基于BIM技术的支吊架自动布设系统研究
2018-06-20 02:21马勇军李鹏尧尹紫红
交通科技 2018年3期
马勇军 李鹏尧 单 雨 尹紫红
(1.中铁十二局集团电气化工程有限公司 天津 300308; 2.西南交通大学 成都 610031)
建筑信息模型(building information modeling,BIM)是当下的热门话题,它以三维数字技术为基础,可对工程项目相关信息进行详尽表达[1],目前已应用通用BIM软件Revit来进行综合管道支吊架布设设计。
在设计阶段,尽管Revit软件具有强大的筛选图元、隐藏图元的功能[2],但由于支吊架布设具有很高的随机性,因此在已建好的管网模型中布设支吊架仍是一个费时费力的工序。在现场施工阶段,由于管道数量大、分布广、种类繁多,支吊架布设显得尤为繁琐,存在人工作业重复性多、工作效率低、作业成本高、精度控制低、错误率高、安全隐患大、作业环境差等缺点[3]。
本文以成都地铁5号线机电安装工程为背景,从设计和施工2个阶段对支吊架的自动布设进行研究探讨。在设计阶段,该布设系统运用其基于Revit软件开发的自动布设程序初步确定支吊架布设位置。并将初期布设位置进行受力分析并对各专业管道进行碰撞检查,经改进得出优化方案。在施工阶段,其能通过激光扫描技术对管道模型进行扫描采集数据,形成一个基于BIM的隧道实况立体模型。并将现场扫描模型与在Revit中所建模型进行整合统一,确定支吊架在现场布设的具体位置。运用TCA自动全站仪对支吊架安装部位进行现场定位放样,实现支吊架的自动布设。
1 支吊架自动布设程序
1.1 支吊架布设平台开发
本系统以Revit为平台,利用Visual C++进行二次开发生成支吊架辅助布置程序。在Revit程序中建立接口进行对接,将BIM三维机电模型导入支吊架辅助布置系统,该系统自动识别管道模型并根据支吊架布置原则对支吊架进行定位布置[4]。其中,支吊架布设流程见图1。
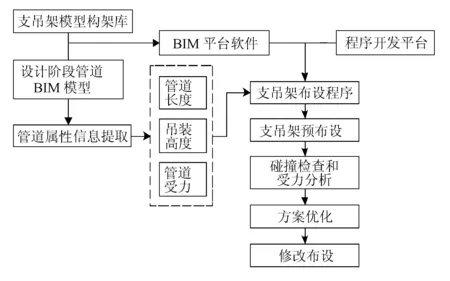
图1 程序框架图
1.2 支吊架布设模拟
以Revit为平台,Visual C++作为开发工具,在程序中建立不同类型支吊架模型数据库。对管道先进行功能分类及管道受力分析。接后程序进行自动计算并形成布设方案,并自动预布设。程序对管道和支吊架同时进行碰撞检查[4]。
1.3 布设方案优化
在对管道和支吊架进行碰撞检查后,程序将自动分析支吊架受力情况及管道在受力后的变形以对支吊架布置方案进行优化。
在智能布置支吊架后进行受力检查时,发现风管受力变形较大,有发生向下垂直位移的趋势,需对支吊架方案进行优化。对管道受力变形较大的位置进行增加支吊架布设,在该部位已有支吊架上增加分支强化固定。经上述优化设计后,再次运行碰撞检查,此时支吊架受力达到最优。
2 点云数据采集
2.1 数据采集原理
