
射频RSS聚类与多传感器融合的室内定位算法
2018-06-19 12:57王芳
计算机工程与设计 2018年6期
王 芳
(重庆商务职业学院 出版传媒系,重庆 401331)
0 引 言
随着多媒体业务数据的不断增长,人们对定位和导航的需求日益增大,尤其是在复杂的室内环境,存在着卫星信号盲区,场景中需要提供目标人员或者物体的实时位置信息[1-3]。如何将RSS信号转换成实时准确的位置信息成为国内外研究的热点[4,5]。从本质上讲,基于RSS的主流室内定位技术分为三大类:一类是基于WIFI的室内定位技术:其核心是采用基于RSSI的测距方法,具有网络成本低、复杂度低、通信能力强等优点,但是算法必须在室内提供网络环境,且信号易受环境干扰[6]。第二类是基于RFID的室内定位技术:采用刷卡方式,根据阅读器位置进行区间定位,这种方法具有较高的定位精度,但是标识没有通信能力,定位距离较短[7]。第三类是基于蓝牙的室内定位技术,蓝牙设备具有体积小、功耗低、易集成、易普及等优点,缺点是实时性较差、传播距离短、稳定性差[8,9]。综上所述,目前基于RSS的室内定位方法普遍存在信号传播易受环境干扰,精度较低、传播距离短等缺点。本文在综合考虑应用需求、网络成本、RSS信号强度规律等因素的基础上提出了一种基于射频RSS聚类与多传感器融合的室内定位算法,并在智能终端上开发了一套室内定位系统,在指纹库创建阶段,对蓝牙信号强度进行了加权聚类,并引入LSM303DLHC加速度传感器来补偿指纹阶段的欧氏距离加权平均算法产生的误差。最后通过实验验证该算法有效解决了室内复杂环境因素所造成的影响,并具有较高的定位精度,为网络通信与无线定位提供了借鉴与参考。
1 数学模型
1.1 蓝牙系统模型
一套完整的蓝牙系统模型,由阅读器(Reader)与电子标签(TAG)及应用软件系统3个部分所组成(如图1所示)。其中,蓝牙4.0有源电子标签通过全向天线向一定空间发射无线蓝牙信号;当阅读器进入信号范围时,可阅读到从机发射出的广播内容,广播中包含标签号、MAC地址等信息,回调advData中包含电子标签信号强度RSSI等信息。
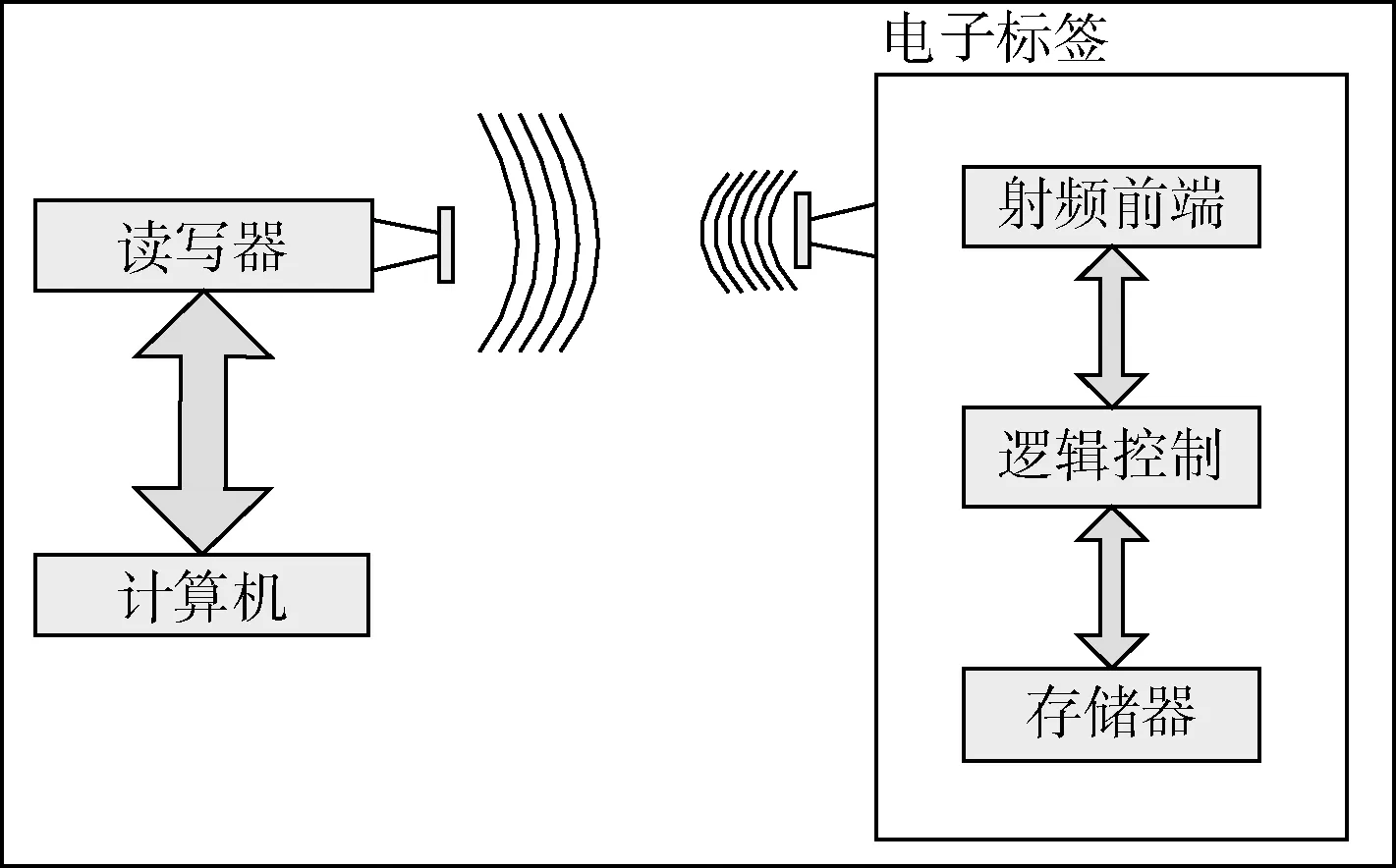
图1 蓝牙信号识别系统
1.2 RSS测距模型
