多传感器信息融合在机器人技术中的应用
2018-06-17 11:16孙晓莉
无线互联科技 2018年2期
关键词:信息融合
孙晓莉

摘 要:文章论述了多传感器信息融合的特点及并对其融合方法进行了介绍,最后指出多传感器信息融合技术在移动机器人和遥控操作机器等方面的应用与发展。
关键词:多传感器;机器人技术;信息融合
机器人技术是结合了多种技术的计算机自动控制系统。机器人有类似人的感觉能力和反应能力,能模仿人的听觉、嗅觉、味觉从外界获取信息。同时,它的动作要有一定的灵活性,能够和人类一样思考,在工作时必须完成自我控制和自我调节。在众多机器人控制技术中,传感器技术在机器人的控制中起到了至关重要的作用。传感器及信息融合技术式机器人能够全面获取外界信息,并对这些信息加以压分析判断,从而做出正确的反应。机器人在感知外界环境时,首先要完成信息采集工作,而这项工作正是传感器完成的。另外,传感器采集到的信息量非常巨大,因此,要对多个传感器获取的各种环境信息进行加工和处理,选择恰当的方法和技术才能使机器人按人们既定的要求进行智能作业[1],甚至完成人类不能完成的一些特殊任务。综上所述,传感器信息融合系统是现代智能机器人的重要组成部分,是机器人能否智能作业的关键所在。
1 多传感器信息融合技术
机器人是通过传感器得到感觉信息的。在连接外界环境与机器人的技术中,传感器起桥梁作用,它就如同机器人的眼睛,是机器人获取环境信息的窗口。机器人的关键之一是计算机控制技术,这种技术使机器人具备了类似人的肢体活动能力和思维能力,它的肢体动作灵活,能够像人类一样思考,能够在无人操作的情况下独立完成工作[1]。而机器人之所以能够完成各种高难度的动作,传感器的应用是关键因素之一。传感器先完成信息采集,再将信息进行综合处理,计算机自动控制系统最后完成对机器人各种动作的控制。传感器信息融合技术又称数据融合技术。传感器要像人类的神经和感官一样获取各种宏观和微观信息,再将信息提供给计算机控制系统。信息融合技术将获取的信息先做处理、再选择合理的表示方法,并要找出个信息之间的联系。这种技术是一种信息优化技术,它从不同角度对信息进行处理及比较,获取不同信息之间的普遍规律,筛选出错误的和多余的信息,留下正确的和有用的部分,这就是信息的优化。它也为智能信息处理研究指出了新的发展方向。单一传感器获取的环境信息是缺乏准确性和全面性,因此,信息的采集必须由多个传感器合作完成。将多种传感器获取的信息进行合成,才能完整、准确、客观地刻画外界环境的特点,也是多种信息综合前预处理。通过信息融合技术处理后的信息具备了冗余性、互补性、实时性、信息获取低成本性等特征。
2 多传感器信息融合过程
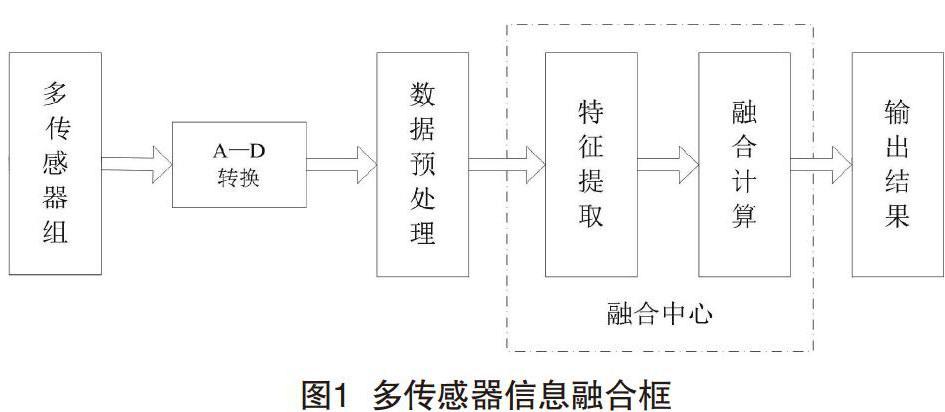
多传感融合系统是一个复杂的信息系。各类传感器获取的信息都有各自的特点。这些信息有实时信号、非实时信号、快变或瞬变信号、缓慢变化的信号;确定的信号,模糊变化的信号[2]。这些大量的信息之间还有可能会相互制约,相互影响。多传感器信息融合扮演了人类大脑的角色,它使用该系统中的各种传感器资源,通过一定的算法合理地支配与使用多个传感器获取的信息。对时域和空间上的冗余信息和互补信息优化组合之后,也就完成了环境信息的更为精确的、全面的提取和描述。信息融合是对多种传感器信息在几个层次上进行处理的过程,每个层次都代表了不同等级的信息抽象过程。信息融合处理技术涵盖了信号探测、信号互联、信号相关、信号估计等。信息融合系统也可分为两个层。即较低层是信号的特征提取和身份估计层。较高层次是整体战略走向和战术态势估计。典型的多传感器信息融合的组成框如图1所示。
3 信息融合的分类和方法
传感器信息融合技术可以分为信息组合、信息综合、信息融合、信息相关等4个方面。信息组合是最基本的数据处理方式;为了获取全面、准确的信息,可以选择多传感器平行输出或互补输出的方式。由于不同传感器输出方式有所不同,这就存在多种传感器输出方式的相互合作、综合以及如何选择性能优良的传感器的问题。这几个技术中的关键是综合,综合可以使信息明确化、准确化的等级提高。比如我们要对一个物体摄像,可以使用摄像机多次拍摄同一个物体的不同侧面的图像,再将这几幅图像的信息进行综合处理,就能得到一个非常非常真实的、有立体感的物体图片[2]。这要比单一图片所表现出的物体的特征信息全面丰富得多。