
电动汽车转速估计器设计
2018-06-21 02:51秦峻龙刘梁鸿钟红波
电气技术 2018年6期
秦峻龙 蒋 林 刘梁鸿 袁 满 钟红波
电动汽车转速估计器设计
秦峻龙 蒋 林 刘梁鸿 袁 满 钟红波
(西南石油大学电气信息学院,成都 610500)
针对现有电动汽车转速测量系统故障率高的问题,本文提出了一种基于无速度传感器原理的新型测速系统。该测速系统的主拓扑采用直-交结构,通过检测系统电流与电压的瞬时值,采用矢量控制方式,使永磁同步电动机模型等效为直流电动机,根据反馈的电流、电压信号利用DSP在软件上产生触发脉冲,驱动SVPWM模块控制电动机。基于TI公司的TMS320F28055控制芯片,搭建了转速估计系统的控制平台。仿真结果表明,转速估计器能够实现估计转速对实际转速的准确跟踪,理论上满足了设计指标。在开环条件下,实物也得到了验证。
永磁同步电动机;矢量控制;DSP;全阶磁链观测器;无速度传感器
近年来,随着新能源政策陆续出台,电动汽车的发展势头强劲[1]。汽车使用过程中,转速测量是必不可少的一部分。其能够将转速信号传送到仪表盘,供驾驶员参考,有效提高汽车的行驶性能。而速度传感器准确的测速,就成了速度测量系统的重要问题[2]。目前国内的速度传感器基本上采用的是增量式编码器测速,而由于安装技术复杂,速度传感器与电动机轴很难达到完全同心,因此降低了测量精度,同时增加了故障率,影响汽车行驶性能。校正过程会导致更多粉尘进入电动机,并且频繁的校正也会给电动机造成不可修复的损伤。而无速度传感器作为一种非接触式的测速方式,运用在汽车测速中,它无需直接测量转速,只采集电动机运行时的电流和电压信号,不存在同心度问题。无需增加设备,便于维护,这大大提高了汽车测速的可靠性与经济性[3]。