无线信号的强度会随着传播距离的增加逐渐变弱,信号强度的衰减和距离满足Shadowing传播模型[10]
(1)
在本算法的应用中采用简化后的Shadowing模型
(2)
式(1),式(2)中d0是参考距离,通常取值为1 m,d为实际距离,p(d)和p(d0)分别是距离为d和d0时路径损耗值,ξ是遣蔽因子,路径损耗值为初始发射信号与接收信号强度之差
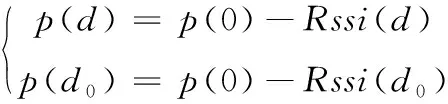
(3)
其中,p(0)为初始发射信号强度,Rssi(d)和Rssi(d0)分别是距离为d和d0处的接收信号强度值。本算法中取d0=1m,A=-Rssi(d0)从而得到实际应用的Rssi测距公式
Rssi(d)=-(10nlg+A)
(4)
其中,A和n为待定参数,其中A为距离信号发射源1 m处接收到的信号强度平均值的模,n为信号传输常数,与信号传播环境相关。
1.3 方向角测距模型
加速度计三轴分量为重力加速度在载体坐标系下的分量数值[11,12],当定位终端水平放置时载体坐标系的初始姿态与参考坐标系重合,此时加速度计三轴分量(数据经标准归一化处理)
G[0,0,0]=[001]T
(5)
当定位终端处于不同姿态时,其三轴分量为
G[γ,θ,ψ]=[GxGyGz]T
(6)
利用方向余弦矩阵
可得
G(γ,θ,ψ)=T(γ,θ,ψ)G(0,0,0)
(7)
俯仰角和翻滚角分别为

(8)
地磁场矢量H可分解为水平分量Hh,垂直分量Hv,Hh总是指向地磁的北极,Hh在两轴上的分量分别为Hx和Hy,由此可得水平放置时的方向角
(9)
2 系统设计与算法流程
本文提出的基于射频RSS聚类与多传感器融合的室内定位算法分为系统设计与算法实现两个模块,系统设计中描述了蓝牙标签AP设计、AP点的布设、定位终端的设计以及指纹勘测设计,算法实现中则详细描述了LSM303DLHC传感器融合以及欧氏距离加权求取坐标两个模块。
2.1 系统设计
(1)蓝牙标签设计
