
基于STM32的智能净化控制系统设计*
2018-06-14 03:42:10韩竺秦张丽娜
电气传动自动化 2018年3期
韩竺秦,张丽娜
(1.韶关学院自动化系,广东韶关512005;2.韶关学院教育学院数字媒体专业,广东韶关512126)
1 引言
随着国家社会经济和生活水平的不断提高,人们对高质量的生活方式越来越向往,对空气质量和身边环境的要求也逐渐提高,本文设计研发了智能净化控制系统[1][2]。主要由微控制器STM32、监控终端、温湿度传感器与实时数据采集系、PM2.5粉尘传感器数据的处理,清洁电机控制,清洁净化机器人移动电机的控制,主要包括两部分,控制空气净化器以及清洁扫地功能,同时可以将系统参数通过WIFI上传到终端,终端上位机接收到信息,可以对整个系统进行远程监控[3]。
主要功能:
(1)对特定环境下温度、湿度、红外避障、PM2.5粉尘传感器等信息进行实时采集。
(2)利用WIFI模块连接终端系统,通过终端APP对清洁净化机器人进行,远程开机关机,风速等控制,在不同环境可进行 5 挡调速[3]。
(3)通过液晶屏对温度,湿度,甲醛等信息进行实时显示,并通过WiFi对相关的信息实时监测。
2 控制系统功能分析
系统在工作时,控制器STM32负责协调机器人整体工作任务,通过终端提供人机交互信息,包括所有传感器的信息接收和处理。净化控制系统整体设计框架如图1所示,该系统主要包括STM32主控制器,甲醛、温湿度、PM2.5等光电传感器,人机交互系统,WiFi模块,静电吸附模块,驱动模块,步进电机等部分组成。当甲醛气体浓度或PM2.5浓度超过用户所设定的阀值时,清洁净化机器人能够自动从睡眠状态被唤醒,启动风扇,将有害气体或者空气抽入该设备之内,抽入的空气在排入或排除时,当空气经过过滤网时,较大颗粒或者大部分被吸附在过滤网上,排出PM2.5和甲醛浓度低的空气。
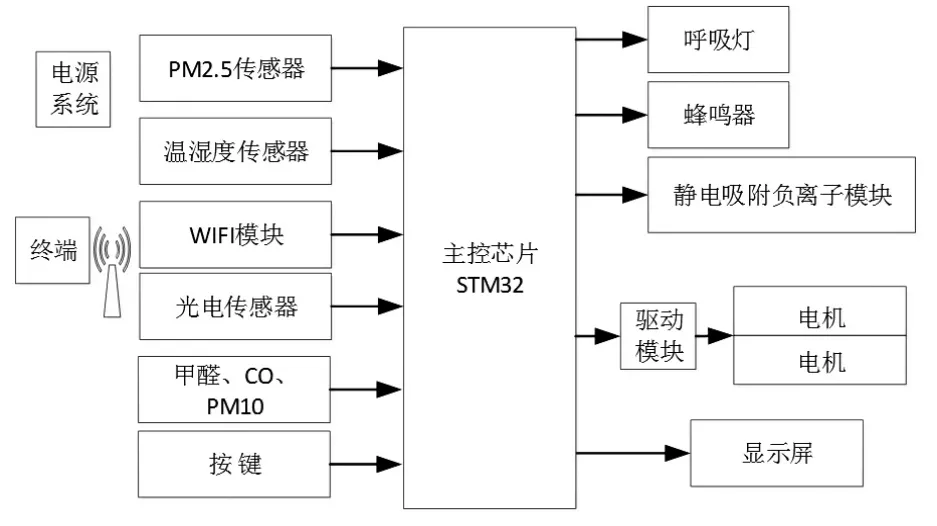
图1 净化控制系统整体设计框架
系统中除了正常需要的过滤网,它的风扇选用了高速冷凝风扇,风力强是一个特点,还有一个是比较安静,能够在净化空气的时候给人一种安静舒适的环境[4]。
3 净化控制系统功能实现与电路设计
3.1 数据采集功能
