无人机航拍技术在提高长绳跑绳成绩中的应用
2018-06-17 11:16奚彩莲林孟群
无线互联科技 2018年2期
奚彩莲 林孟群

摘 要:无人机航拍技术作为一种新兴的摄像技术,以其应用灵活、便捷高效等特点,正在各个领域得到广泛运用。在体育竞技中,无人机航拍技术尚未得到应用,然而它对运动轨迹、理论研究等提出的积极意义,为以后的研究指出了方向。文章基于长绳跑绳运动,运用航拍技术拍摄了队员跑绳运动轨迹,通过专业的视频分析软件分析了队员的跑绳轨迹及关键点,提出训练方案,应用在长绳训练当中。无人机航拍技术在体育中竞技具有良好的应用前景。
关键词:航拍技术;自动控制;软件工程;长绳跑绳;数据采集
随着跳绳运动日益兴起,长绳跑绳作为跳绳运动的一种,受到广泛的关注。在各大高校中,如何提高长绳队的成绩一直是一个广受热议的话题。因此,得到长绳队队员的运动形态以及整个队伍的运动轨迹,成为研究如何提高成绩的基础和前提。此外,在拍摄队员跑绳轨迹的过程中,如何垂直精确地描绘出跑绳路径、采集到相应数据对于实验过程具有重要意义,而这些数据往往由于比例尺、空间结构等因素难以采集,寻常采集方法容易导致误差过大,并且采集成本较高[1]。
无人机低空航拍遥感系统作为一项空间数据获取的重要手段,具有成本低、机动灵活、影像实时传输、高危地区探测等特点,是高分辨率遥感数据获取的重要工具之一。随着无人机遥感监测技术的迅速发展,该技术己成为国内外研究开发的热点,并在众多领域得到广泛应用。在长绳跑绳的研究中,无人机低空航拍占有重要优势[2]。
而到目前为止,无人机航拍技术还未在体育竞技研究方面得到应用。对于研究長绳队整体的运动轨迹以及单个队员在各个时刻的运动形态,无人机搭载高分辨率摄像、摄影设备进行航拍的方法都提供了有效的途径。特别是对于整体轨迹的研究,无人机航拍技术的研究大大提高了研究的效率,减小误差。并且通过航拍软件的应用,可以得到无人机航拍器的实时位置信息[3-4]。
1 研究对象和方法
1.1研究对象
华北电力大学长绳队队员的跑绳技术。
1.2研究方法
1.2.1无人机航拍飞行技术
运用无人机航拍技术可以从俯拍到长绳队队员跑绳的全过程,通过分析录像可以较精准地得到队员们的跑绳路径及关键点。
1.2.2文献资料法
阅读、收集、整理有关航拍、数据分析方面的文献,为我们的实验提供理论基础。
1.2.3数理统计法
借助MATLAB 8.3和SPSS 19.0软件,对运动影像视频分析获得的数据利用概率分布及统计分析法确定起跳、落地点的位置。
2研究过程
2.1对小型航拍无人机系统的研究
2.1.1航拍无人机系统的组成
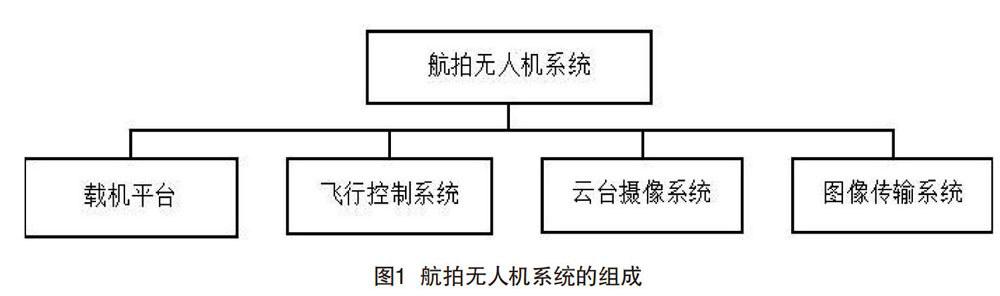
航拍无人机系统的组成如图1所示。
(l)载机平台。载机平台可以选择四旋翼无人机。相对于直升机飞行器,多旋翼飞行器具有机械结构简单、操作简便、稳定性高、噪声小等优点。长绳跑绳是一种在多数情况下于室内进行的运动,因此,采用简单得多(四)旋翼无人机是较为合适的选择。
(2)飞行控制系统。飞行控制系统由飞行控制器、姿态传感器和GPS定位系统组成,可实现飞行器姿态、航向、高度等参数的自动控制。在长绳跑绳的研究过程中,为了采集到整队的运动轨迹,需要从空中俯拍。
(3)云台摄像系统。为保证在安全距离下可以拍摄到清晰的图像资料,采用高精度数字增稳云台,为摄影、摄像设备提供稳定的拍摄平台。