蓝牙电子标签具有成本低、功耗低、易部署安装,体积小、轻便等特点,本系统中使用的蓝牙标签为CC2541,工作频率2.4 GHz-2.5 GHz ISM微波段,通信协议BLE4.0,发射功率 -23 dBm~+4 dBm,识别距离0~50 m(2 dBi全向天线),本项目中用的15号标签完整广播内容(16进制):02010407ff440000000f4b,广播内容总长度为11字节,起始标志为16进制44,结束标志位为4b,中间部分为11个字节的预留信息和3个字节的标签号,设计电路中I2C接口增加了STK3310环境光传感器、巴伦电路之后增加了电阻衰减网络,以方便进行射频信号的衰减配合定位算法。
使用packet sniffer嗅探软件测试蓝牙标签强度衰减,在发射功率为+4 dbm,距离为1 m的条件下,蓝牙标签信号发射稳定,RSSI(dbm)跳变如图2所示。
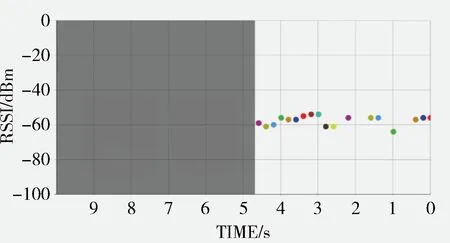
图2 蓝牙标签信号跳变散点
(2)AP点部署
蓝牙标签布置在房间的天花板上,每个标签可以覆盖室内一定面积的圆型区域,通过合理布局使其实现房间整体面积的覆盖,标签部署规则如图3所示。
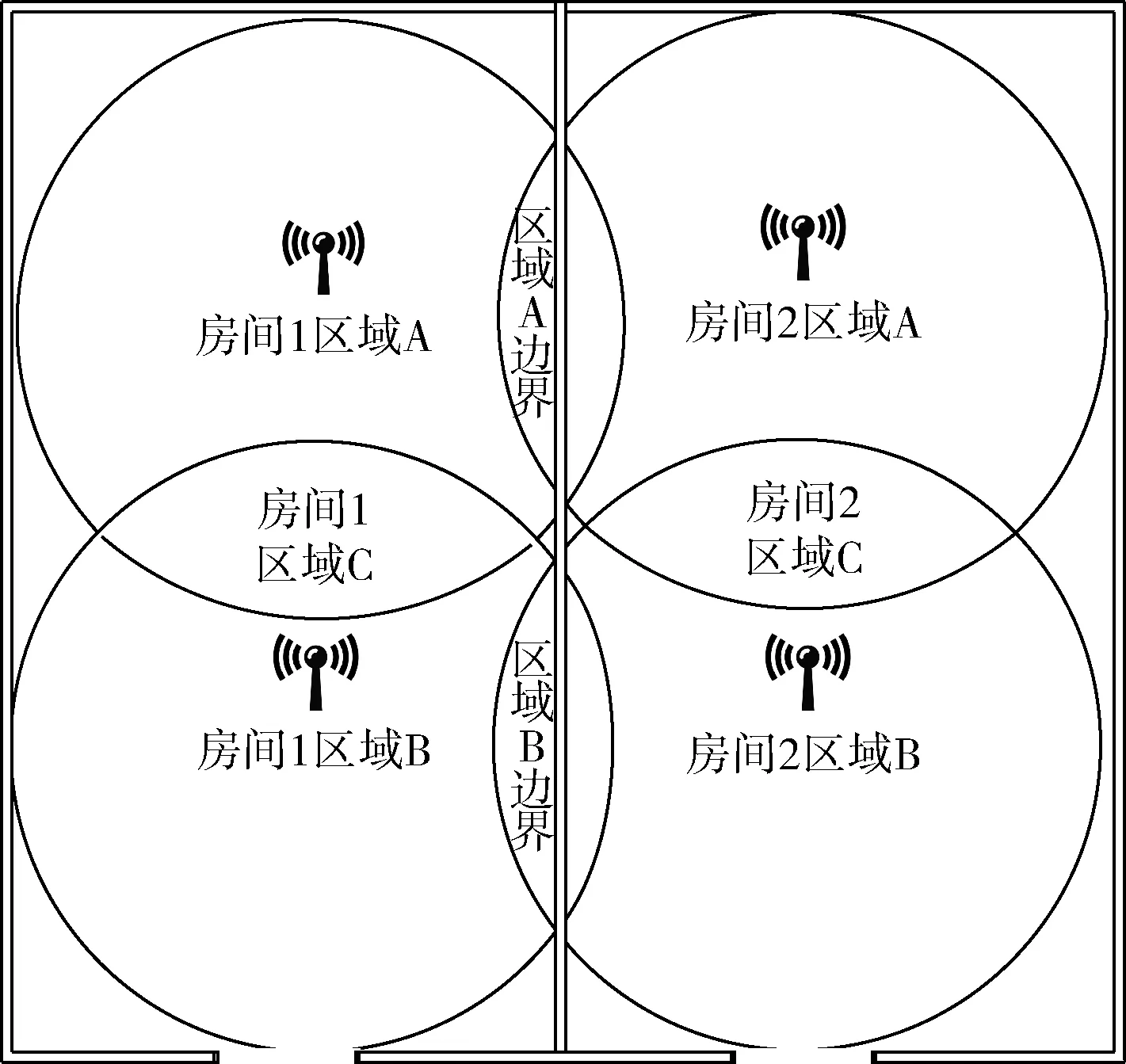
图3 标签部署规则
(3)定位终端设计
经过分析与对比,在服务器端采用指纹匹配算法,服务器收到一组终端上传的数据,数据根据实时时间来进行分组,然后将实时数据与生成指纹库中的数据进行计算比对,本系统中使用的定位终端MT2503实物如图4所示。
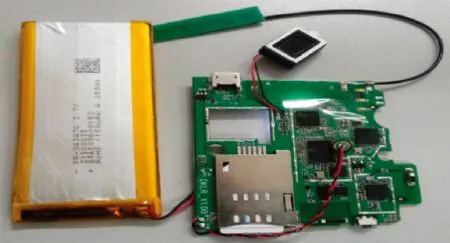
图4 MT2503实物
终端中初始化蓝牙模块,配置引脚以后,可勘测前文设计的蓝牙标签发出的数据,其中包含标签MAC地址、标签号、RSSI(dbm)、同步时间等信息,终端将接收到的数据处理后,按照与服务器设定的接口协议,可将数据插入到相应的数据库中,定位终端工作流程如图5所示。
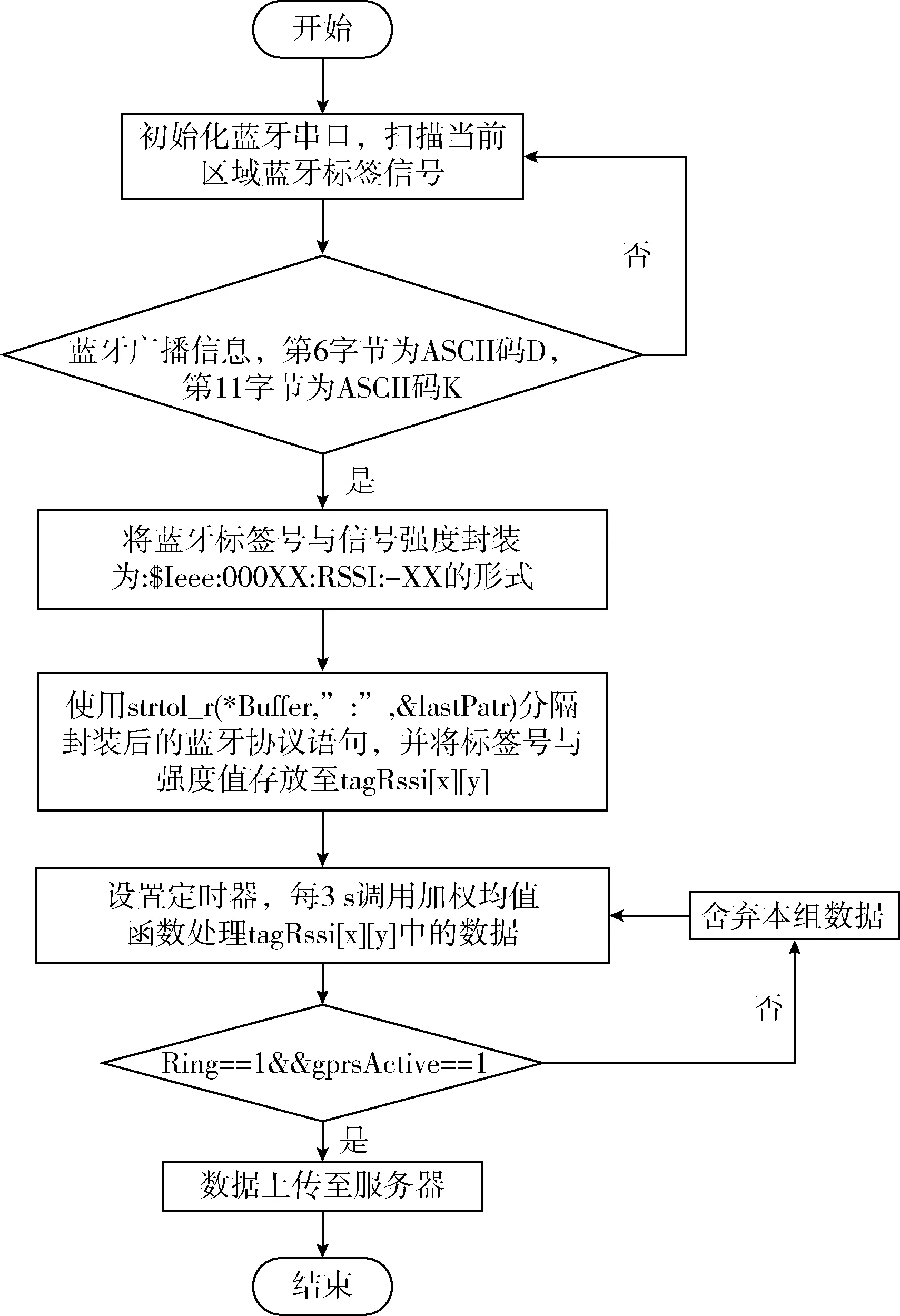
图5 定位终端MT2503工作流程
(4)指纹离线勘测设计
1)接口回调Url
数据库中将标签号BtId与对应地图的Url进行映射绑定,采集终端将勘测到蓝牙信号上传至服务器,服务器通过接口回调与蓝牙信号对应的地图Url。
2)Json数据通信
点击地图上任一点出现界面如图3所示:此时输入终端标识IMEI号,指令标志位等信息,点击指令下发按钮,即可将信息打包成Json数据下发至定位终端。
3)指令接收