目前转速估计方法有[4-6]直接计算法、模型参考自适应法、滑膜观测器法和全阶状态观测器法等。直接计算法直接根据同步角速度与转差角速度作差得到转子电气角速度,但是不存在任何误差校正环节,严重依赖电动机参数;模型参考自适应法利用参考模型与可调模型输出量的误差构成相应的辨识机构来辨识电动机转速,但是转速的辨识精度不高,对参数依赖性大;滑膜观测器法采用估计电流偏差来确定滑模控制机构,并使控制系统的状态最终稳定在滑模超平面上,但是存在严重的抖振现象;全阶状态观测器法引入了电流的误差反馈量,形成了闭环观测,辨识精度较高,且通过观测器反馈增益矩阵合理配置观测器极点,可使观测器收敛速度较快,动态性能较好。而本文所采用的方法为全阶状态观测器法来辨识电动机的转速,通过配置合适的反馈增益矩阵,使系统具有辨识精度高,鲁棒性强,动态性能好等优点;与传统电动汽车转速辨识相比较,通过全阶观测器法来辨识电动汽车的转速,使转速的辨识精度得到了提高,电动汽车稳定运行得到了充分保证。
1 永磁同步电动机数学模型
为了简化分析,在建立永磁同步电动机数学模型时,一般作以下假设:假设转子永磁磁场在气隙空间分布为正弦波;忽略定子铁心饱和;不计铁心的涡流与磁滞损耗;转子上无绕组电阻。在dq坐标下,永磁同步电动机数学模型为
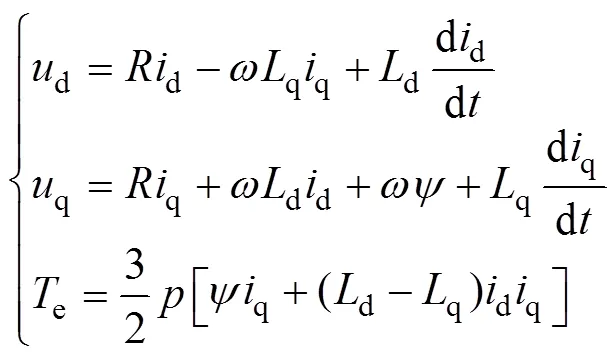
式中,d、d分别为d轴上的电压和电流分量;q、q分别为q轴上的电压和电流分量;d、q分别为直、交轴电感;为电动机的定子绕组电阻;为电动机的电角速度;为永磁体与定子交链磁链;e为永磁同步电动机的转矩;为电动机极对数。
2 全阶磁链观测器(AFO)