融合包括两个方面:对传感器输出的各种数据进行相关;将传感器数据与系统内部的已有的网络模型进行相关。最后将相关的结果进行处理,生成一个新的信息表达式。信息相关处理的目的是对识别、预测、学习和记忆等过程进行综合和优化处理。获取传感器数据组之间的相互联系规律,保留正确的信息,剔除无用和错误的信息,直到机器人做出相应的判断和反应。信息融合的层次化描述存在于各种实际环境中。融合处理方法就是数学加工和处理,使这些信息称为计算机自动控制系统能够处理的成分信息,同时完成信息数据的融合。能够应用于多传感器信息融合的数学理论和方法有很多。常用的方法是数理统计和概率理论以及构建人工神经智能网络。概率统计方法主要是针对信息的不确定性进行研究,从大量的看似没有规律的信息中找出各种信息之间的内在联系。与概率统计有关的理论包括估计理论、卡尔曼滤波、假设检验、贝叶斯方法、统计决策理论以及其他函数变形方法;人工智能包括模糊逻辑处理学、人工神经网络模型和专家系统等。此外,近10年来,研究者已经将自适应共振理论《Adaptive Resonance Theory, ART),自適应共振理论映射(Adaptive Resonance Theory Map,ARTMAP)和模糊自适应共振理论网络( fuzzy-ART network)也应用于传感器融合技术。这几种新理论使融合之后的信息特征值能自动调整权值,并且能够零点漂移以及灵敏度漂移影响,环境温度变化时也能保持稳定的输出。
4 信息融合的结构
信息融合的结构的结构分为串联、并联和混联3种,如图2所示。
5 多信息融合的典型应用
信息融合技术已经广泛应用在机器人技术中。由于移动机器人和遥控操作机器人的工作环境不是静态的,包含很多不确定因素,结构特征也不明显,所以他们是最先采用信息融合技术的机器人。此种技术是机器人具备了极高的自我管理能力和感知能力。同时还可以使机器人准确判断实时自身条件,指导其身体作出正确的肢体动作。通过大量实验汪明,采用单一传感器机器人和使用多传感器的机器人在感知外部环境的能力方面是不可比拟的。
RANGER是卡内基梅隆大学机器人研究所在90年代中期研究的一种可移动机器人。该研究所认为一幅图像最重要的是图像处理过程,并不是确定一个标准的图像模型。特别在比较粗糙的地方,不同图像的特征的变化很大,数学计算相当复杂,且计算量非常庞大,这就更需信息融合技术来确保特征模型的可靠性[3],也为机器人的安全性提供了保障。
LIAS是德莱克西尔大学研发的多传感器移动式机器人。该机器人装有3个不同的感觉系统。它的四周安装了超声波传感器,前方安装了一个特殊的“三听觉”传感器;机器人前面板突出的部分安装了红外线传感器,这些传感器能够采集到完整的全景信息。这种机器人可以一次探测很多目标物体,输出多种距离信息。例如测量被测物体相对于机器人的方向和距离等信息。在这项研究中,学者们从不同的角度对现有的信息融合方法加以应用,验证了它的实用性和有效性[4]。
6结语
近些年来,传感器及检测技术的进步带动了机器人技术日新月异的发展。而信息融合技术使人工智能领域得到了深入的关注和广泛的应用。其理论和方法是智能信息处理的关键所在。本文概述了多种传感器信息融合的方法、过程、结构等。在此基础上,论述了信息融合技术在传感器技术、计算机技术、智能控制技术,等方面的应用,展望了这一研究领域的发展方向。
[参考文献]
[1]罗志增,蒋静坪.机器人感觉与多信息融合[M]北京:机械工业出版社,2003.
[2]李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J]机器人,2002(5):475-480.
[3]柳成林.智能機器人的发展及其产业化[J].科技导报,1998 (6):33-36
[4]蔡自兴.中国的智能机器人研究[J]莆田学院学报,2002 (3):36-39
猜你喜欢
现代电子技术(2017年3期)2017-03-04
科技资讯(2016年28期)2017-02-28
计算机应用(2016年12期)2017-01-13
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
湖南大学学报·自然科学版(2015年8期)2015-09-06
湖南大学学报·自然科学版(2015年2期)2015-04-20
现代电子技术(2015年1期)2015-04-13