此时将接收到的蓝牙标签号+对应的信号强度+IMEI号+APP自动获取坐标上传至服务器,当数据量达到指定阈值时停止信号采集操作,APP设计如图6所示。

图6 手机APP界面及点击后触发界面
2.2 算法实现
(1)LSM303DLHC传感器融合
加速度计传感器(LSM303DLHC)是一个超小型高性能的电子罗盘,具有三维加速度传感器和3D磁力模块,可以实时监测定位终端的朝向,由于人体遮挡以及信号跳变,补偿指纹阶段的欧氏距离加权平均算法产生的误差。
在实际的定位过程中,定位终端不可能一直保持水平状态,则必须计算其俯仰角以及翻滚角,设当前定位终端的翻滚角为γ,俯仰角为θ,方向角为ψ,磁强传感器三轴数值M(γ,θ,ψ)=[MxMyMz]T,水平放置时磁强传感器三轴数值M(0,0,ψ)=[MhxMhyMhz]T,根据定位终端姿态与水平放置时的关系可得
(10)
其中,Rγ,Rθ分别为翻滚角取γ,俯仰角取θ时的旋转转化矩阵
(11)
将式Rλ,Rθ带入式(10)中可得
将其带入1.3节方向角计算模型式(9)可得出
(12)
融合传感器之后的指纹库采集流程如图7所示。
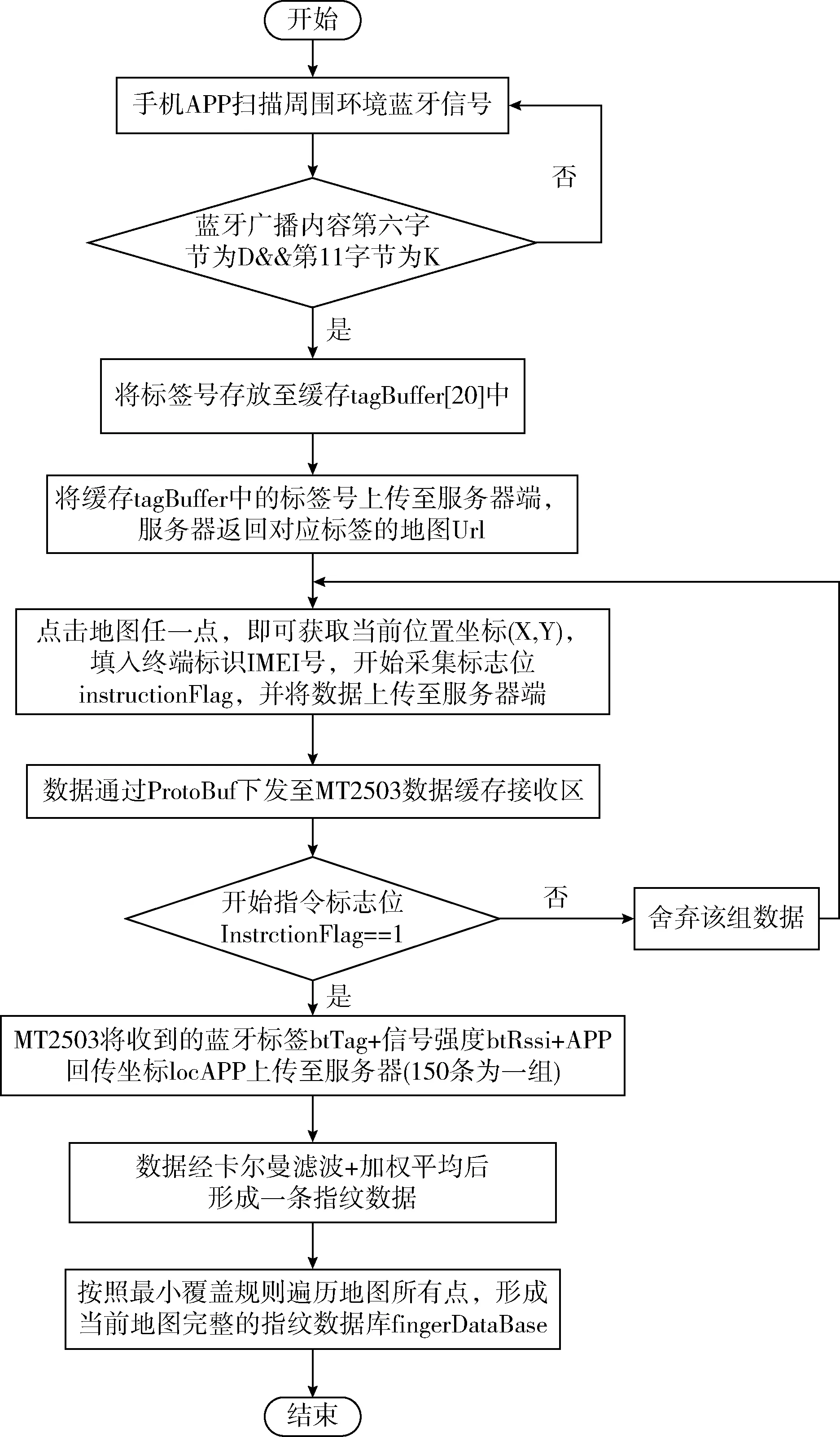
图7 指纹库采集算法流程
(2)欧氏距离加权匹配算法
在定位终端MT2503中,收到周围的1.5 s的蓝牙数据求均值并连同终端朝向上传至服务器,服务器根据接收到的实时向量与指纹库中的数据进行匹配,本系统中使用的匹配算法为最近邻匹配算法。
为了消除信号传播,传感器遮挡、信号跳变等因素带来的影响,在信号强度处理阶段将RSS信号强度划分为若干簇,对筛选出的指纹库中的坐标集合做欧氏距离加权聚类,得到最终的坐标。假设实时向量为m维向量xi=(Xi1,Xi2,…,Xim),指纹库中对应的坐标集合中任一坐标点对应的向量为:xj=(Xj1,Xj2,…,Xjm)。
为保证结果的精确性,算法中将权值做归一化处理,即n个待选坐标的权值系数集合满足
w1+w2+…wn=1
最后将实时向量与对应的指纹库坐标集合加权聚类形成最终坐标点
式中:n代表与该实时向量匹配的指纹库坐标个数。
3 实验结果及分析
本实验中的终端采用MT2503芯片,数据库采用PgAdminIII,终端中采用串口接收CC2541蓝牙芯片发出的信号强度。服务器采用CentOs6.5操作系统,部署DAS进行数据接入,DPS、DCS进行数据处理与报文转发,地图发布采用OpenLayers3,web定位效果展示如图8所示。