由于实验基本在室内,因此受到外力影像因素较小,对于增稳系统的要求较低。但同时由于本身实验的范围较小,数据精度要求较高,对于搭载的摄像系统的像素及分辨率有一定的要求。此外,在考虑到室内光线问题的情况下,对于摄像系统的平角和广角有一定的选择。
(4)图像传输系统。地面操作人员可以利用蓝牙回传的实时画面,对采集到的影像、数据进行及时的调整,保证采集到的影像清晰,数据有效。
2.1.2航拍器的选择
在长绳跑绳运动中,整个队伍的跑动轨迹、实时队伍所处的位置和单个队员的位置都难以测绘,尤其由于空间视角改变引起比例尺的变化,更加增大测绘的难度。而航拍飞行器经地面操作人员控制,可以直接位于长绳静止时中点的正上方,并且不影响其日常训练。此外,在拍摄过程中,往往由于一些实际因素,航拍器在自动控制调节的同时,操作人员也可以根据传回的实时图像,通过手动操作使飞行器达到合适的范围区间内。
我们本次实验采用的航拍器为大疆4,应用的航拍软件为DJI GO。
2.2对长绳跑绳技术的研究
本次实验基于对航拍器的使用研究长绳跑绳运动。首先利用航拍器对运动轨迹进行研究,利用自动控制原理和模糊影像分析技术,分析图像各因素的权重,利用关系公式使航拍器达到最佳高度。在调到最佳位置之后,利用航拍记录实时影像(运动员轨迹)并存储。拍摄完成之后,通过数据分析,得出最佳的轨迹,并描绘出相应的点做成辅助练习器,运用到平常训练之中。经过一个训练周期以后,再次运用航拍,测出现在的实时影像,并与此周期以前采集的数据相对比,得出实验结论。实验流程如图2所示。
2.2.1进行航拍,得到首次采集的图像
航拍轨迹示意如图3所示,航拍器飞行位置示意如图4所示,此时飞行器处于中心点的正上方,并清晰地得出了一个较为整齐的类似“∞。”形状的运动轨迹。通过DJI GO的记录可知,此时飞行器距离地面高度为9.00 m。
为了使拍摄效果清晰,根据对称原理,航拍器的位置应正好位于长绳跑绳的中央,如图3所示。而飞行器的高度,则需要根据目标大小实现自我调节控制。
2.2.2对于图像进行模糊识别
将采集到的图像进行模糊识别,并手动确定我们需要的部分(本实验中以轨迹的长度作为衡量的首要因素),得出我们所需要的占空比(需要图形占整个空间的比例)等有关因素。这些有关因素将直接影响飞行器的高度和位置。
2.2.3代入关系公式,得出控制数据
根据抽象的几何图形进行适当建模,利用高度和视野大小的关系公式,考虑带来的误差,并计算权重。由抽象模型可得,高度(h)与占空比(t)的关系:h=b·t(6为航拍器摄像系统的自带系数)。
根据示意图所示,应有6个主要的影响角度。则[Sk,Sk]表示第k个角度的评判区间,则6个角度给出的评判区间构成了集值统计序列。根据各个角度的位置,以及影响大小,我们定义出各个角的权重系数h^(k=l,2,…,6),则加入权重系数后的评价指标为:
2.2.4利用相关数据,调整航拍器高度和视野
通过对影像数据的整理,我们得到目前的所有相关数据;通过对关系公式和权重的计算,得到控制数据。将两个数据进行对比,得出飞行器应该调整的高度为8.90m。
2.2.5利用得到的数据进行航拍
根据我们算出的数据,再次进行航拍。长绳队队员进行3 min的计时跑绳,我们控制无人机在长绳中心点上方、距地面9.00 m的位置静止,运用DJI GO软件,我们可以通过手机查看飞行器相机的实时画面并录制视频,同时实时查看相机参数,以进行航拍器位置的微调。
