
基于WirelessHART的半密闭船舱人员定位系统设计
2018-06-14 07:15:20杨国良
软件 2018年5期
杨国良
(上海理工大学 光电信息与计算机工程学院,上海 200093)
0 引言
装有货物的半密闭船舱内部环境十分恶劣,建立用于半密闭船舱的人员定位系统,对于预防事故的发生与人员的搜救都有着极为重要的意义。类似于船舱等特殊的工作场景,因其结构复杂,信号传输率低等特点,目前没有一个很好的定位解决方案。因此,设计一套定位精准,低功耗,可靠传输的人员定位系统意义重大。
本文将DecaWave公司的DWM1000模块集成到WirelessHART网络中。采用最新的UWB技术,利用脉冲信号到达的时间差来测量节点间的距离,进而对节点进行定位。相对于其他的一些无线通信技术而言,UWB有着发射功率较低,传输速率块,穿透能力强并且是基于极窄脉冲的无线技术,无载波等优点[1]。结合WirelessHART网络的低功耗和可靠的良好特性,该系统能很好地部署在半密闭船舱的环境中并完成工作人员的定位。
1 W irelessHART技术
WirelessHART(Wireless Highway Addressable Remote Transducer)是HART通讯基金会为工业过程控制研制的一个开放标准的无线网络技术,也是第一个用于过程控制的国际无线标准(IEC 62591),支持 IEEE 802.15.4标准的 2.4GHz ISM 频段[2]。WirelessHART是一种具有时钟同步、自组织和可治愈的网状网络结构,拥有低成本、低功耗、高可靠性等优点,其能够快速兼容现有有线设备工具和系统[3]。WirelessHARTTM技术进一步促进了无线技术在工业自动化领域的广泛应用[4]。
2 定位系统的整体框架
系统的构架如图1所示,定位系统由硬件平台与上位机软件组成。硬件系统是由网关,基站和标签节点三部分组成。网关通过以太网接收上位机发送来的命令,进行WirelessHART网络的组网,初始化设置以及对该网络区域中的各个节点进行时钟同步与管理。基站节点主要负责对 UWB脉冲信号TOA数据进行采集与传输,将WirelessHART网络中的数据传送给网关,网关将接收到的数据发送到上位机。上位机软件负责处理TOA数据,调用定位算法将标签的位置以图形化和坐标的形式显示。

图1 系统框架Fig.1 Sy stem framework
3 系统设计与实现
3.1 WirelessHART网络部署
WirelessHART网络节点集成DecaWave公司开发的DW1000芯片,其兼容IEEE802.15.4-2011协议的超宽带无线收发芯,在实时定位系统中用于物体的定位,精度高达厘米级别[5]。本系统中一个定位区域内部署1个网关和4个锚节点以及一个标签节点。网关负责网络的组网细节。锚节点是坐标位置已知的固定节点,它的存在是为了给移动的标签节点计算坐标提供数据支持的。标签节点则是船舱工作者随身携带的移动节点,其位置通过调用定位算法得出。节点部署完成后,网关会和定位区域中的各个锚节点通信,完成网络的初始化和组网工作。
3.2 克拉美罗下界
克拉美罗下界(Cramer-Rao Lower Bound, CRLB)是TOA估计算法在理论上的一个界限值[6],文献[7-8]对于单一路径的加性高斯白噪声信道,通过数学理论证明从 TOA估计中获取的能够实现的最佳精度的距离估计满足下列不等式

(1)式中,C为光速,SNR为信道信噪比,β为有效信号带宽,其定义为:
其中,S(f)为发送信号的傅里叶变换。
由(1)(2)两式可以得出,提高信噪比或者加大有效带宽都可以有效的提高TOA估计的精度,由于UWB具有相当大的带宽,所以基于TOA的定位技术可以充分利用 UWB高带宽的特性实现精准可靠的定位。
3.3 DS 测距(Double-sided Two-way Ranging)
标签节点和锚节点间距离的测量是 TOA定位技术的关键,与单边测距相比,双边测距在单边测距的基础上再增加一次通讯,两次通讯的时间可以互相弥补因为时钟偏移引入的误差[9],其中测距过程如图2所示。

图2 DS 测距示意图Fig.2 DS range mapping
标签节点首先向锚节点发送POLL数据包,并记下发送时间T1,并在一段时间后打开RX。锚节点要提前打开接收,收到POLL数据包后,记录时间 T2。锚节点在 T3(T3=T2+Treply1)时刻发送Response数据包,发送完成之后打开 RX。标签节点收到 Response数据包,记录时间 T4,并在T5(T5=T4+ Treply2)发送Final数据包。锚节点收到Final数据包后,记录时刻 T6。根据 6个时刻值可以推出一次双边通信中电磁波的飞行时间Tprop为