为了测试算法的性能,及分析定位误差,系统中首先使用5个AP节点来进行指纹库的采集,表1为不使用LSM303DLHC传感器融合,也未进行RSS欧氏加权聚类形成的指纹数据(NCNJ),表2为本算法中添加了改进措施后形成的指纹数据(PJ)。
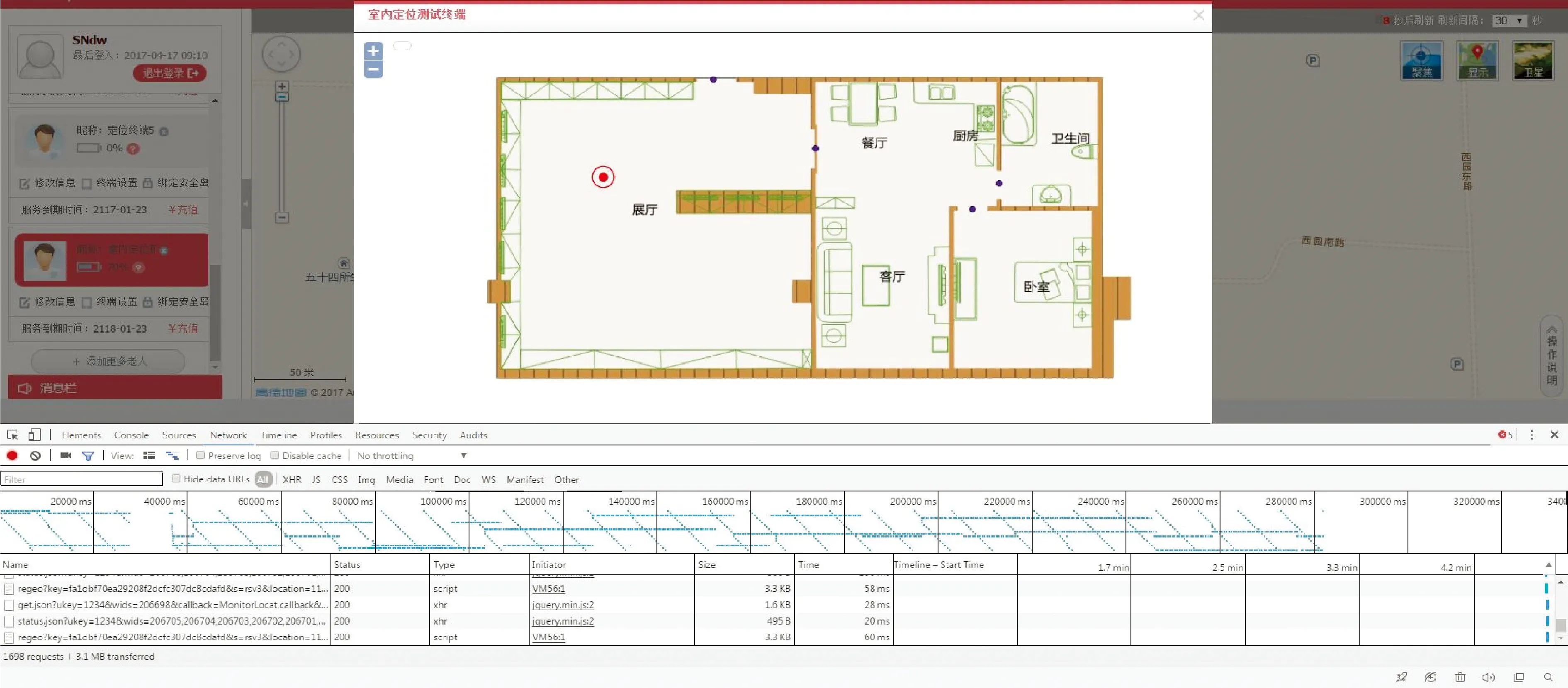
图8 定位展示效果
图9为RSSI测距、真实位置、以及算法得出的坐标比较图,实线代表真实位置与本算法坐标的距离误差,虚线代表真实位置与RSSI测距的距离误差,从图中可以直观的看出本算法得出的坐标与真实位置的距离误差更小。

表1 NCNJ指纹数据
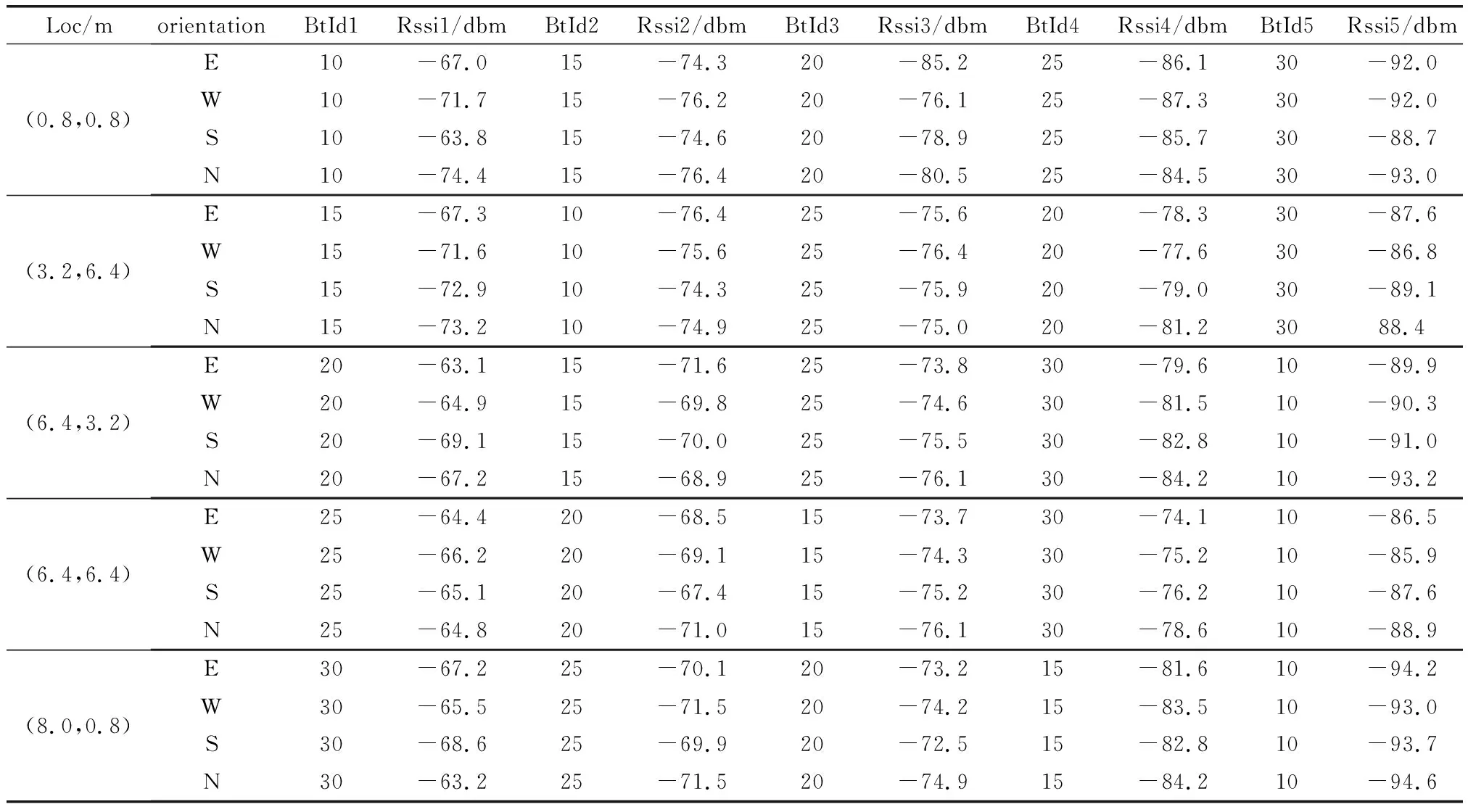
表2 PJ指纹数据
为了加快数据库查找速度,数据存储时按照信号强度均值由强到弱的顺序存储,例如当终端在(0.8,0.8)坐标点时,距离10号标签最近,此时数据库中将10号标签的信号强度置前。
实验坐标点对应的平均误差如图10、图11所示。
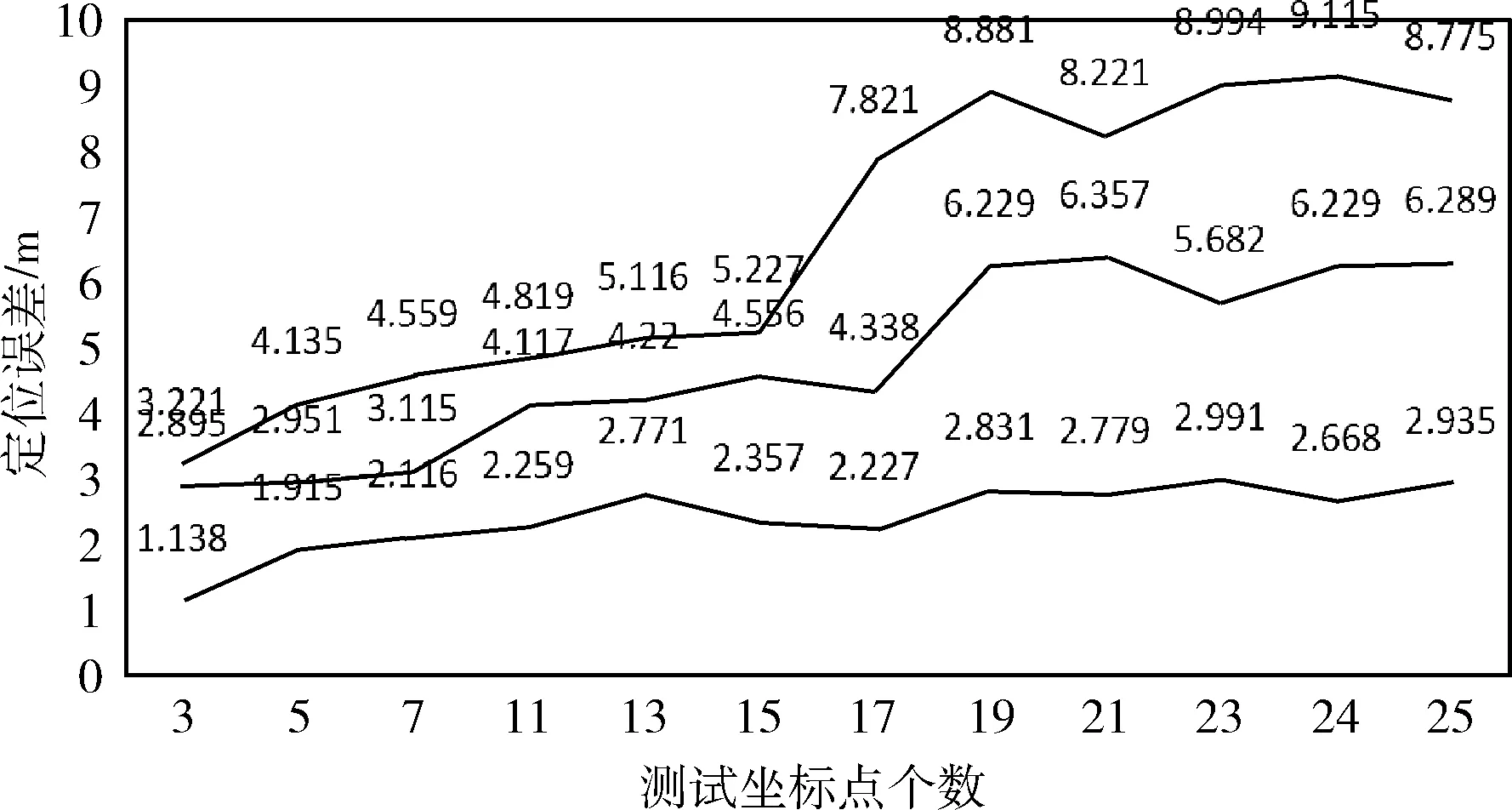
图10 坐标点对应相对误差曲线对比
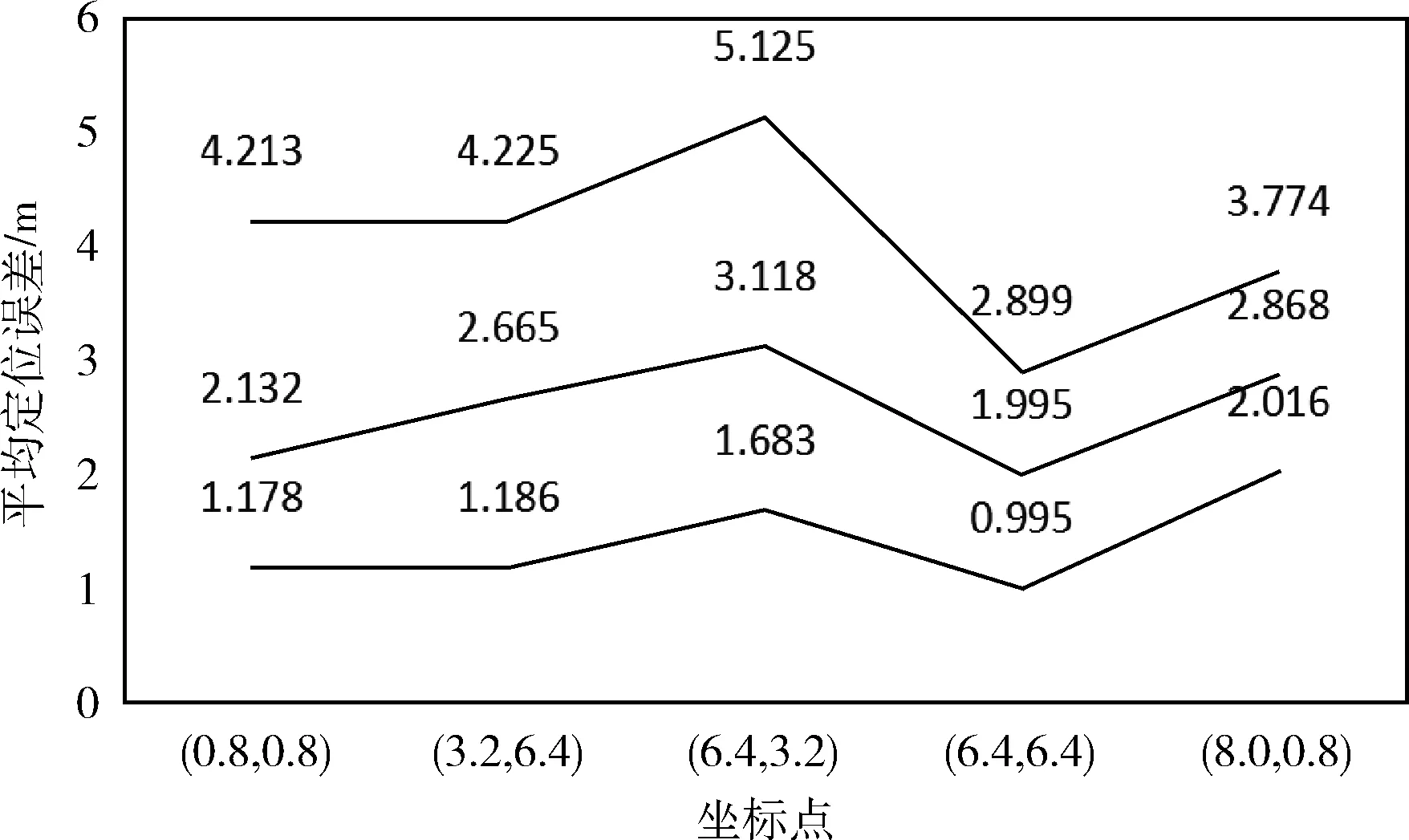
图11 标签个数平均误差曲线对比注:图10、图11中从上到下第一条曲线代表未添加RSS欧氏加权聚类也没有传感器融合定位误差曲线,第二条曲线代表添加欧氏距离加权聚类后的定位曲线图,第三条曲线代表本文算法中添加欧>氏距离加权聚类并融合LSM303DLHC传感器后的平均定位误差曲线。
从表1、表2与图10、图11中显示的数据来看,本文提出的基于射频RSS聚类与LSM303DLHC传感器融合的室内定位算法精度有较大的提高,而且在定位参考点数增加的情况下精度提升更为明显,平均定位误差控制在2.51 m,误差远低于同种环境基于WIFI与基于RFID的室内定位误差,本文开发出的室内定位系统具有鲁棒性强,扩展性好等优点,具有良好的参考价值与实际意义。
4 结束语