该转速估计系统是把永磁同步电动机本身作为参考模型,构造的全阶磁链观测器作为可调模型,如图1所示。
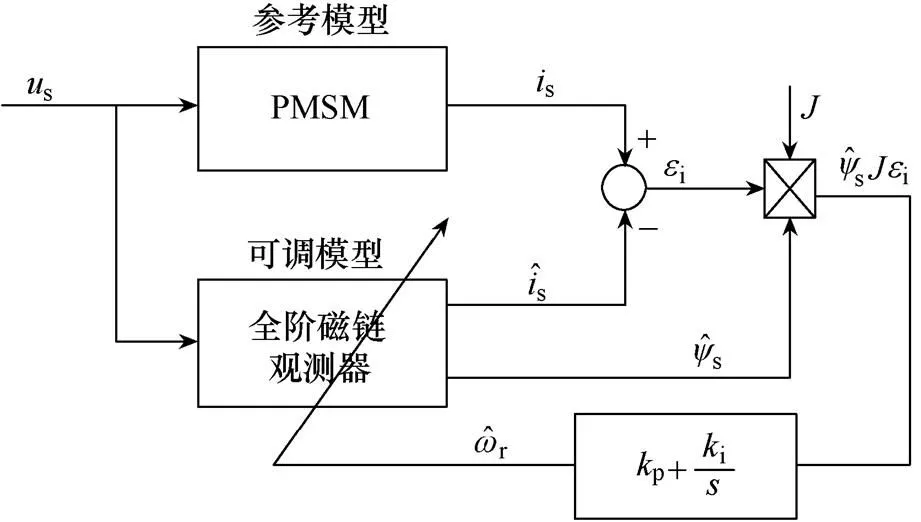
图1 基于AFO的转速估计系统
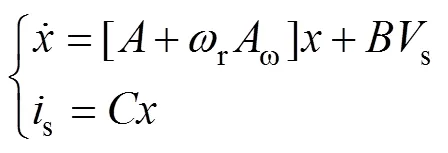
2.1 AFO的数学模型
永磁同步电动机可由以下的状态方程来描述:

2.2 稳定性分析
1)转速自适应律
定义李雅普洛夫函数如下:
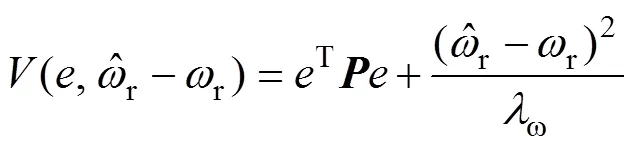
对式(3)求一阶导,得



自适应率由下式给出:

转速的自适应辨识算法为
2)反馈增益矩阵

满足此条件的增益矩阵不止一组,但通常取其中一组较为简单的解[7],即
此处取1.5。
3 仿真结果及实物验证
永磁同步电动机的无速度传感器矢量控制系统如图3所示[8],主要包括单相整流、三相逆变、信号检测、隔离驱动、控制回路、感应电动机等几个部分。其中控制回路包括全阶磁链观测器、PI调节器、坐标变换、转矩计算、SVPWM等模块,采用TI公司主频为60MHz的DSP28055控制芯片实现。系统开关设定为20kHz,即采用周期为50ms。中断服务程序频率10kHz。永磁同步电动机的参数为额定功率N=0.6kW,额定电压N=220V,额定电流N=4A,频率N=50Hz,额定转速N=3000r/min,定子电阻s=0.985W,定子电感直轴分量d=2.96mH,定子电感交轴分量q=2.96mH,极对数p=1。控制回路的主程序流程图如图2所示。
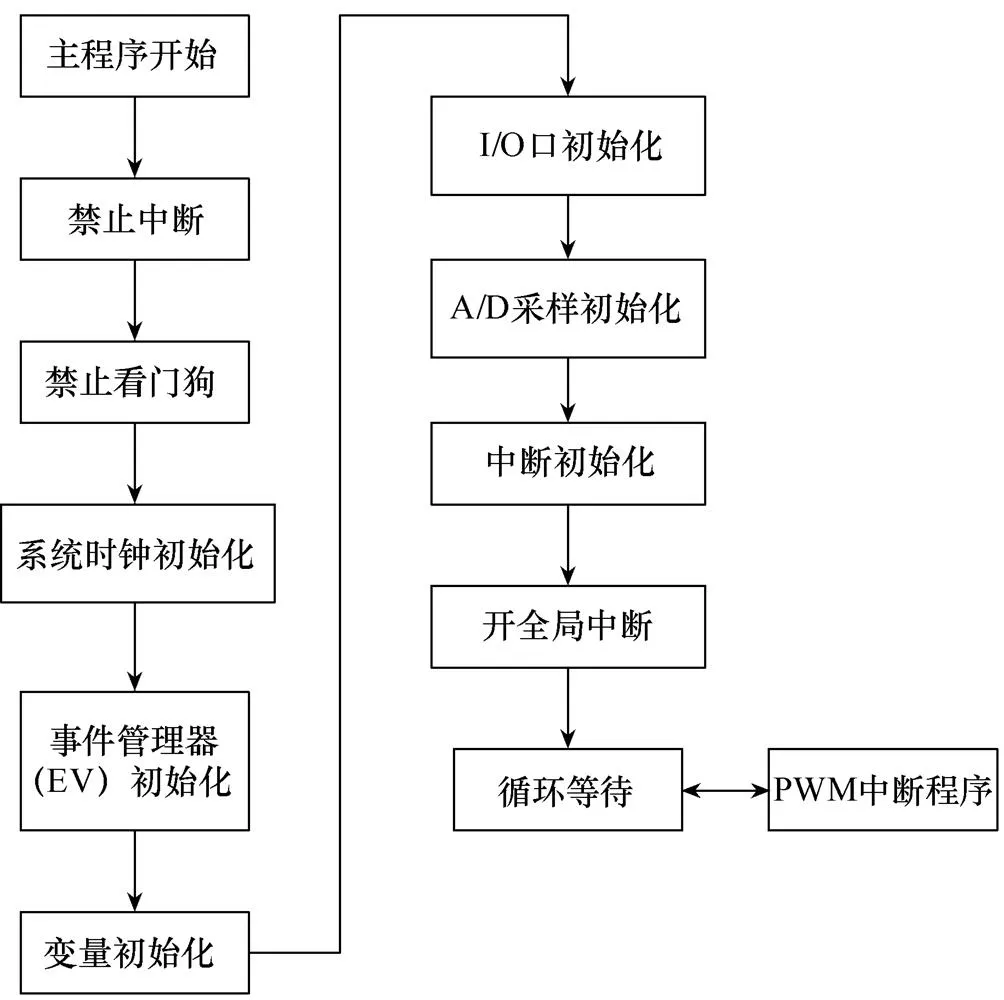
图2 主程序流程图