三维激光扫描仪从被测物体中提取的数据包括:①各点位的水平方向偏角和竖直方向偏角;②各点位与仪器之间的距离;③各点位的反射强度.其中水平方向偏角和竖直方向偏角是由连续转动的反射棱镜角度值计算而得;各点位到仪器之间的距离是由激光束的传播时间计算而得。根据各个点位的距离信息和角度信息确定它们的三维坐标,根据反射强度对各个点位进行颜色匹配[5]。假设一个点位P,其空间关系如图2所示。
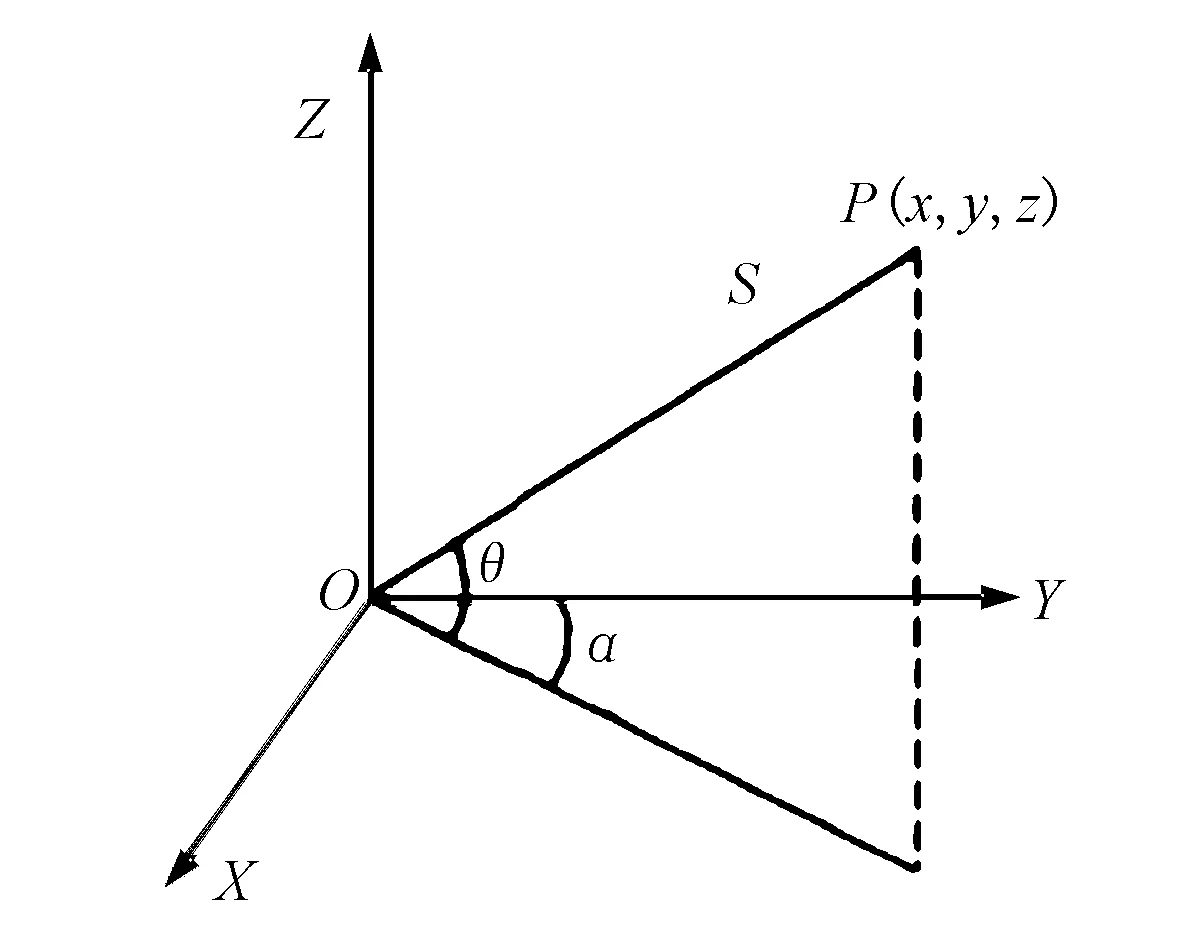
图2 三维激光扫描仪定位原理
其中:α为激光束的水平方向角,θ为激光速的竖直方向角,S为P点位到仪器的斜距。P点位的坐标计算方法为
x=Scosθsinα
y=Scosθcosα
z=Ssinα
2.2 扫描仪系统硬件的空间布局
将激光发射器发射口对准带标志点的两正交平板,将相机置于光源的任意一侧进行点云捕捉,基于正交平板对线激光的往返时间进行数据统计。将激光发射器和相机位置摆设好后,将相机拍摄方向聚焦在转台旋转中心与转台边缘的中心,此时激光扫描轴线与相机拍摄轴线的夹角大致为45°;激光发射器的发射下限为50°,上限为80°,转台式扫描仪系统硬件的空间布局见图3[6]。
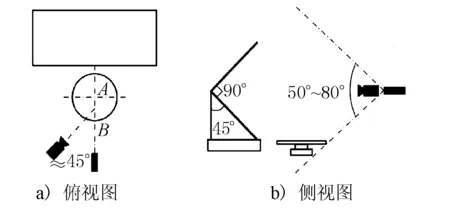
图3 扫描仪系统空间布局图
2.3 现场三维扫描成像
在施工现场,通过对现场结构进行全方位三维扫描还原隧道在支吊架布设前的原始状况,准确反映隧道偏差值。本项目采用莱卡超高速三维激光扫描仪P20。其扫描流程为:将扫描仪架设在最适扫描位置,将标靶架设在控制点上进行扫描,每一站必须至少扫描2个标靶。
2.4 建立三维点云
利用三维扫描仪对现场结构进行全方位扫描后,从不同方位上获取点云并进行点云匹配;锁定点云重叠区域通过特定算法将综合管道各方向上的点云数据进行匹配拼接,整合数据,获得完整的综合管道点云[7]。利用Cyclone软件的GEGISTER模块可全自动完成站点拼接工作。其效果图见图4。

图4 自动拼接点云
三维激光扫描仪自动通过点云库调出综合管道各个点的三维坐标信息,与系统固定空间直角坐标系相匹配后得到现场结构基于该坐标系的参数化立体模型。其效果图见图5。

图5 三维扫描效果图
2.5 数据整合分析
为保证支吊架布设满足设计标准,将点云形成的三维模型与Revit所设计的模型数据统一格式进行对比分析,将存在信息出入的数据根据现场情况进行修改调整,得出最终的支吊架布设方案。
3 支吊架现场点位布设
在完成综合管道支吊架布设最终方案后,利用定位装置对TCA自动全站仪支吊架的布置进行现场放样,通过对支吊架钻孔的放样来标记支吊架安装的水平位置和垂直位置。
TCA自动全站仪是多维一体的三维坐标测量仪器,其主要功能包括电子角度测量、电子距离测量、计算机综合计算和数据储存。
3.1 点位布设原理