2.2.6分析视频,得到最佳路径及关键点
我们运用专业的视频分析软件coach- eye来分析录制的航拍视频。首先选取了速度较快且动作标准的5次进绳出绳动作,在图中标记了他们的起跳点落地点及跑绳路径,如图5-6所示。之后我们运用视频分析软件,建立了平面直角坐标系,确定比例尺(由于比赛规定两摇绳者之间距离不能小于3.6 m,故在队员训练时两摇绳者之间的距离始终固定为3.6 m),进行数据采集。
得到多组路径及关键点之后,我们算出了平均值,即可以提高跑绳速度的最佳的数据,如表l所示。数据在轨迹图中的体现如图7所示。
2.2.7将最佳数据运用到队员日常训练中
我们将得出的数据应用到长绳队新队员的训练当中,规范他们的动作,并根据队员的反馈微调了我们的数据。队员训练频率为每周3次,每次一小时。我们记录了新队员在整个训练周期内的长绳个数,如图8所示。
从图中曲线走势可以看出,新队员的跑绳水平有了明显的提高。
2.2.8将再次航拍所得数据与最佳数据比对
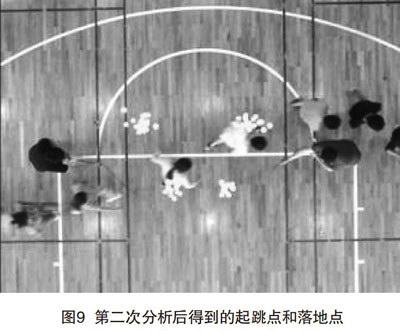
训练两个月之后,我们再次进行航拍,来验证新队员通过规范了技术动作而达到了提高跑绳技术的目的。长绳队队员仍然进行3 min的计时跑绳,我们控制无人机并录制视频,同时实时查看相机参数,以进行航拍器位置的微调。
通过coach- eye视频软件分析后,结果如图9-10所示。建坐標系分析后,两次所得数据如表2所示。
对跑绳运动中的di设置条件阈值D,xi设置条件阈值为X,通过历史经验分析得出D=1.31,X=5.32;在本次试验中,差值明显在阈值的范围之内,故可以得出跳绳队员的轨迹已经趋近于最佳状态。
3结语
在实验中,我们通过航拍得到优秀队员的跑绳路径及关键点的数据,将这些数据应用在辅助练习器上以规范长绳队队员的动作。但是这种方法虽然有效,却不能直观地使队员发现他们动作上的不足。
理想状态下,我们可以进行运动技术诊断的方法。长绳队日常训练时,可使用航拍器录制视频,并有软件自动分析,若发现队员没有踩到标准的起跳点落地点,或是实时路径与标准路径相距过大时,便发出警报。队员可回看视频,找出动作缺陷。也可以单独测评一名队员的动作,对其进行打分,帮助队员改善动作。
此外,在未来无人机技术的发展中,可以运用多个无人机组成一套测量摄像体系,从而精准地得出目标对象的三维运动图像,为研究目标对象的运动方式、姿态,提供更精准的依据。
[参考文献]
[1]逯曦,任晓毓,张华明,等.无人机航拍技术在雷电防护中的应用[J]气象科技,2015 (6):1176-1180
[2]韩露.基于航拍图像的目标检测系统设计与实现[D]北京:北京理工大学,2015
[3]陈智.浅议无人机航拍的应用[J]时代金融,2014 (15):210-211.
[4]李晓龙,张兆翔.深度学习在航拍场景分类中的应用[J]计算机科学与探索,2014 (3):305-312
猜你喜欢
装备制造技术(2021年4期)2021-08-05
电子测试(2018年6期)2018-05-09
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
铁道通信信号(2016年12期)2016-06-01