3.1 基于Simulink的永磁同步电动机转速估计仿真
1)电动机在高速状况下四象限的工作波形分析分别如图3至图7所示。
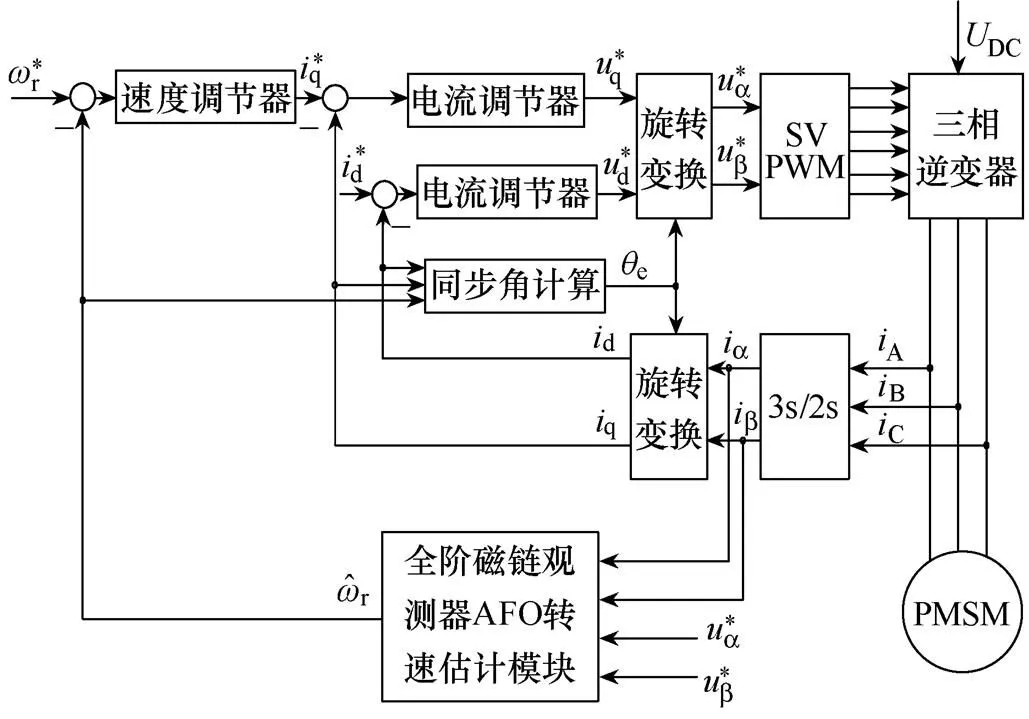
图3 无速度传感器(AFO)矢量控制系统
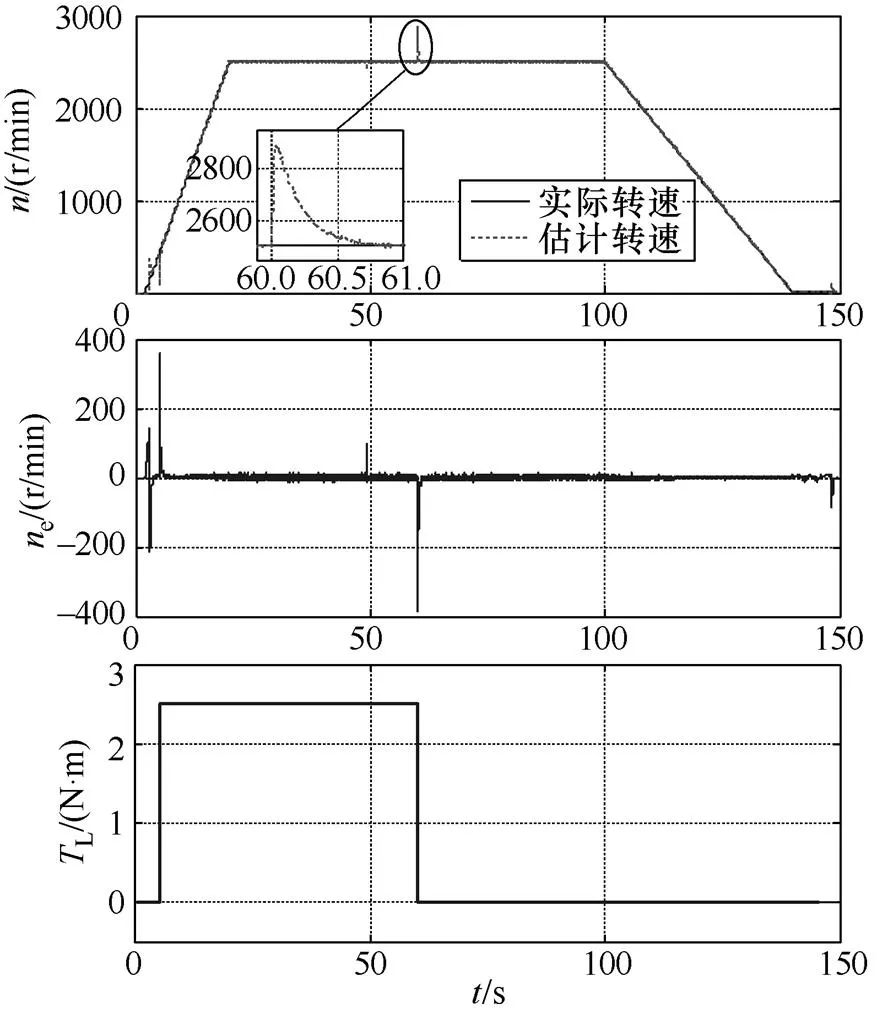
图4 电动机一象限运行的动态响应
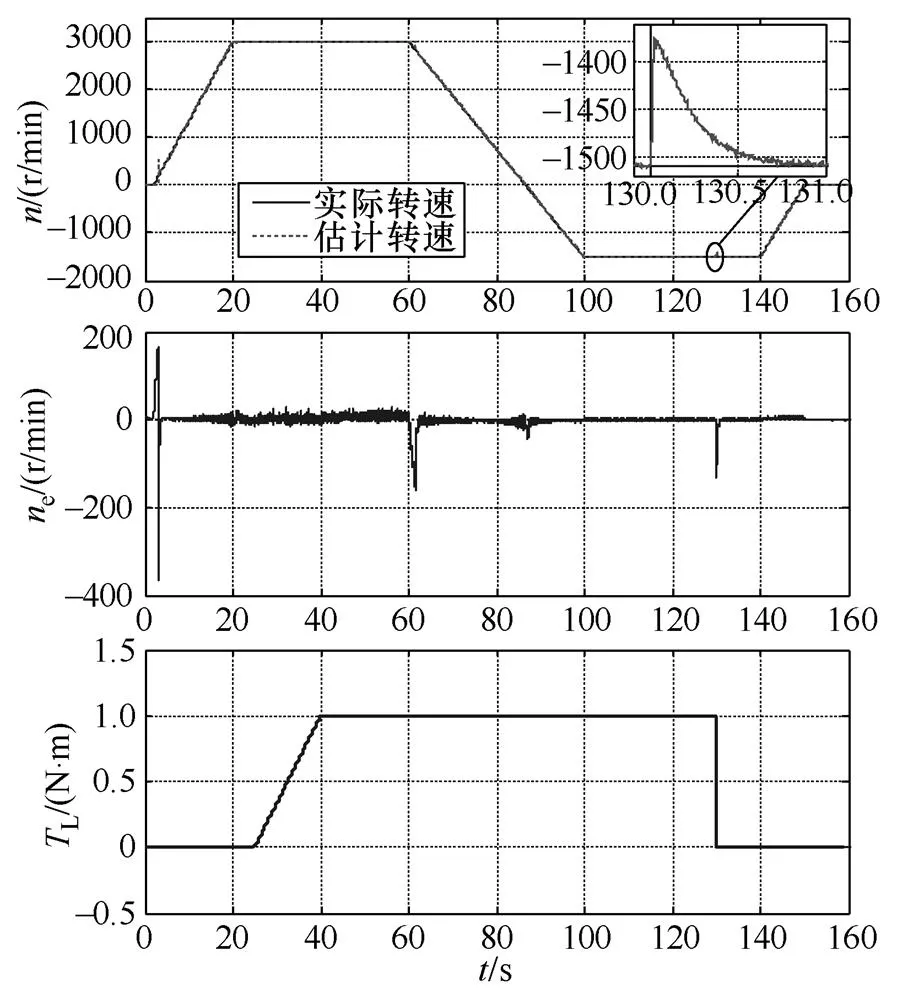
图5 电动机一、二象限切换运行的动态响应
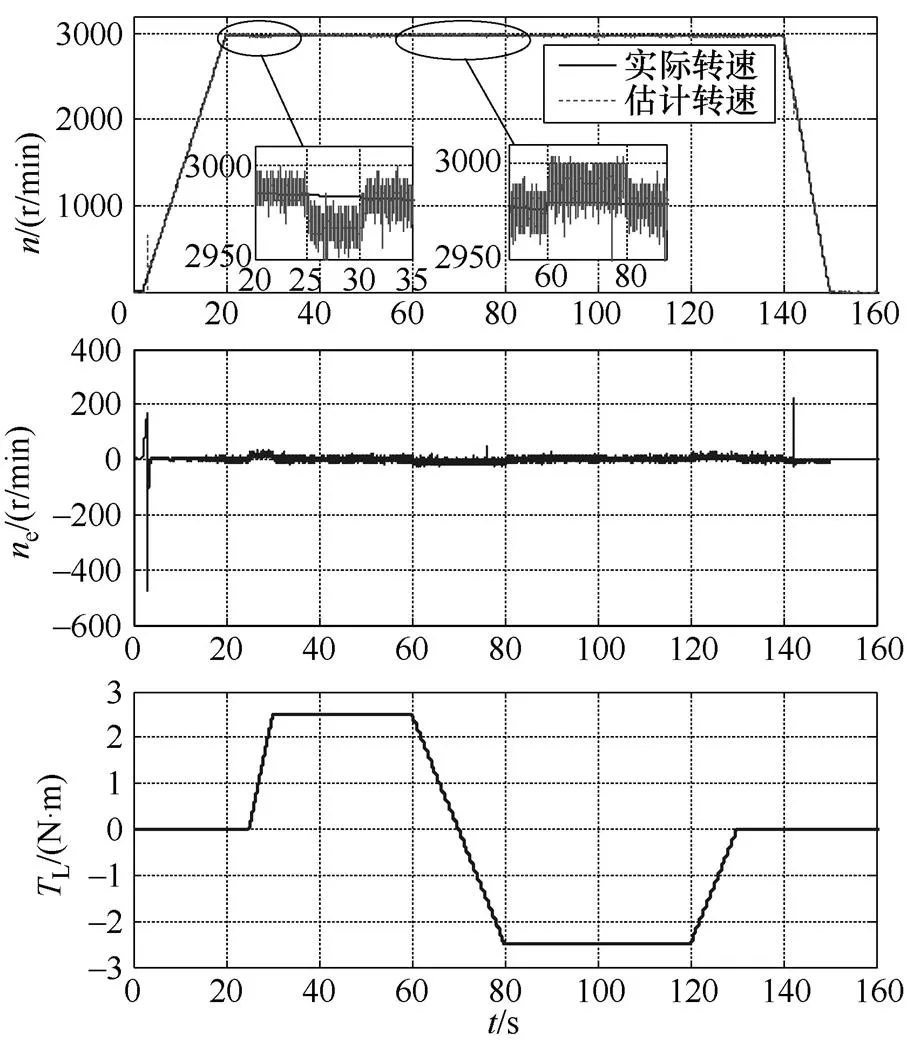
图6 电动机一、四象限切换运行的动态响应
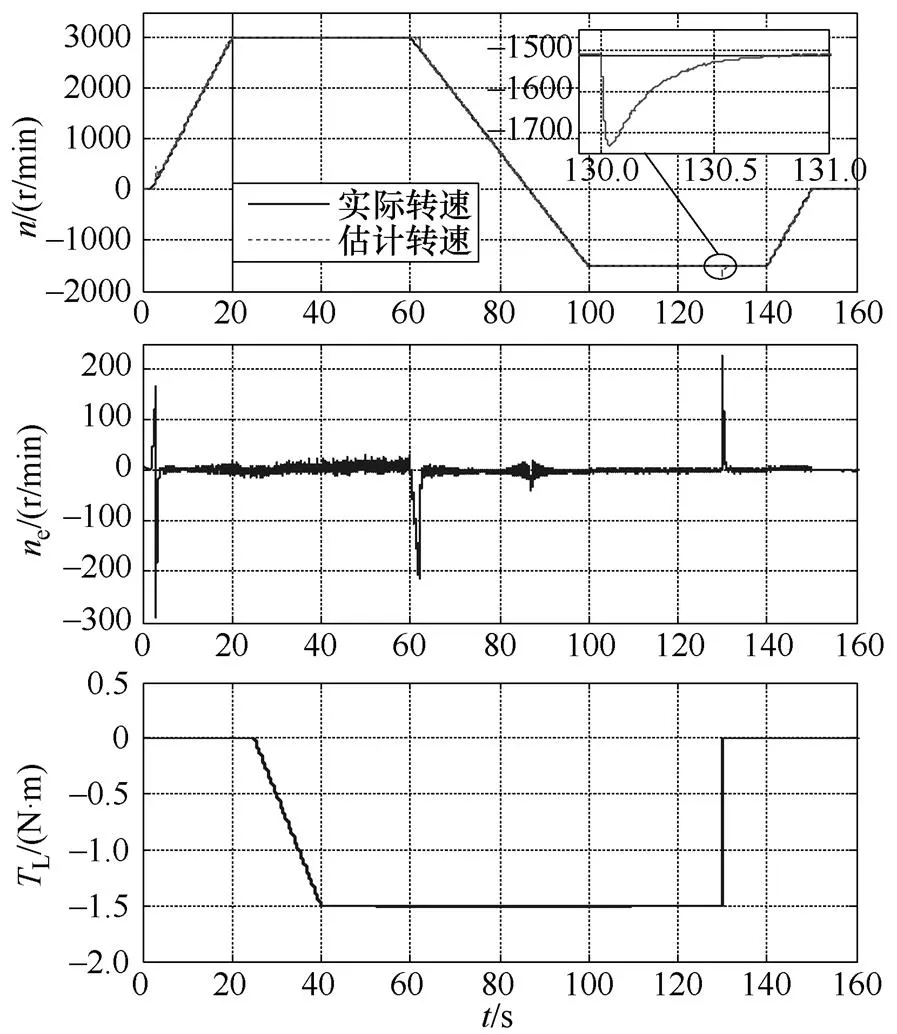
图7 电动机二、三象限切换运行的动态响应
2)电动机在低速状态下运行时的A相电流波形和转速波形分别如图8、图9所示。
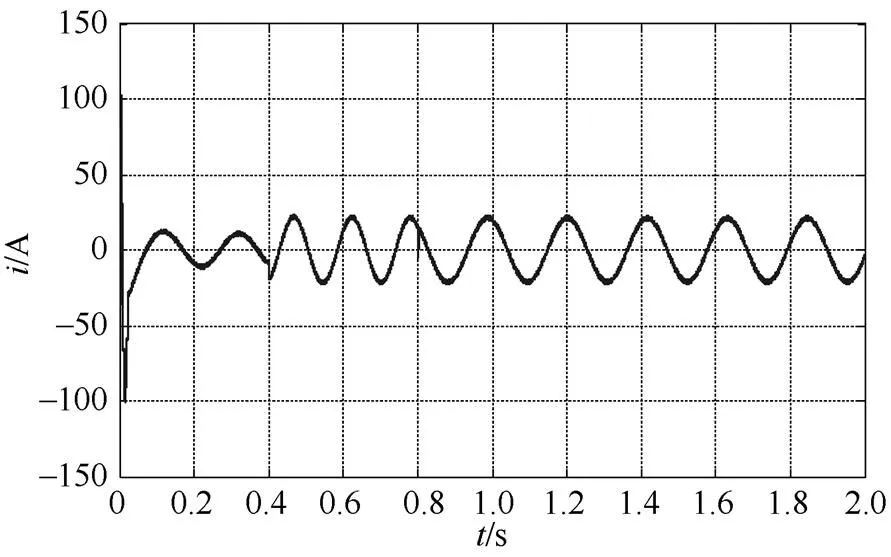
图8 低速段运行时A相电流波形
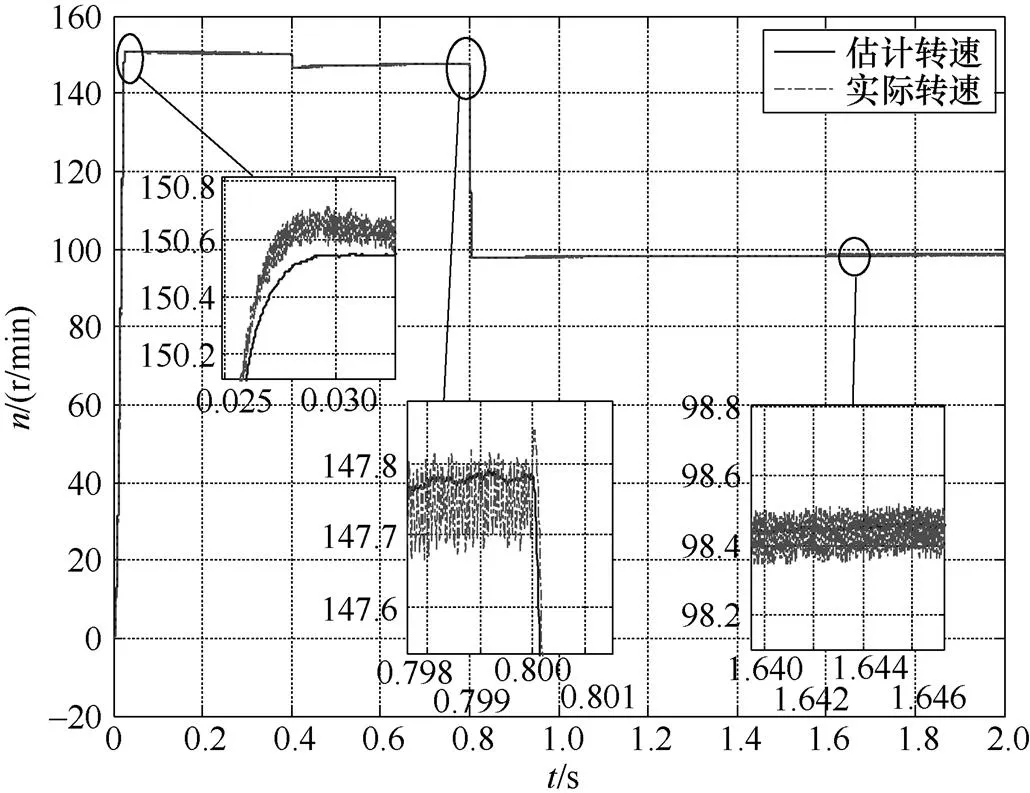
图9 低速段运行时转速波形
仿真结果表明,转速估计器能够在四个象限内都能对电动机转速进行准确估计[9-10]。且在转速或转矩突变时,估计误差较小。转速估计误差在2%以内,满足永磁同步电动机负载运行转速的变化要求。电动机的实际转速与全阶磁链观测器(AFO)的估计转速在电动机起动、加载、加速、减速和各个稳态过程中,响应速度快,估计转速都能够较精确地跟踪实际转速,验证了AFO自适应系统对转速估计的适用性[10]。当电动机运行在低速段时,0.03s时,A相电流即恢复稳定接近正弦波,转速超调量较小。0.8s时,转速由150r/min下降为100r/min,电磁转矩能够快速恢复,A相电流波形保持稳定。由以上分析,满足设计的要求。