其中Tround1 = T4 - T1 Tround2 = T6 - T3 Treply1 = T3 - T2 Treply2 = T5 - T4
Tprop乘以光速则为标签节点到锚节点两者之间的距离。标签移动节点测量获得到其与网络中各个锚节点的距离后,将此数据经由网关传送给上位机,上位机调用定位算法则可以计算出标签节点的位置。
3.4 极大似然估计法
TOA定位技术根据是信号到达时间差为理论基础完成定位的。在立体空间中需要四个固定基站,在二维平面则需要三个基站。当发射信号从标签节点到基站的时间为t,那么时间t乘以电磁波的传播速度可以得到标签节点到参考基站的距离,同理,可以获得此标签节点与其他基站的距离。以两者的距离为半径做圆,由几何知识可知,三个圆的交点为标签节点的实际位置[10]。原理如图3所示。
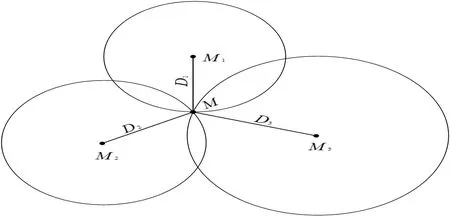
图3 二维空间TOA定位原理图Fig.3 T wo-dimensional space TOA positioning principle diagram
假设移动标签节点得到其与三个以上并且不位于同一直线的基站节点之间的距离时,
极大似然估计算法的基本思想可以描述为:
当有n个参考节点1, 2, 3…n,设它们的坐标分别为(x1,y1),(x2,y2),(x3,y3)…(xn,yn),位置未知的标签节点为 M,其坐标为(x,y),标签节点 M到各个锚节点的距离分别为d1,d2,d3…dn,则有

将方程组(4)整理成AX=b的形式,其中
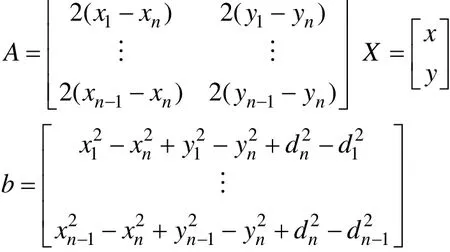
通过最大似然估计方法,可以得到标签节点M的坐标位置(x,y)[11]:

3.5 上位机软件设计
上位机软件系统是基于 C++语言开发。按其功能可以分为数据获取、定位计算和图形界面显示层三部分。数据获取层完成与网关的通信,通过以太网将标签节点与每个基站之间的距离传送给上位机。定位计算层对获取的数据进行处理,调用定位算法对标签节点的位置进行定位。图形界面提供定位显示界面,支持地图导入模式,将标签节点的位置实时的显示在地图上。
4 实验设计与数据分析
4.1 实验设计
本实验以学校工科实验室为实验场所进行测试。该实验室长10.4米,宽7.2米。实验室有各种实验仪器仪表,多张试验台,工作环境比较复杂,可以比较贴近的模拟船舱内的工作环境。实验将 4个基站节点分别放在实验室的四个角的位置,网关安放在任意的的试验台上。实验人员手持标签节点围绕试验台随机的移动。从上位机软件可以观察到操作人员的移动轨迹。定位结束后,上位机软件会自动的保存标签节点在对应时间点的位置坐标,从而达到定位跟踪的作用。
4.2 实验数据分析
基站节点的实际位置如下表1所示。
随机的在实验区域选取 5个点作为定位测试点,每个点均测试10次取其平均值作为实验值。具体的实验结果见下表2。
通过实验数据可以看出该定位系统在随机的 5个测试点中,定位最精准的测量误差为 8.6 cm,最大的定位误差仅为14.5 cm,平均误差为10.96 cm。相比于Zigbee,Wifi与RFID等传统的定位模式,结合WirelessHART与UWB的定位系统具有更高的定位精度。本文的实验场景的选择具有一定的代表性,实验定位也有着较高的精度,所以该方案具有一定的实用性。
5 结论