本文针对基于无线局域网室内定位算法中普遍存精度不高,实时性差等问题提出一种基于射频RSS聚类与多传感器融合的室内定位算法,在指纹库创建阶段,对蓝牙信号强度进行了聚类,在定位阶段融合LSM303DLHC传感器来补偿指纹阶段的欧氏距离加权平均算法产生的误差。实验结果表明,该算法解决了室内复杂环境因素所造成的影响,并具有较高的定位精度,为网络通信与无线定位提供了借鉴与参考,本算法后续会继续添加陀螺仪,气压计等传感器,可用来判别定位终端具体形态,所处高度等,此外,本文使用的是串口接收数据,定位速度相对较慢,后续会采用直接提取射频广播字段,从而加快定位的实时性。
参考文献:
[1]SHI Xin,YIN Aimin,CHEN Xi.RSSI and multidimensional scaling based indoor localization algorithm[J].Chinese Journal of Scientific Instrument,2014,35(2):261-268(in Chinese).[石欣,印爱民,陈曦.基于RSSI的多维标度室内定位算法[J].仪器仪表学报,2014,35(2):261-268.]
[2]ZHAO Rui,ZHONG Bang,ZHU Zuli,et al.Overview of indoor localization techniques and applications[J].Electronic Sci & Tech,2014,27(3):154-157(in Chinese).[赵锐,钟榜,朱祖礼,等.室内定位技术及应用综述[J].电子科技,2014,27(3):154-157.]
[3]LIU Chunyan,WANG Jian.A constrained KNN indoor positioning model based on a geometric clustering fingerprinting technique[J].Geomatics and Information Science of Wuhan University,2014,39(11):1287-1292(in Chinese).[刘春燕,王坚.基于几何聚类指纹库的约束KNN室内定位模型[J].武汉大学学报:信息科学版,2014,39(11):1287-1292.]