3.2 实物验证
基于图3所示的系统框图搭建硬件实验平台,得到实验结果如图所示。图10至图12为本实验的逆变模块的触发脉冲波形。图13为经系统矢量控制技术后,所产生的两相静止坐标系下的波形。图14为正、反转时实际转速与估计转速波形。图15为突加负载时的转速波形(横轴5s/格,纵轴500r/min)。
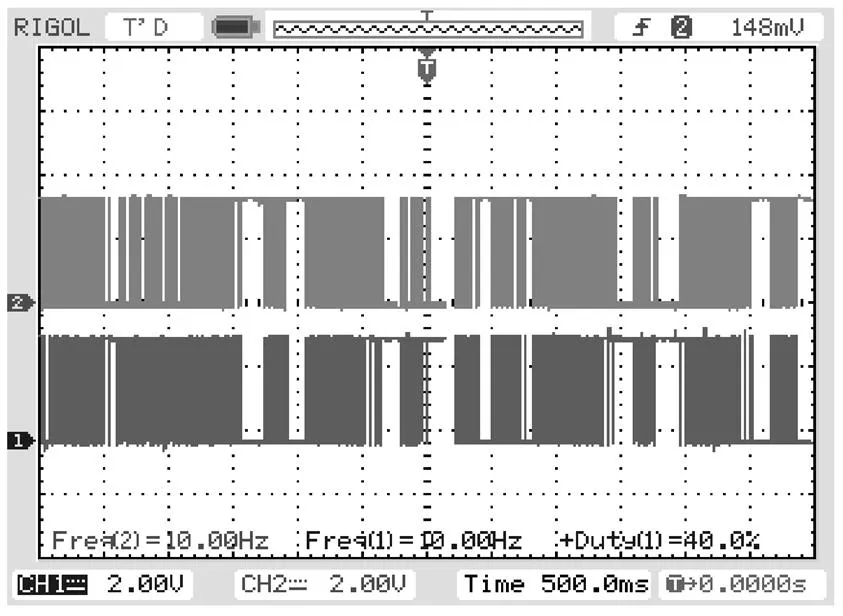
图10 触发脉冲波形1
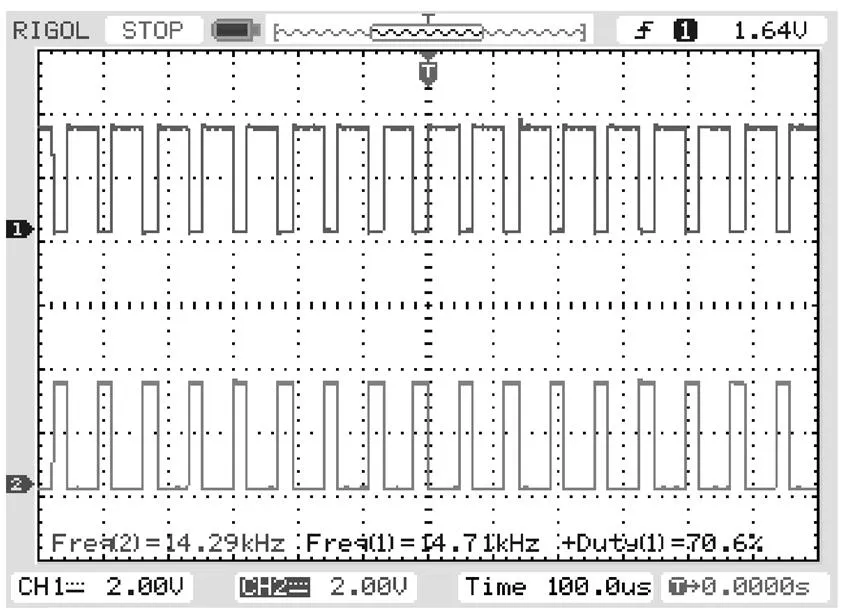
图11 触发脉冲波形2
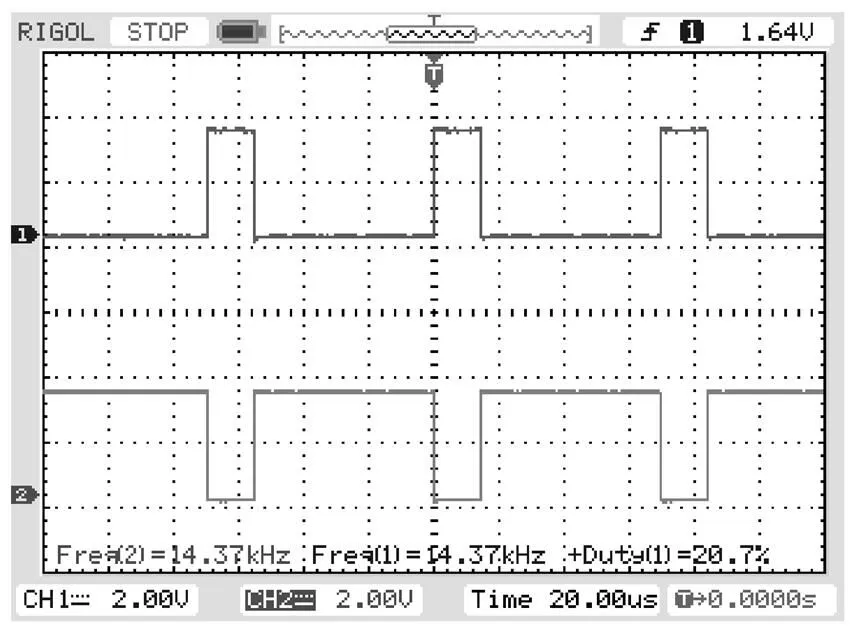
图12 触发脉冲波形3
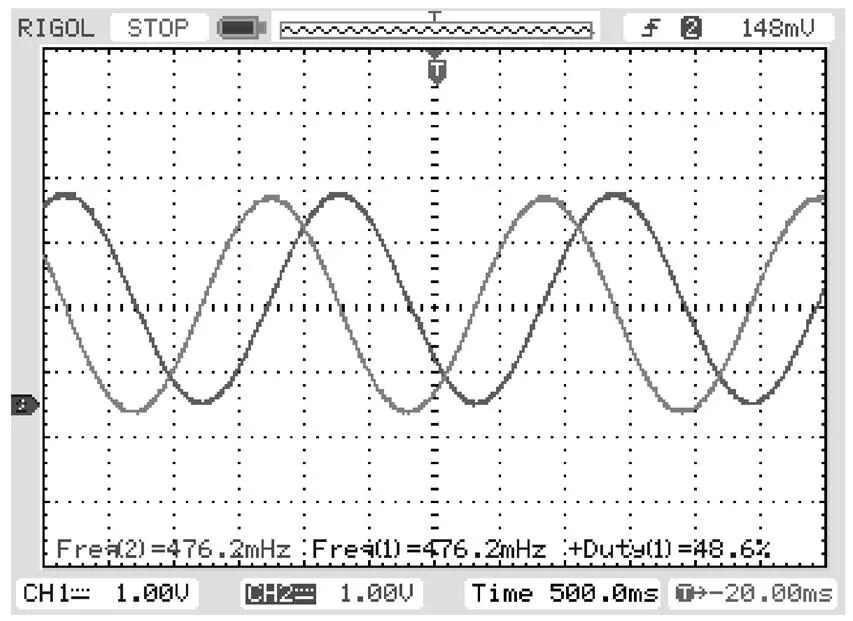
图13 两相静止坐标系下的电压波形
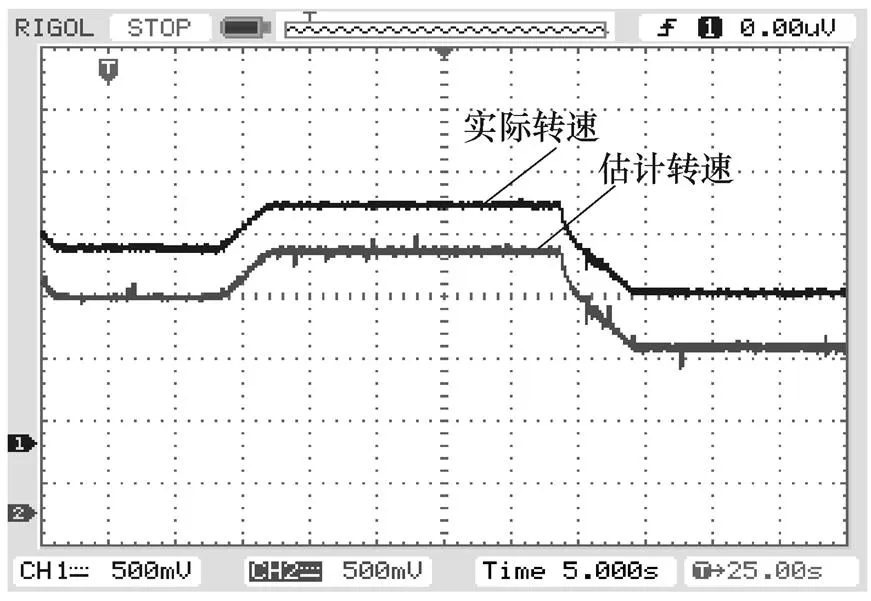
图14 实际转速与估计转速正反转波形
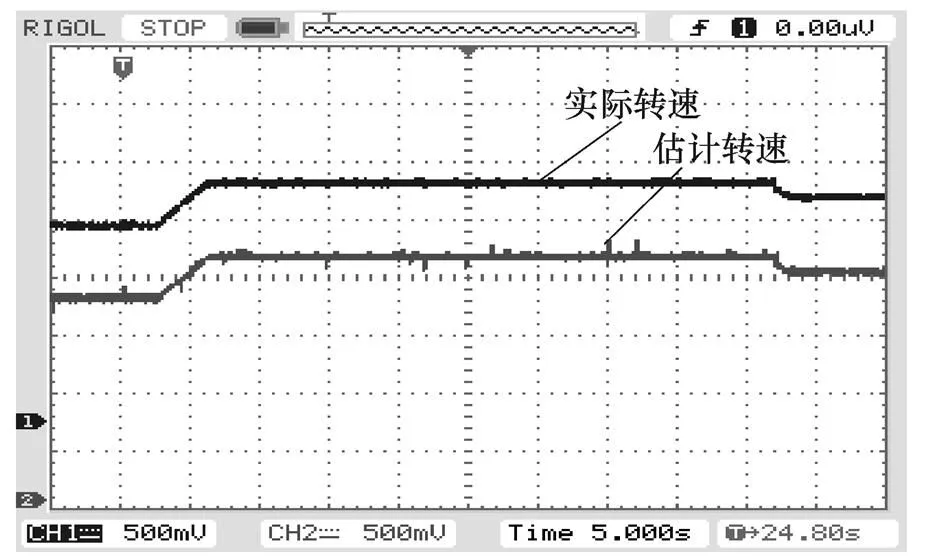
图15 突加负载时电动机的转速波形
4 结论
基于永磁同步电动机的全阶磁链观测器模型,设计了转速估计器,完成了对转速自适应律和反馈增益矩阵的设计,基于Matlab仿真平台,搭建了基于全阶磁链观测器的永磁同步电动机矢量控制系统仿真模型。仿真结果表明了该转速估计器能够在全速范围内各种工况下稳定运行,估计转速能够准确的跟踪实际转速,且转速误差在2%以内。基于仿真系统构建了基于DSP28055调速系统平台,完成了对转速估计器的开环实验验证。实验结果表明,该方法能够准确观测出电动汽车的转速信息,且转速估计精度高。
