ZigBee技术在智能识别车辆中的设计方法
2018-06-17 11:16王政何萍
无线互联科技 2018年2期
王政 何萍
摘 要:文章研究的专用车道自动识别系统是采用了ZigBee技术结合新型传感器技术进行对非法车辆的监控的实现,在无监控交通系统模式下,达到有效地自动识别非公共交通车辆。系统可以在整条的专用车道上进行安装,也可以在环境复杂路段实施;这样,系统建设费用要远远低于当前使用的城市交通监控系统,使城市在经费不多情况下,使专用车道真正意义上达到高效率地运行。
关键词:ZigBee技术;非接触式;通信网络;智能识别
智能交通已经是未来交通发展趋势。为了更好地规划交通畅通,我国每个城市都已经设置了公共交通的专用车道。本文研究的专用车道自动识别系统是采用ZigBee技术结合传感器技术进行对非法车辆的监控的实现,设计上无需建立多点监控摄像头系统,从而达到有效的监控和识别。该系统可以在城市的公交专用车道上进行安装,即使是复杂路段也可以实施;此外,该系统建设费用上也远远低于目前使用的监控系统,使城市在经费不多情况下,也可以建立该系统,从而使专用车道真正意义上达到运行高效率。
1 技术方法
ZigBee技术是一种无线连接,工作频率可达到2.4 GHz,具有最高250 kbit/s传输速率,它的传输距离在10-75 m的范围内,而且可以繼续增加。因此,在专用车道的布局上可以较远距离进行设置,技术实施性高[1]。ZigBee作为一种物联网无线数据传输终端,在智能交通、智能电网、智能家居、工业自动化、数字化医疗等领域应用越来越广泛。针对车辆智能识别,以区别哪些是公共交通车辆,哪些是私家车辆,ZigBee技术是一个很好的尝试和选择。 为了更方便地采集信息,系统采用无线传感器技术。无线传感器技术可以看成是由数据获取网络、数据颁布网络和控制管理中心3部分组成的。其主要组成部分是集成有传感器、处理单元和通信模块的节点,各节点通过协议自组成一个分布式网络,再将采集来的数据通过优化后经无线电波传输给信息处理中心。
1.1设计原理
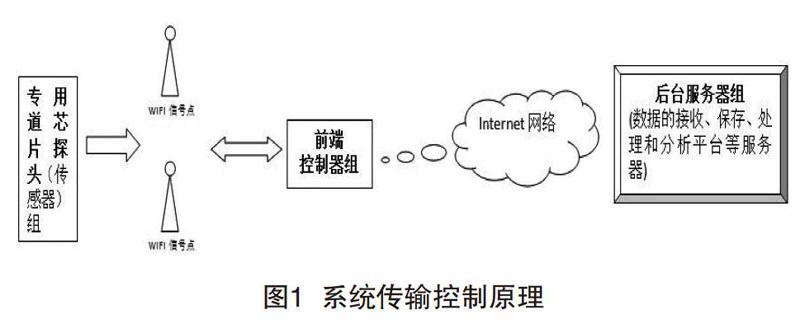
本文采用在专用道旁埋设传感器,通过ZigBee网络将在专用道行驶车辆进行快速识别,公共车辆安装好识别芯片,非公共车辆不设置,这样,传感器根据芯片来区别是否为公共车辆,还是其他车,在根据采集的信息与后台数据匹配,进行相关的区分,如图l所示。
1.2主要硬件架构
系统硬件分为前端数据采集、传输部分和后台数据处理服务器部分,前端部分主要进行信号的采集和转换,依据专用车道实际情况进行多点布设;服务器部分主要是对数据的存储、处理和二次数据分析和汇总。
1.2.1前端部分
主要控制器采用西门子S7-224型可编程序控制器,主要是将传感器采集的数据进行接收、上传,采用无线网络进行通信交换,使系统适应多种模式的访问。
传感器探头,系统根据距离分配多个探点,通过多路传输,有利于数据接收的稳定性和实时性。
数据传输控制器,将采集的数据进行格式转换,被后端服务器可识别,该部分将数字量数据转换成类文本格式,使数据处理更为方便。
1.2.2服务器部分
服务器部分采用了西门子300系列PLC312型控制器,将多个基站数据进行汇总和收集,统一通过Internet网络发送到后台服务数据中心,后台服务器上位机系统根据需求,将数据进行归类存储,并能够实时查询和汇总。
数据转换模组,是将PLC数据信号进行转换,形成结构式的数据格式,以方便后端数据中心对数据的分类和存储,对二次数据分析有重要支持[2]。
2 系统设计方案
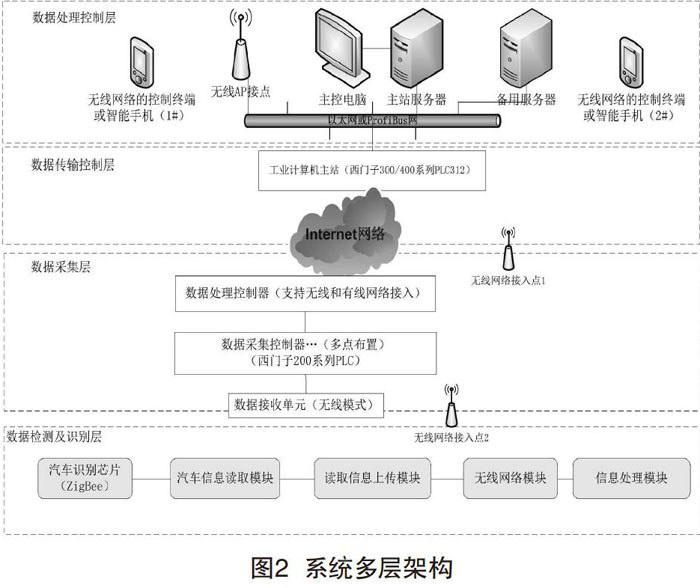