依据功能分析,数据采集任务由PM2.5、甲醛气体传感器,光电传感器以及温湿度传感器组成来完成。不同的气体传感器在空气中接触到不同的污染源会后产生相应不同的信号,经基于STM32系统构成的数据采集系统采集和数据解算处理,可以得到各个污染气体的浓度值。以此为依据来评判给出空气质量等级,并采取预定的处理策略进行净化处理。
3.2 净化模式
(1)自动运行模式,净化模式下进行自动运行,根据检测的参数分析对电机进行无级速度调节。
(2)手动运行模式,系统根据污染指数大小可以手动调节按钮来改变电机转速,可进行5级调速;
(3)睡眠模式运行,当系统检测到空气指数达到要求指标。系统就自动进入睡眠模式,电机工作在功率最低状态,
3.3 硬件电路设计
3.3.1 stm32f030c8t6 的最小系统设计
最小系统是STM32能够正常工作的基础,是硬件和软件能工作的基本环境,其一般包括晶振电路、复位电路以及电源电路等[5]。如图2所示stm32f030c8t6最小系统。
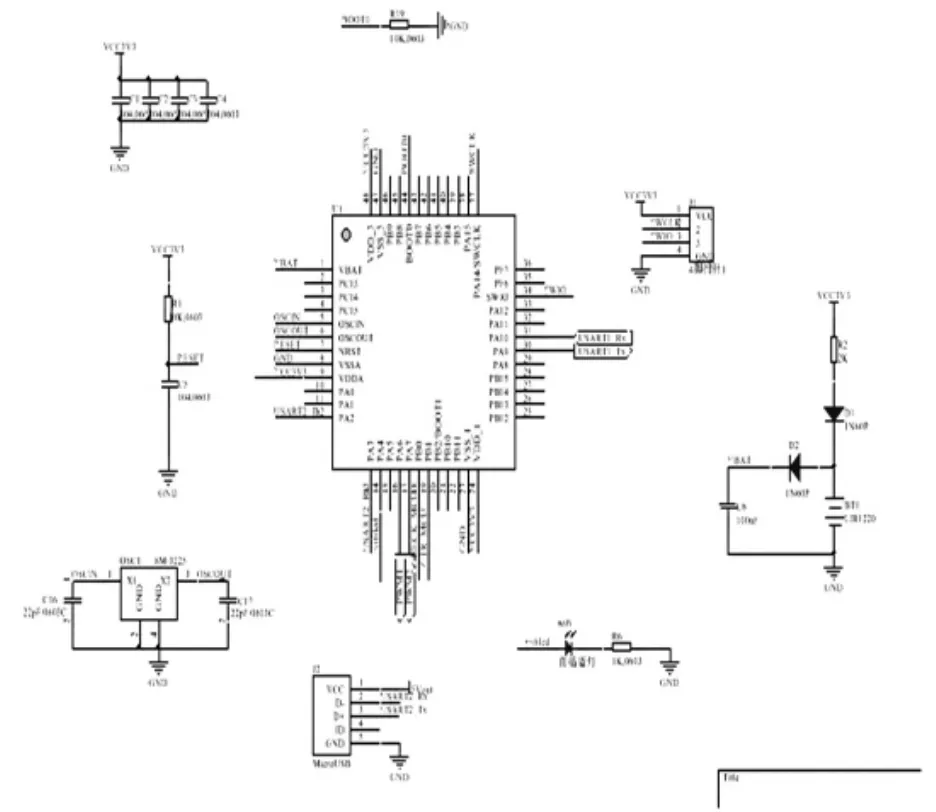
图2 stm32f030c8t6最小系统
3.3.2 电源电路设计
该设计是12V供电电路,12V电压是通过适配器提供的,由于该设计的气体检测仪需要5V供电,选出常用降压稳压芯片TPS5410,该芯片的输入电压限度在5.5V-36V,而输出电压范围为1.22V-35V,芯片的内部自动运转振荡器,PWM的开关频率在500KHZ。
输入电压范围,输出电压,输入纹波电压,输出纹波电压,输入电流范围,工作频率。设计参数给出如下表1所示:
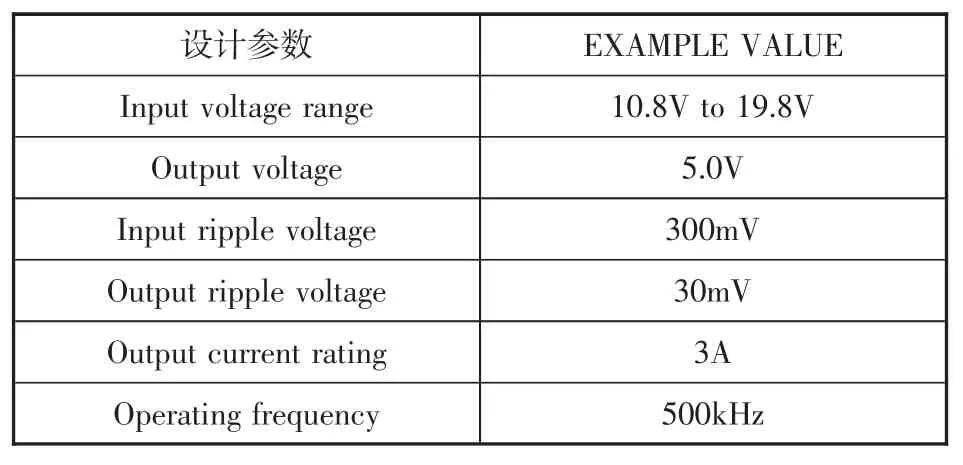
表1 电源设计参数
TPS5410型号的芯片要添加去耦电容,使用较大的输入电容。电容一般用C1=10μF,需要高品质的瓷介电容,电容的耐压值必须高于最高输入的电压,最好耐压值应该在输入电压值两倍左右,容量需避免输入电压和电流的纹波的超出,因此电容的耐压值需要高于最高的输入电压。
输入电压的纹波可以按照以下计算

IOUT(MAX)是最大负载电流,ESRMAX是输入电容最大地等效串联电阻,CIN则是输入电容,fSW是开关频率。