TCA自动全站仪主要以及坐标原理为基础对测量功能进行设计开发。在实际操作过程中,全站仪一般安置在一个右手空间坐标系下,该坐标系以测试点Q作为原点,Z轴方向指向铅锤方向,X轴,Y轴共同组成水平面[8]。最后根据极坐标定位原理获取三维坐标,坐标计算如下
x=Scosβcoα
y=Scosβsinα
式中:S为斜距;α,β分别为水平角、垂直角;R为地球曲率半径值;k为大气折光系数。
3.2 点位放样
施工现场进行作业时,在事先规定的控制点固定TCA全站仪,用电子气泡整平仪器。随后进行测站定向工作:
1) 在仪器中输入仪器固定控制点点号GPS1,确认后输入全站仪高度;接着输入后视控制点点号GPS2,最后输入后视控制点棱镜的高度。
2) 将望远镜瞄准后视点棱镜位置,然后进行测量确认。
3) 定向起算边长的检核:采用TCA全站仪的放样功能,放样测站后视点GPS2,核实检查测点数据误差是否在规定范围内。
4) 在TCA全站仪里输入放样点点号,全站仪将自动显示放样点与测站点的方向和距离偏差。
5) 将水平度盘旋转到放样点方向,并锁定水平度盘,使用望远镜粗瞄。
6) 立尺员自行调整360°棱镜,立桩并利用RCS遥控系统进行自助放样。确定支吊架钻孔的空间位置和具体走向。
4 自动走行定位
在对支吊架布设点位进行现场放样后,需要根据这些现场点位的实际情况确定一条合理的走行线路来进行点位钻孔。
4.1 传感器捕捉点位
为使全自动钻孔机准确定位在运用TCA自动全站仪放样而得到的支吊架布设点位,施工人员在钻孔机前方布置了5组超声波传感器,分别朝向钻孔机的北、西、东、西北和东北方。首先,锁定1个控制口发射1个不小于10 μs高频信号,模块会紧接着发送6个60 kHz左右的超声波;MSP430F149单片机开始进入待接收信号状态,由这5组超声波传感器发送的各个支吊架布设点位的超声波信号返回后会直接存入单片机。
4.2 走行路线分析
由超声波传感器捕捉到的每一个点信号传入MSP430F149单片机,单片机便会输出1个持续的电频信号,该电频信号的持续时间就是超声波从发射到返回的时间,亦即该点位相对于全自动钻孔机走行起点的距离。当对所有支吊架点位距离和方位角分析结束后,MSP430F149单片机可利用其PC端协同分析出钻孔机最适走行线路。
4.3 走行驱动
在MSP430F149单片机完成路径规划后,全自动钻孔机便可依照规划路径逐一到达支吊架布设指定点位。该钻孔机采用QZ-DCC9010直流电机控制走行方向;驱动方面,全自动钻孔机采用DCC8005电机驱动器。
该钻孔机的动力底盘由MSP430F149单片机的ECU接收超声波传感器返回信号将速度信息传送给驱动器,驱动器带动步进电机给钻孔机提供前进动力,由电机控制油门从而控制钻孔机的运行速度,在油门开度达到恒定的同时,该钻孔机的运行速度达到恒定[8]。其油门控制流程见图6。
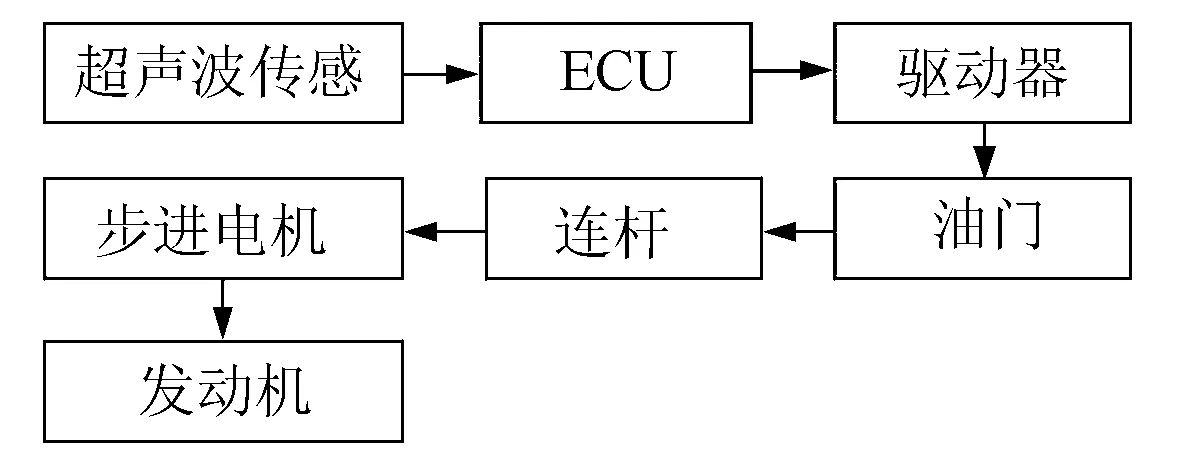