图4 上位机软件界面Fig.4 Host computer software interface

表1 实际位置坐标Tab.1 Actual position coordinates
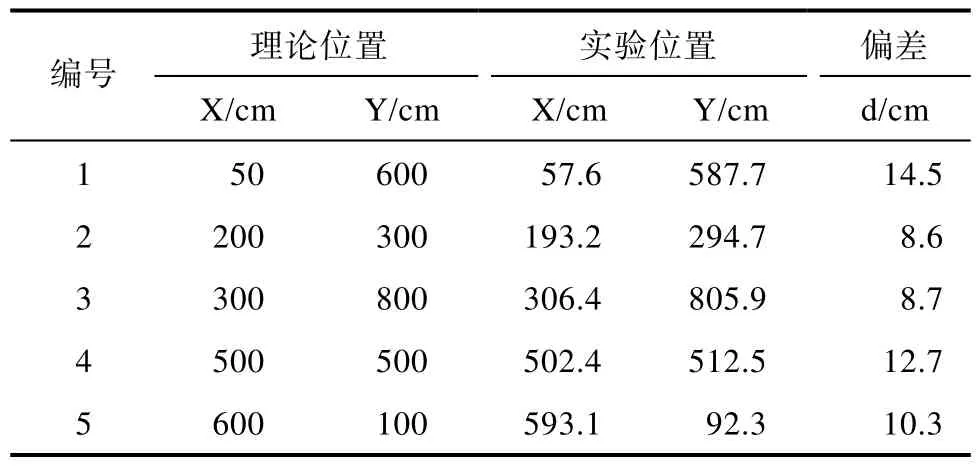
表2 实验位置坐标Tab.2 Expe rimental position coordinates
本文研究并设计了一套适用于半密闭船舱等特殊场景的定位系统。该系统完成了 WirelessHART与DWM1000模块的集成,利用UWB与DS测距技术实现了TOA数据的采集,通过WirelessHART网络的传输与极大似然估计算法完成了比较精确的定位。实验结果显示该定位系统可以部署在实际的应用场景,并且定位精度可以达到10 cm以内。本实验仅在定位系统中只存在单个标签的环境下进行,当有多个移动标签加入网络时避免标签彼此之间的干扰同时达到更高的定位精度是下一步的研究工作。
[1] 曹福成, 王树勋, 孙晓颖. 基于子空间的DS-UWB系统高分辨率低复杂度时延估计[J]. 吉林大学学报(工学版),2008, 38(2): 471-475.
[2] 彭瑜. 无线HART协议— 一种真正意义上的工业无线短程网 协议的概述和比较[J]. 仪器仪表标准化与计量, 2007. 5:31-37.
[3] HART Network Management Specification (HCF_SPEC -085,Revision 1.0)[S]. 2007. 4.
[4] Le-Trung Q, Taherkordi A, Skeie T, Pham H N, Engelstad P E. Information Storage, Reduction and Dissemination in Sensor Networks: A Survey [C]. IEEE Consumer Communications and Networking Conference, 2009: 1-6.
[5] 王保云, 物联网技术研究综述[J]. 电子测量与仪器学报,2009, 23(12): 1-7.
[6] Aftanas M, Rovnakova J, Drutarovsky M, et al. Efficient method of TOA estimation for through wall imaging by UWB radar[A]. Proc. of International Conference on Ultra-Wideband, ICUWB' 08[C]. Hannover, Germany, 2008,2. 101104.
[7] Alavi B, Pahlavan K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements[J].IEEE Communications Letters, 2006, 10(4): 275-277.
[8] 吴绍华, 张乃通. 基于UWB的无线传感器网络中的两步TOA估计法[J]. 软件学报. 2007, 18(5): 1164-1172.
[9] 贺晶晶, 姜平, 冯晓荣. 基于UWB的无人运输车的导 20航定位算法研究[J]. 电子测量与仪器学报, 2016, 30(11):17431749.
[10] 张月霞, 陶小峰, 张平. 超宽带通信系统加权移动三角形到达时间精确定位算法[J]. 吉林大学学报: 工学版, 2010,40(1): 266-270.
[11] Roy S, Foerster J R, Somayazulu V S. Ultrawideband radio design: The promise of high-speed short-range wireless connectivity[J]. IEEE Proceedings, 2004, 92(2): 295-311.
猜你喜欢
成都信息工程大学学报(2020年5期)2020-07-29 08:50:22
网络安全和信息化(2018年4期)2018-11-09 12:01:54
车迷(2018年12期)2018-07-26 00:42:22
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
移动通信(2015年18期)2015-08-24 07:45:08
学习月刊(2015年3期)2015-07-09 03:51:04
太阳能(2015年7期)2015-04-12 06:49:50
中国新通信(2014年11期)2014-09-11 19:27:52
组合机床与自动化加工技术(2014年9期)2014-03-01 02:21:45