最大的纹波电流是很有必要检测的,根据最坏的情况以下计算:

另外,也能够加一些较大容量的电容,特别是TPS5410型号的电路板电源芯片的位置距离CIN多于2英寸时,需要最大输入纹波电压和纹波电流都能够接受。芯片TPS5410输出的电压是由外部电阻R1和R2分压来得到的,根据使能端电压计算。选定R1,然后计算R2,推荐R1为10K电阻。

想要输出 VOUT=5V,则计算出来的 R2=3.24KΩ。TPS5410 稳压电路如图3所示:
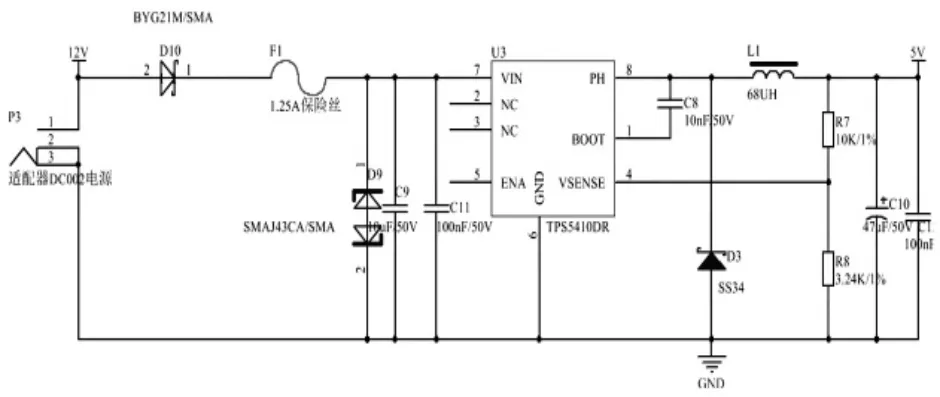
图3 TPS5410稳压电路
设计中3.3V电压作为微控制器STM32和ESP8266的电源电压,选用SP6203EM5-3.3V稳压器,电路图如图4所示,将TPS5410输出的5V电压转化为3.3V稳定输出。SP6203具备十分低的压差和接地电流,而且噪声非常小,极其稳定且容易使用。

图4 SP6203EM5-3.3V 稳压电路
3.3.3 防反接电路设计
该设计用BYG21M/SMA二极管防止倒灌,用SMAJ43CA/SMA双向二极管防止电源正负极反接,利用二极管的单向导电性,在正极串联一个防反接二极管能够避免因光伏组件正负极反接而使电流反灌电路进而毁坏电路;为避免光伏组件的方阵里的支路之间存有压差致使电流倒送,这就是所谓的环流;当所在组串存在时,这里当做一个断开点,把系统有效地分隔开,在保护故障组串的同时,也为检测修理提供很多便利。
3.3.4 电机驱动电路设计
该设计电机用不同占空比的PWM来控制,关于PWM电机变速的电机电路,主要有下列性能标准。
(1)看输出的电流和电压的限度,它决定着这个电机电路有怎样的驱动能力,可以启动多少功率的电机。
(2)较高的效率不但表明了电路能够很好地节约电源,同样的也可以降低电路板地发热度。想要提升电路的性能,我们可以从功率元件入手,看它的运行状态,尽量避免同时导通。
(3)功率电路对于输入端需要有较好地信号隔绝,避免有大电压和大电流进入主芯片进而损坏芯片,光耦是一个很不错的选择,在隔离方面起到了很好的作用。
(4)共态导通能够引发电源的电压瞬时降低形成高频电源污染。