[1] 黄小庆, 陈颉, 田世明, 等. 电动汽车充电站规划、运行中的大数据集成应用[J]. 电网技术, 2016, 40(3): 762-767.
[2] 林颖, 王长林. 车载列车自动防护系统对空转及滑行的检测与校正方法研究[J]. 城市轨道交通研究, 2011, 14(3): 28-31, 36.
[3] 刘文霞, 张蕾蕾, 刘宗歧, 等. 城市纯电动汽车发展模式论证方法[J]. 电力系统自动化, 2014, 38(24): 34-40.
[4] 孔龙涛, 程明, 张邦富. 基于模型参考自适应系统的模块化磁通切换永磁直线电机无位置传感器控制[J]. 电工技术学报, 2016, 31(17): 132-139.
[5] 徐心怡. 基于扩展滑膜控制器的PMSM无速度传感器探究[J]. 电子测试, 2015(5): 4-6.
[6] 袁庆伟, 赵荣祥. 三相四开关逆变器供电的IPMSM直接转矩控制系统建模与分析[J]. 电工技术学报, 2017, 32(15): 76-88.
[7] 郭绪猛, 刘景林. 永磁同步电机直接转矩控制研究与仿真[J]. 微电机, 2007, 40(4): 12-14.
[8] 侯利民, 郭凤仪, 宋绍楼, 等. 无速度传感器的PMSM最优转矩控制系统研究[J]. 长春工业大学学报, 2008, 29(5): 526-529.
[9] 周喆, 吴俊, 杨俊翔, 等. 异步电动机无速度传感器矢量控制研究[J]. 电气技术, 2016, 17(12): 41-44.
