press, 2010: 1-7.
[6] CHAVE R A J, LEMON D D, BUERMANS J. Near real-time transmission of reduced data from a moored multi-frequency sonar by low bandwidth telemetry[C]//Oceans 2015-MTS/ IEEE Washington, October 19-22, 2015, Washington, DC, USA. Piscataway: IEEE Press, 2015: 1-5.
[7] FREITAG L E, MERRIAM J S, FRYE D E, et al. A long-term deep-water acoustic telemetry experiment[C]//Oceans 1991, October 1-3, 1991, Honolulu, Hawaii, USA. Piscataway: IEEE Press, 1991: 254-260.
[8] SCALLY D, RYERSON D, TOWLES T. Acoustic telemetry in an automated system for long-term ocean data in real time[C]//Oceans 1984, September 10-12, 1984, Washington, DC, USA.Piscataway: IEEE Press, 1984: 748-752.
[9] LIPPERA. Real-time desalination plant outfall monitoring using acoustic telemetry modems[C]//Oceans 2011, September 19-22, 2011, Waikoloa, HI, USA.Piscataway: IEEE Press, 2011:1-4.
[10] SHIH H H. Real-time current and wave measurements in ports and harbors using ADCP[C]//Oceans 2012, May 21-24, 2012, Yeosu, South Korea. Piscataway: IEEE Press, 2012: 1-8.
[11] CODIGA D L, RICE J A, BAXLEY P A. Networked acoustic modems for real-time data delivery from distributed subsurface instruments in the coastal ocean: initial system development and performance[J]. Journal of Atmospheric & Oceanic Technology, 1990, 21(2): 331-346.
[12] FREITAG L, BALL K, KOSKI P, et al. Acoustic communications for deep-ocean observatories: results of initial testing at the MBARI MARS node[C]//Oceans 2010, May 24-27, 2010, Sydney, Australia. Piscataway: IEEE Press, 2010: 1-6.
[13] DESTINY F, JONATHAN W, MATTHEW G.An acoustically-linked deep-ocean observatory[C]//Oceans Europe, June 20-23, 2005, Brest, France. Piscataway: IEEE Press, 2005: 969-974.
[14] 兰志刚. 平台基有缆潜标实时内波监测系统[J]. 海洋科学, 2012, 36(12): 76-80.
LAN Z G. Platform-based cable submersible real-time internal wave monitoring system[J]. Marine Sciences, 2012, 36(12): 76-80.
[15] 赵忠生, 袁志伟, 黄磊,等. 深海潜标ADCP的实时数据传输[J]. 海洋科学, 2012, 36(8): 94-97.
ZHAO Z S, YUAN Z W, HUANG L, et al. Deep sea submersible ADCP real-time data transmission[J]. Marine Sciences, 2012, 36(8): 94-97.
[16] BREKHOVSKIKH L M, LYSANOV Y P. Fundamentals of ocean acoustics[M]. New York: Springer, 2003.
[17] ZHOU S L, WANG Z H. OFDM for underwater acoustic communications[M]. Hoboken: Wiley, 2014
[18] STOJANOVIC M, CATIPOVIC J A, PROKIS J G. Phase-coherent digital communication for underwater acoustic channels[J]. IEEE Journal of Oceanic Engineering, 1994, 19(1): 100-111.
Design of a wireless real-time observation data transmission system for deep ocean mooring
XU Lijun1,2, HOU Zhaohuan1, YAN Shefeng1,2, ZHANG Zhen1, ZENG Di1
1. The Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China 2. University of Chinese Academy of Sciences, Beijing 100190, China
According to the requirement of the transmission of deep ocean mooring observation data, a wireless data transmission system was designed to help the ocean graphic scientists get the current data from the instruments of the ocean mooring in real-time mode. Because of the difference of the underwater acoustic channel and the terrestrial channel, communication technologies were applied, one was underwater acoustic communication, and the other was the communication by iridium satellites, the scientists could read the data at the land monitoring station. The results indicate that the system can fulfill the real-data acquisition from the deep ocean mooring, and the system shows the reliability under all kinds of weather conditions.
underwater acoustic communication, deep ocean mooring, real-time transmission
P715.2
A
10.11959/j.issn.1000−0801.2018194
徐立军(1977−),男,中国科学院声学研究所副研究员,中国科学院大学电子电气与通信工程学院副教授,主要研究方向为水声通信、水下信号处理。
侯朝焕(1936−),男,中国科学院院士,中国科学院声学研究所研究员、博士生导师,主要研究方向为声学、信息处理。
鄢社锋(1978−),男,中国科学院声学研究所研究员、博士生导师,水下航行器信息技术重点实验室主任,中国科学院大学电子电气与通信工程学院教授,主要研究方向为声学阵列信号处理、水声通信、信息处理。

张震(1989−),男,中国科学院声学研究所助理研究员,主要研究方向为水声通信。
曾迪(1990−),男,中国科学院声学研究所助理研究员,主要研究方向为水声通信。
2018−05−01;
2018−06−09
鄢社锋,sfyan@mail.ioa.ac.cn
国家自然科学基金资助项目(No.61531017,No.61431020)
The National Natural Science Foundation of China (No.61531017, No.61431020)
猜你喜欢
科教新报(2024年2期)2024-03-17 09:48:23
中国科学院院刊(2023年2期)2023-02-27 09:55:44
——李振声
干旱地区农业研究(2022年3期)2022-06-09 08:45:04
中山大学学报(自然科学版)(中英文)(2020年1期)2020-02-26 11:06:28
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
中国科学院院刊(2016年8期)2016-03-24 09:29:45
海洋科学(2014年12期)2014-12-15 03:35:04
声学技术(2014年2期)2014-06-21 06:59:04