图5为是电机驱动电路,PWM波形在芯片IO输出,加个限流电阻后经过光电耦合器,在三极管端加一个10k限流电阻,一个100k的下拉电阻,一个稳压二极管,然后是功率NMOS管,电机的两端要反向并联一个续流二极管,保证了电路其他元件的安全。
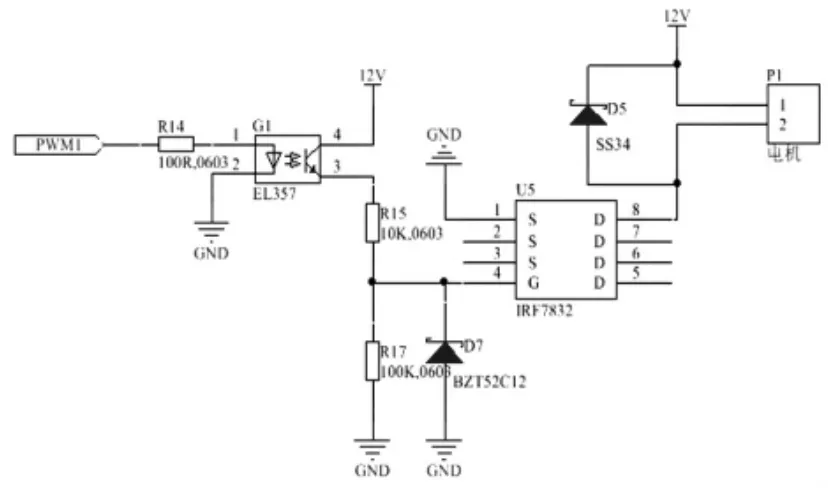
图5 电机驱动电路
4 软件设计
4.1 程序总体结构简述及框图
本文设计的净化控制系统,是以STM32为核心来控制整个系统运行,包括对电机、行走机构、负离子、传感器数据的采集,按键输入,终端APP以及人机交互界面的控制和通信,系统的软件模块框架如图所示,控制程序流程图如图6所示,系统上电后,主程序开始执行,主程序的流程框图如图7所示,先对整个控制系统进行初始化,然后进入主循环控制程序,进行WiFi等待配置,通过APP控制处理。
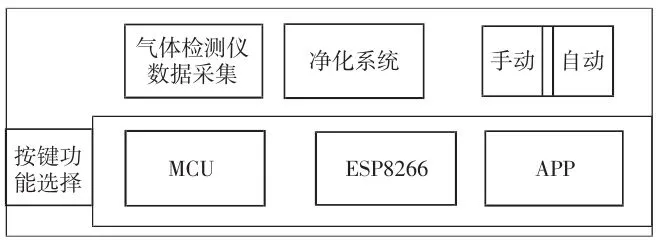
图6 程序总体结构框图
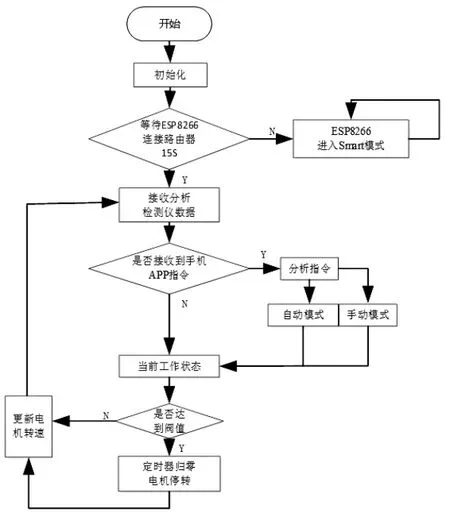
图7 主程序工作流程图
4.2 wifi通信程序设计
按ESP8266开机初始化函数:ESP8266上电之后会配置到上次断电前的状态,为下次开机时设备自动连接到路由器所以给以ESP8266一定时间的初始化等待。Smart模式下客户能很方便的为设备配置路由器名称及密码。
4.3 APP功能设计与实现
该设计的APP主要有两个操作界面手动模式界面和自动模式界面,手动模式界面可以直接控制风扇的开关和风速。自动模式界面相对复杂些,需要设置三个数值(甲醛浓度,PM2.5浓度,定时的时间),设置完毕后,App再根据空气净化器发送的数据反馈开启关闭和电机风速的指令。
APP界面的设计包括了自动模式,手动以及定时,其设计界面如图8所示。

图8 APP界面设计
①手动模式界面如图8所示左侧,有进风和出风两个标题,他们的右边都是五个按钮,当按第一个按钮是,APP发送JHSM1000的数据,风扇风力为第一档,当按第二个按钮是,APP发送JHSM2000的数据,风扇风力为第二档,其他的以此类推,这便是APP的手动模式设置。
