商业卫星测运控一体化无人值守地面管理系统
2018-06-29 06:20:34高梦淇1袁健华1周英庆1沈朱泉1徐书尹1郑永艾1上海卫星工程研究所
卫星与网络 2018年5期
+ 高梦淇1,袁健华1,周英庆1,沈朱泉1,徐书尹1,郑永艾1 (1. 上海卫星工程研究所)
近年来,随着电子技术的不断进步,卫星技术也得到了飞速发展,成本低、研制周期短、价格低的商业卫星日益受到人们青睐[1],商业小卫星的兴起将开启卫星大数据的时代[2]。在发展商业航天的大环境具备之后,成本过高自然就成了制约商业航天发展的突出问题[3]。减少商业卫星投入成本不仅包括减少卫星的研制成本,还包括减少商业卫星在轨运行管理的成本。针对商业卫星独特的运营模式,提高商业卫星在轨运行管理效率,减少卫星在轨管理成本,本文提出了一种将商业卫星测控、数传星地链路一体化的地面管理系统,仅运用一套地面设备就可实现多颗低轨商业卫星的测控和运控管理工作,并实时完成卫星测控、数传数据解析处理。系统拥有多种控制模式,整个过程可实现无人值守自动化管理。
1 系统组成及功能
无人值守测运控一体化地面管理系统可由数据收发分系统、系统运行管理分系统和数据处理分系统组成。
“上行信号”经运控站进行调制、上变频和功放等处理后,经天线发送至卫星;并通过天线接收卫星发送的“数传、遥测”等下行信号,至运控站进行低噪声放大、下变频和解调等处理,并对卫星数据进行显示和处理,同时可通过网络对整个运控系统进行远程监控。
(1) 数据收发分系统主要完成卫星测控信号和数传信号的收发、信号处理和信号调制解调等功能,主要包括数据收发天线、信道处理子系统和基带等设备。
(2) 系统运行管理分系统主要完成全部系统的设备监控、任务计划生成、远程控制和卫星的日常管理等工作,由系统监控机和远程监控机组成。
(3) 数据处理分系统主要进行卫星下行遥测数据和业务数据的处理工作,能够完成卫星数据的实时处理和分发工作。
测、运控一体化无人值守地面管理系统组成如图1所示。

图1 地面管理系统组成图
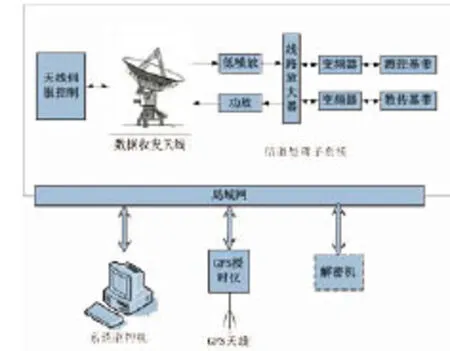
图2 数据收发分系统组成示意图

图3 系统运行分系统示意图
1.1 数据收发分系统
数据收发分系统主要完成对卫星零级数据的预处理工作,分系统组成如图2所示。其中数据收发天线完成对卫星下行信号的接收和上行信号的发射,具有单脉冲自动跟踪[4]功能和程序跟踪[5]功能;天线伺服主要实现对天线的驱动控制[6];信道子系统主要包括低噪放、功放、线路放大器、测控链路变频器、数传链路变频器、测控基带和数传基带等设备,主要实现对卫星信号的处理、变频和调制解调等功能。
1.2 系统运行管理分系统
系统运行管理分系统通过系统监控机和远控计算机实现系统各设备的控制管理、计划生成、任务下发、监视工作状态、故障报警、显示和存储各类数据。
系统监控软件部署在系统监控机上,用以完成系统监控端所有的服务功能和操控功能,执行工作计划时设备的调度、流程的安排;远程监控软件[6]部署在远程监控机上,提供用户监控设备、执行计划任务功能,提供用户遥控指令发送功能,完成用户与接收站系统的交互;系统可实现本地分机控制和远程监控两种方式的控制,并通过数据网传输遥测数据。
用户一般在远程监控机上操控单收站系统,远程监控机软件用以完成系统中所有设备的状态监视和参数控制。同时支持用户制定计划任务,在设定时间自动完成卫星跟踪任务。
与系统监控机不一致的是远程监控机不是直接与设备交互,而是通过系统监控机完成监控功能。而且,系统监控机上卫星任务操作流程固定后,远程监控机直接使用这些任务操作流程制定工作计划。
系统运行管理分系统示意图如图3所示。
1.3 数据处理分系统
数据处理分系统分为卫星测控数据处理终端和业务数据处理终端。
测控数据处理终端完成上行遥控指令、注入数据及计划任务的生成,进行下行遥测数据处理监测、分类、分析和小卫星的日常管理等功能。

图4 系统工作流程图
业务数据处理终端根据不同的业务内容、业务数据格式和用户应用需求,对卫星数传数据进行分类、提取、分析、处理和综合展示。