图6 油门控制流程图
4.4 定点钻孔
全自动钻孔机通过识别超声波信号自动走行到支吊架布设点位后,其钻杆通过机械拉伸和变幅将带有活门的钻头对准指定的钻孔点位。该钻孔机利用动力扭转装置给钻杆提供一定的扭矩使钻杆产生高速旋转,使钻头产生该高程上的圆孔;动力装置提供动力,使钻孔深度直至指定孔深。
5 结语
1) 以Revit软件为平台,Visual C++为开发工具,进行二次开发,添加管道支吊架辅助布置程序,建立接口对接,形成了1个基于BIM的支吊架布设程序,在设计阶段,该程序可以保存所有构件的基本信息并形成数据库,辅助设计人员快
速、便捷、高效地对支吊架进行受力分析并确定支吊架布设位置。
2) 将上述程序与现场施工所运用的三维扫描技术、TCA自动放样技术及走形定位技术相结合,形成一个基于BIM的支吊架自动布设系统,可解决当下人工布置支吊架中存在的支吊架分布广、数量大、种类繁多、人工作业重复性多、工作效率低、作业成本高、精度控制低、错误率高、安全隐患大、作业环境差等问题。
[1] 许炳,朱海龙.我国建筑业BIM应用现状及影响机理研究[J].建筑经济,2015,36(3):10-14.
[2] 薛忠华,谢步瀛.Revit API在空间网格结构参数化建模中的应用[J].计算机辅助工程,2013,22 (1):58-63.
[3] 张利,李岩,魏韬.石化管道应力分析及支吊架设计综述[J].化工设计通讯,2009,35(1):36-39,41.
[4] 刘济凡,熊峰.基于BIM的管道支吊架辅助布置系统[J].土木建筑工程信息技术,2015(1):30-36.
[5] 张会霞,陈宜金,刘国波.基于三维激光扫描仪的校园建筑物建模研究[J].测绘工程,2010,19(1):32-34,38.
[6] 李龙.三维激光扫描仪测控技术及回波信号处理方法的研究[D].西安:西北工业大学,2004.
[7] 孙景领,黄腾,邓标.TCA2003全站仪自动识别系统ATR的实测三维精度分析[J].测绘工程,2007(3):48-51.
[8] 黄建学.测量机器人单点测量精度试验研究[J].山西建筑,2015,41(9):192,212.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
建材发展导向(2021年6期)2021-06-09
装备制造技术(2020年2期)2020-12-14
航天制造技术(2020年4期)2020-09-11
化工管理(2020年17期)2020-01-14
模具制造(2019年3期)2019-06-06
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
浙江大学学报(工学版)(2016年10期)2016-06-05
现代营销·经营版(2015年3期)2015-04-20