[10] 应凯, 蒋林, 李洪波, 等. 基于定子电流模型的MRAS系统仿真研究[J]. 电气技术, 2012, 13(9): 19- 23.
Design of speed estimator for electric vehicle
Qin Junlong Jiang Lin Liu Lianghong Yuan Man Zhong Hongbo
(School of Electrical and Information Engineering, Southwest Petroleum University, Chengdu 610500)
A new speed measuring system based on speed sensorless principle is presented to solve the problem of high rate of faults in the existing electric vehicle speed measurement system. The main topology of the speed measuring system adopts the DC-AC structure, the instantaneous current and voltage value of the detecting system, the vector control strategy, the equivalent model of permanent magnet synchronous motor is a DC motor, according to the feedback of current and voltage signal using the DSP trigger pulse is generated in the software, control motor driver module SVPWM. Based on the TMS320F28055 control chip of TI company, the control platform of the speed estimation system is built. The simulation results show that the speed estimator can realize the accurate tracking of the estimated speed to the actual speed, and meets the design index in theory. In open-loop conditions, the physical object has also been verified.
PMSM; vector control; DSP; full order flux observer; speed sensorless
2017-11-27
秦峻龙(1993-),男,四川成都人,本科,主要从事电机及其控制工作。
四川省创新训练项目(201610615008)
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年11期)2014-04-04
电力工程技术(2014年1期)2014-03-20