[4]ZHANG Wenjie,DONG Yuning,WANG Xinheng.Indoor positioning method using RFID and block clustering[J].Computer Engineering and Applications,2016,52(10):112-117(in Chinese).[张文杰,董育宁,王新珩.一种利用RFID和块聚类的室内定位方法[J].计算机工程与应用,2016,52(10):112-117.]
[5]YANG Guanglong,KONG Yongping,ZHONG Zhimin,et al.Mutimode-fingerprint matching based indoor positioning system design and implementation[J].Computer Engineering and Design,2013,34(5):1896-1900(in Chinese).[杨广龙,孔勇平,钟致民,等.基于多模指纹匹配的室内定位系统设计与实现[J].计算机工程与设计,2013,34(5):1896-1900.]
[6]Medina C,Segura J C,De la Torre A.Ultrasound indoor positioning system based on a low-power wireless sensor network providing sub-centimeter accuracy[J].Sensors,2013,13(3):3501-3526.
[7]Shin M,Cho S H,Joe I.An experimental analysis of effects of IEEE 802.11 channels on RSSI-based indoor localization system with IEEE 802.15.4[J].IETE Journal of Research,2013,59(5):500-509.
[8]Liu T,Chi T,Li H,et al.A GIS-oriented location model for supporting indoor evacuation[J].International Journal of Geographical Information Science,2015,29(2):305-326.
[9]Huang C N,Chan C T.A zigbee-based location-aware fall detection system for improving elderly telecare[J].International Journal of Environmental Research and Public Health,2014,11(4):4233-4248.
[10]Luo J,Zhan X.Characterization of smart phone received signal strength indication for WLAN Indoor positioning accuracy improvement[J].JNW,2014,9(3):739-746.
[11]Amanatiadis A.A Multisensor indoor localization system for biped robots operating in industrial environments[J].IEEE Tran-sactions on Industrial Electronics,2016,63(12):7597-7606.
[12]Lymberopoulos D,Liu J,Priyantha N A B,et al.Indoor localization using commercial frequency-modulated signals:U.S.Patent 9,271,120[P].2016-02-23.
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
工业设计(2022年7期)2022-08-12
中成药(2022年1期)2022-01-27
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
现代测绘(2018年1期)2018-03-06
玩具世界(2017年8期)2017-02-06
测绘通报(2016年9期)2016-12-15