数据处理分系统主要完成以下功能:
(1)测控计划任务生成
(2)遥测监测、报警
(3)卫星安全状态综合3D显示
(4)卫星特殊事件预报
(5)卫星轨道和姿态管理
(6)卫星数传数据分类、提取
(7)卫星业务应用数据处理
(8)卫星业务应用数据综合2D/3D显示
(9)用户管理
2 系统工作流程
测、运控一体化无人值守地面管理系统的工作流程共分为四个阶段,分别为任务前准备阶段,卫星跟踪与捕获阶段,数据解调输出与处理阶段和任务结束恢复阶段。
具体工作流程图如图4所示。
2.1 任务前准备阶段
系统定期标校和测试,保证任务前系统处于完好状态,指标满足任务要求。
在任务之前需要获得卫星的轨道根数等注入数据。
任务前各设备加电自检,由系统监控机根据设置的任务宏命令将各设备工作参数分发到各分系统单机,并根据设备工作状态数据库选择适合的信号通道配置,根据任务设置选择和差通道的极化方式。
伺服系统根据卫星轨道数据判断卫星过顶方向,然后驱动天线座,使得天线指向等待位置。
2.2 卫星跟踪与捕获
在卫星出现的预定时间控制天线进入搜索模式[7]。当卫星进入天线捕获范围内,天线接收到的和差通道射频信号通过极化选择开关选择极化方式[8],经过LNA放大后经单通道变换器合成一路信号通过电缆传输到设备机房中,信号在机房内经分路器分成两路,分别经过测控下变频器和数传下变频器变频到70MHz中频。
2.3 数据解调输出与处理
接收到信号后,基带终端完成遥测、数传信号的捕获和解调。系统监控机根据两套遥测基带设备上报的工作状态,选择其中一路数据作为数据输出源,数据输出到系统的局域网中。若需解密处理,则解密机从局域网中获取数据,解密之后再将数据发送到局域网。系统监控机存储源码数据,并根据要求通过远控计算机向遥测显示终端和业务数据处理终端发送遥测和业务应用数据。
2.4 任务结束
任务结束时间到、或卫星飞出覆盖区域、或系统监控机发出结束指令,则本次任务结束,天线复位,系统监控机生成本次任务的报表。
3 系统控制方式
本系统为三级控制方式,分别是:本控、分控、远控,其定义分别为:
本控:单机通过自带面板和界面对本身工作参数进行设置,此控制方式优先级最高。具有本控功能的单机有:天线控制单元(ACU)、下变频器、基准源与开关矩阵(含极化控制与LNA选择)、遥测基带终端、数传基带终端、遥测模拟源、校验上变频器等设备。
分控:系统监控机通过网络和串口监视各分机的工作状态,对各分机工作参数和工作状态进行设置,此控制方式优先级其次。具有本控功能的单机都可通过系统监控机控制,但ACU除外(只监视不控制)。
远控:远控计算机通过局域网与系统监控机交互信息,通过系统监控机监视各分机的工作状态,对各分机工作参数和工作状态进行设置,此控制方式优先级最低。具有本控功能的单机都可进行远控,但ACU除外(只监视不控制)。另外,远控计算机可在屏幕上观看系统配置的示波器的测量波形。
系统监控机负责切换系统主备状态。
根据基带的故障指示、下变频器的故障指示、LNA的电流超限(高限/低限)指示,立即将故障设备离线。
主备通道信噪比相差较大时,使信噪比低的通道处于备份状态,并通过开关矩阵分配处于主通道的下变频器同时输出给2个基带设备,若基带设备显示的信噪比仍低,表明备份的基带设备及外围部件(电缆等)有问题;若基带设备恢复正常,表明备份的下变频器及外围部件(电缆等)有问题;系统监控机给出故障指示。
在天线跟踪正常且在正常覆盖区域内,主备通道数据都同时丢失时,若系统设置LNA切换为自动,则系统监控机控制LNA切换开关动作,控制LNA主备切换[9]。为保证系统稳定,该动作规定最小间隔时间为10秒。
4 结束语
本文简要介绍了商业卫星测运控一体化地面管理系统的功能组成、工作流程和系统控制方式。实现了商业卫星的测控、数传数据从零级数据接收到后续数据的处理、分发,且系统前端无需人为干预,用户可通过远程监控系统全部工作状态。在大幅度提升了商业卫星在轨测控、运控管理效率的同时,减少了商业卫星在轨运行管理的成本。
