
Cloud Pavilion Shanghai, China
2018-06-30 04:29:12中国上海
世界建筑导报 2018年3期
中国,上海
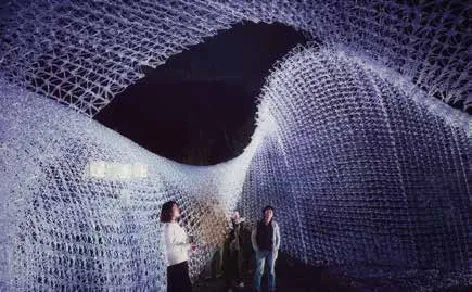
“云亭”位于上海市浦东新区临港新城港城广场(环湖西路88号),是由同济大学协同“创盟国际&一造科技”,首次运用改性塑料(Modified Plastic)实现的整体3D打印结构性能化展亭。
该项目旨在将建筑结构性能化设计技术与机器人建造结合,并用高度集成的方式完成并展示出来。“云亭”的设计,运用基于结构性能分析的拓扑优化算法,通过结构性能化技术生成建筑形式,然后将应力分布转变为网格系统,从而得到变密度的网格形式。同时,在设计的过程中充分考虑了如何实现网络单元的机器人空间打印。
整个网络原型单元系统包含疏密不同的五种单元路径,密集的单元主要用以承受自重荷载,稀疏的单元主要起到覆盖作用,使得看似复杂的网络系统在机器人空间打印技术的支持下拥有足够的可行性。基于数字设计与机器人建造技术的支持,“云亭”展现了结构性能化分析技术与建筑形式美学的充分融合。
由机器人空间打印工艺制作成的大型展品的建造重点主要在对抽象建筑造型实现结构合理的“物质化”建造,即通过特定的编程语言生成最有效的空间网格来实现连续建造,力求做到整体结构最轻、用材最省,大幅度提升了建造效率且节省了可观的材料开支。今年7月,同济大学完成14米跨度MP三维打印步行桥,使用层积式三维打印的技术方案。层积式三维打印方案在整体强度上有优势,但材料消耗量相对较大,自重较大的劣势也同时存在。因而此次 “云亭”的打印,是在进一步研究中实现了更加结构高效合节材的目标。
亭子的几何原型选定为长度11米、宽度11米、高度约6.0米的复杂曲面,由于该曲面部分区域的曲率过大且前端悬挑过长,传统的均质化空间打印法难以打印出这一形态,另外,如此大尺度的构件在设计阶段还会面临许多结构问题。本设计团队不满足于空间打印的这个现状,希望寻找一种新的机器人空间打印工艺,以实现建筑形态与结构性能完美融合的一体化设计。本设计对亭子的三维曲面进行结构拓扑优化,从而在设计初期使建筑结构性能得到了充分的考量。

“云亭”采用大尺度空间打印的方式进行建造,将形体抽象为空间网格,再进行网格打印建造。其在大尺度打印效率和结构性能集成方面具有独特的优势,是非常具有潜力的建筑三维打印技术方案。
综合考虑机器人作业空间尺寸及适宜的手工操作范围,亭子被划分为35块,每块的长度范围在5-7m,高度范围在1.5-2.5m,并由KUKA机器人进行空间打印加工而成。当遇到个别曲面曲率过大时,该块还会被细分为更小的尺寸以满足机器人空间打印的作业要求。
由于空间打印对挤出头的出料速度有严格控制,这使得空间打印速度都远远低于层积打印。本案加工时长为500小时,两套机器人装备耗时共计21天。机器人根据导入的编程语言从左至右进行打印,完成第一排水平方向的打印任务后,再垂直向上移动至下一排的起点坐标,随后依次从右至左完成第二排水平方向的打印任务,并按照此逻辑完成全部体块的打印任务。
所有的构件在工厂预制完成并进行编号、分割打磨,然后分批运送至现场准备安装。整个安装搭建过程耗时不到一天,从而实现了快捷、绿色、无污染的安装环境。主要的搭建过程包括如下步骤:
1)定位亭子的4个支座坐标,并进行预埋处理;
2)依靠场地中准备的脚手架与钢板,固定着地的4块构件;
3)以已固定的4块构件为出发点,依次开始拼装,并利用扎带固定相邻两块构件;4)完成所有构件拼装后,拆除现场脚手架
在未来,这种机器人空间打印技术将在建筑复杂空间结构、异形模板、形体快速找形等方面拥有广阔应用前景。下一步研发团队将在材料和工艺的深化和完善以及配套工艺的研发方面进行进一步的探索,将建筑大尺度空间打印技术推向更为可靠和广泛的产业应用。


“Cloud Pavillion”, a temporary structure made from modified extruded plastic, was recently unveiled as part of the “Sharing a Future Public Space” exhibition within the Shanghai Urban Space Art Season 2017 in Lingang New City. The joint exhibition attracted experts from around the world in the fields of architecture, culture and art. The mission of the exhibition is stated as “introducing public art into a spatial layout in order to build a wider and more open platform,activate the space in Lingang New City and enhance the quality and vitality of urban space.”
Cloud Pavilion aims to combine structural performance-based design techniques from architecture with robotic construction in a highly integrated manner. A structural performance based topological optimization algorithm is used in the Cloud Pavilion design to generate the architecture form. This form distributes stress into a grid system of variable density. The spatial requirements for robotically printing the design were incorporated into the design process.
The entire network contains five types of different densities. The dense zones are used for bearing the load of the structure while the zones of less density provide longer spans used for covering a greater area. Based on the support of digital design and robotic construction technology, the Cloud Pavilion demonstrates the full integration of structural performance analysis technology with aesthetic architectural form.
Due to the cooling rate of extruded thermal plastic, the speed of spatial printing is much slower than layer-by-layer printing. In total the project took 500 hours of printing, 21 days with two robots working at the same time.

猜你喜欢
中学生数理化·七年级数学人教版(2022年10期)2022-11-11 03:18:56
数学年刊A辑(中文版)(2019年3期)2019-10-08 07:34:40
北京航空航天大学学报(2017年6期)2017-11-23 05:57:36
国际木业(2016年8期)2017-01-15 13:55:22
国际木业(2016年12期)2016-12-21 03:13:28
国际木业(2016年3期)2016-12-01 05:04:52
国际木业(2016年1期)2016-12-01 05:04:09
浙江大学学报(工学版)(2016年10期)2016-06-05 09:20:56
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