系统以多层架构模式,即:数据检测及识别层、数据采集层、数据传输层、数据处理控制层(见图2)。每层根据自身功能进行数据处理。数据采集层
2.1数据检测及识别层
数据检测及识别层是属于终端层,该层针对专用车道对过往车辆的识别,有汽车识别芯片(ZigBee技术)模块、汽车信息读取模块、读取信息上传模块、无线网络接入模块以及信息处理模块,该层主要功能是读取车辆信息,根据识别的车辆将汽车信息上传到数据采集层,数据采集层将获取到的数据,进行必要性验证,再次上传至数据传输控制层,控制层服务器通过格式转换将数据上传到后台数据处理控制层,数据处理控制层将数据与库中数据对比,如果不是专用车辆,将回执信息,一层层下传,最后数据检测及识别层数据处理模块将非专用车辆进行标示,并进行处理。
2.2数据采集层
数据采集层功能是将检测识别的数据进行二次处理,上传到上一层服务管理中。该层通过Internet网络,可以远程进行有效的传送。
2.3数据传输层
数据传输层是服务中的一个“基站”,作用类似服务器,属于区级层次的服务器,将数据进行有效的处理,并提交到总服务器上。
2.4数据处理控制层
数据处理控制层是系统核心层,所有的识别或采集数据的处理都是在此层完成,是工作最繁忙的一层。后台管理服务器管理大数据量的信息,根据不同地区的信息进行不断地对比和匹配,进行违章信息的处理和统计[3]。
3 系统主控制器模块的组成
系统主站采用西门子300系列PLC312型控制器,基站采用西门子200系列的PLC控制器,通过以太网进行数据通信,为前端和后台服务的数据通信做中间服务功能。
3.1主站模块组成
系统由1个主CPU控制器、2个数字量输入端、1个模拟量输入端、1个数字量输出端、1个模拟量输出端以及无线模块DTD433M组成。主要作为数据主控制进行数据处理和匹配。
3.2基站模块
系统基站采用西门子200系列PLC,主要将一次数据进行采集、处理、上传,在本模块中增加了无线网络模组,使系统支持无线访问和接入,适应多种模式的访问。
3.3服务器上位机软件平台
本文软件平台采用ASP.NET2.O+SQL SERVER2008系统,基于B/S(浏览器/服务器模式)架构,易于网络化、远程访问以及异构性良好的特点。根据前端传感器的监测和数据采集,通过Internet网络发送到基于B/S架构的数据服务器平台中,为数据的获取、保存、统计、分析有良好的帮助,为未来的识别数据信息系统提供有益的前瞻性研究[4]。
4结语
本文内容的提出是一个新的研究方向,可以在一定程度上改变现实中对复杂路段以及布线困难的环境下的项目实施,为未来智能交通的设计提出一个思路。其创新点是基于ZigBee技术与传感器技术的有效结合,以及无监控摄像头的模式下,对汽车识别进行有意义的前瞻性研究。
[参考文献]
[1]百度.ZigBee技术详细解析[EB/OL].( 2013 -12-02) [2017-12-18].https://jingyan.baidu.com/article/fb48e8be4461186e622e148e.html
[2]何萍,王政.基于ZigBee技术的PLC控制的专用车道自动识别系统架构[J].电子测试,2016 (12X):7-8.
[3]付玉志.基于ZigBee技术的智慧农业实时采集和远程控制系统[D].杭州:浙江大学,2015.
[4]丁卫东,柳祖鹏,刘明.城市公交专用车道系统规划与设置研究[J]交通科技,2004 (4):96-98.
猜你喜欢
现代电子技术(2016年24期)2017-01-19
中国新通信(2016年21期)2017-01-06
中国新通信(2016年21期)2017-01-06