[1]雷永刚,张国亭.面向未来的微纳卫星测控管理[J].飞行器测控学报,2017,36(3):164-172.Lei Yong gang, Zhang Guoting. Micre-nano-satellite control for the future[J].Journal of Spacecraft TT&C Technology,2017,36(3):164-172.
[2]刘璇,张振华.商业卫星——让“战场”连通“市场”[C].//航天电子军民融合论坛暨第十四届学术交流会优秀文论集.北京:中国航天科技集团公司第九研究院科学技术委员会,2017:85-91.
[3]软件定义卫星项目组.软件定义卫星——商业航天发展的助推器 [J].卫星与网络,2017,09:36-38.
[4]韩冬. 卫星地面站6米天线跟踪系统的研究[D]. 石家庄:河北科技大学,2015:23.HAN Dong. Research on the Tracking System of 6 mAntenna of Satellite Earth Station [D]. Wuhan:Hebei University of Science and Technology,2015:23.(in Chinese).
[5]REYER J A,FATHY H K,PAPALAMBROS P Y.Comparison of combined embodiment design of control optimization strategies using optimality conditions.ASME Design Engineering Technical Conferences&Computers and Information in Engineering Conference,2001,9.
[6]张涛,李一超,昂正全.卫星地面站测控设备远程移动监测系统的设计与实现[C].//Proceedings of 2012International Conference on Earth Science and Remote Sensing(ESRS 2012).HongKong,China:Information Engineering Research institutem,USA,2012:586-591.
[7]李晓娟,戴谊.一种卫星地面站伺服跟踪测控软件的实现[J].信息与电子工程,2011:9(2):244-247
[8]马瑞峰,郭陈江.基于遥感卫星地面站伺服控制系统的研究[J].计算机测量与控制,2005,13(7):688-690.
[9]王文芳,付东洋.卫星地面站接收与处理系统关键流程分析[J] .信息技术,2011,09:34-38.WANG Wen fang,FU Dong yang.Key workflow analysis of receiving and processing system of satellite ground station[J] .Information technoligy,2011,09:34-38.
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23 09:02:16
载人航天(2019年1期)2019-03-07 01:41:02
电子测试(2018年22期)2018-12-19 05:12:58
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
电子器件(2015年5期)2015-12-29 08:43:30
数字通信世界(2015年5期)2015-04-04 13:28:15
集美大学学报(自然科学版)(2015年4期)2015-02-28 01:13:39
电子设计工程(2015年3期)2015-02-27 12:03:58
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:41