②自动模式界面如图8所示右侧,空气净化器通过ESP8266无线wifi发送检测的数据给移动设备端,移动设备接收到将数据反馈到 APP界面(如PM2.5、甲醛、温度、湿度等),自动模式界面下半部有三条线,可以设置浓度的阀值和空气净化器运行的时间,当设置完后,当空气净化器测试数据达到阀值时,移动设备端就会发送一串运行指令,空气净化器就会启动。
5 实验结果
系统上电后,显示器正常显示各项参数,风机正常运转,在自动模式下进行测试实验界面显示情况如图9所示,PM2.5 显示为 119ug/m3,甲醛 0.042ug/m3。

图9 系统测试界面
空气质量评价为中度污染,主要污染气体为PM2.5。由于当前空气质量差,电机处于中速运行,为测试需要,净化器工作于自动模式下,人为制造了高浓度PM2.5的环境半封闭环境。点燃一支烟,并将其放在进风口电机,120S之后将其熄灭,一分钟记录一次数值并进行读取,记录到40分钟空气质量达到优且该值的波动达到平稳。
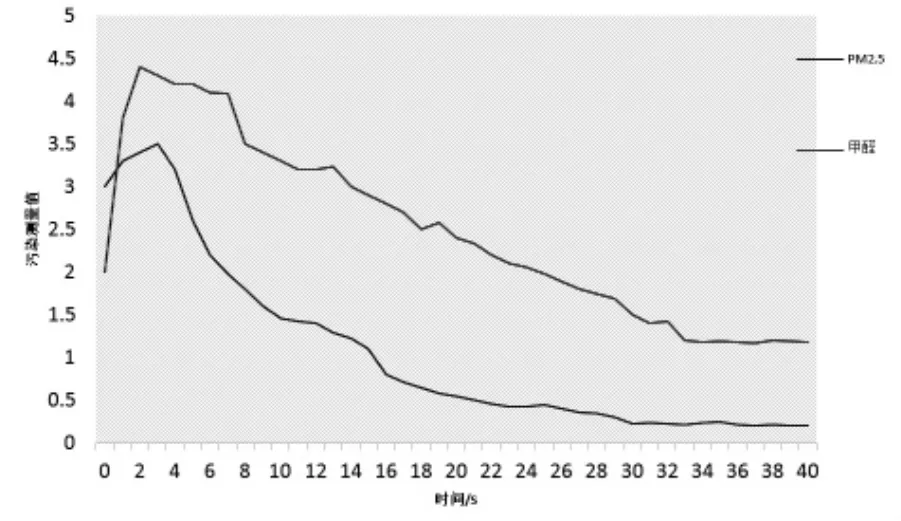
图10 实际测量曲线图
采用曲线拟合方式绘制出曲线图,由下图可知,一开始空气污染数值迅速增加,香烟熄灭之后,数值开始下降,并在一定的范围内起伏变化,整体呈现下降趋势,半个小时之后基本趋于稳定,该设计能够实现预期效果。
6 结论
针对家庭和办公室的空气清新,研制出一套基于STM32的智能清洁控制系统,该系统能实现室内粉尘浓度远程监控,提高室内清洁效果,系统具有良好的适应性。实验表明该系统运行稳定,净化效率高。
猜你喜欢
当代陕西(2020年13期)2020-08-24 08:22:02
光源与照明(2019年4期)2019-05-20 09:18:18
当代水产(2019年3期)2019-05-14 05:42:48
制造技术与机床(2017年5期)2018-01-19 02:49:17
Coco薇(2017年7期)2017-07-21 16:49:50
电镀与环保(2016年3期)2017-01-20 08:15:32
潍坊学院学报(2016年2期)2016-12-01 13:00:11
金色年华(2016年23期)2016-06-15 20:28:28
电子器件(2015年5期)2015-12-29 08:43:41
电源技术(2015年1期)2015-08-22 11:16:26
